соединенного информационным входом с шиной Координата и с вторым входом второго блока совпадения, подключенного выходом к второму входу второго триггера, связанного прямым выходом с вторым входом третьего элемента И, причем вторые входы первого и второго элементов И подключены к выходу делителя частоты с пере- менным коэффициентом деления, третий вход второго элемента И и вход элемента НЕ соединены соответственно с шинами Торможение и Направление движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой линейный интерполятор | 1982 |
|
SU1065825A1 |
| Устройство для дробления стружки на станках с программным управлением | 1982 |
|
SU1072001A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU928592A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Устройство для динамической балансировки роторов | 1984 |
|
SU1173214A1 |
| Делитель частоты следования импульсов с переменным коэффициентом деления | 1981 |
|
SU1010729A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ С САМОКОНТРОЛЕМ, содержащее генерато) импульсов, первый реверсивный счетчик импульсов, первый триггер, подключениый прямым и инверсньм выходами к первым входам первого и второго элементов И, а первым входст - к выходу первого блока совпадения, первый счетчик импульсов, соединенный выходом с первым входом третьего элемента И, три элемента ИЛИ, второй блок совпадения, отличающееся тем, что, с целью расширения его функциональных возможностей путем использования абсолютных координат конечной точки траектории и обеспечения контрол программ торможения и разгона двигателя, в него введены регистр, второй реверсивный счетчик импульсов, в.торой счетчик импульсов, делитель частоты с переменным коэффициентом деления, второй триггер, четвертый элемент ИЛИ, четвертый, пятый и шестой элементы И, Шины Скорость, Координата, Запись, Направление движения, Торможение и элемент НЕ, подключенный входом и выходом соответственно к первым входам четвертого и пятого элементов И, соединенных вторыми входами с инверсным выходом второго триггера, ыходс1ми соответственно - с суммирующим и с вычитающим входами первого реверсивного счетчика импульсов и с первым и вторым входами первого элемента ИЛИ, а третьими входамис выходом генератора импульсов и с первым входом шестого элемента И, подключенного вторым входом к управлякяцему входу и выходу первого счетчика импульсов, к управляющему входу регистра, к первому и второму входам соответственно второго и первого триггеров и к установочному входу второго реверсивного счетчика импульсов, а выходом - к входу делителя- частоты с переменным коэффициентом делениХ, связанного установочным входом с выходом второго реверсивного счетчика импульсов, подключенного суммирукадим и вычи(Л т:ащацИ1 входами соответственно к выходу второго элемента и, выходу перС вого элемента Инк третьему входу первого элемента ИЛИ, соединенного выходом со счетным входом в торого счетчика импульсов, подключенного сбросовым входом к выходу второго элемента ИЛИ, а выходом - к первому входу первого блока совпадения,. связанного вторым входом с шиной Скорость, а выходом - со счетным . входом первого счетчика импульсов и :с первьол входом второго элемента ИЛИ, соединенного ЙТОЕ«М входом с установочными входами первого и второго триггеров, со сбросовым входом первого счетчика импульсов ис выходом третьего элемента ИЛИ, подключенного первым входом к выходу третьего элемента И и к первому входу четвертого элемента ИЛИ, связанного вторым бходом с шиной Записа и с вторым входом третьего элемента ИЛИ, выходом - с управляющие, входом первого реверсивного счетчика импульсов, подключенного выходом к первому входу второго йлока совпадения, а установочным входом - к выходу регистра.
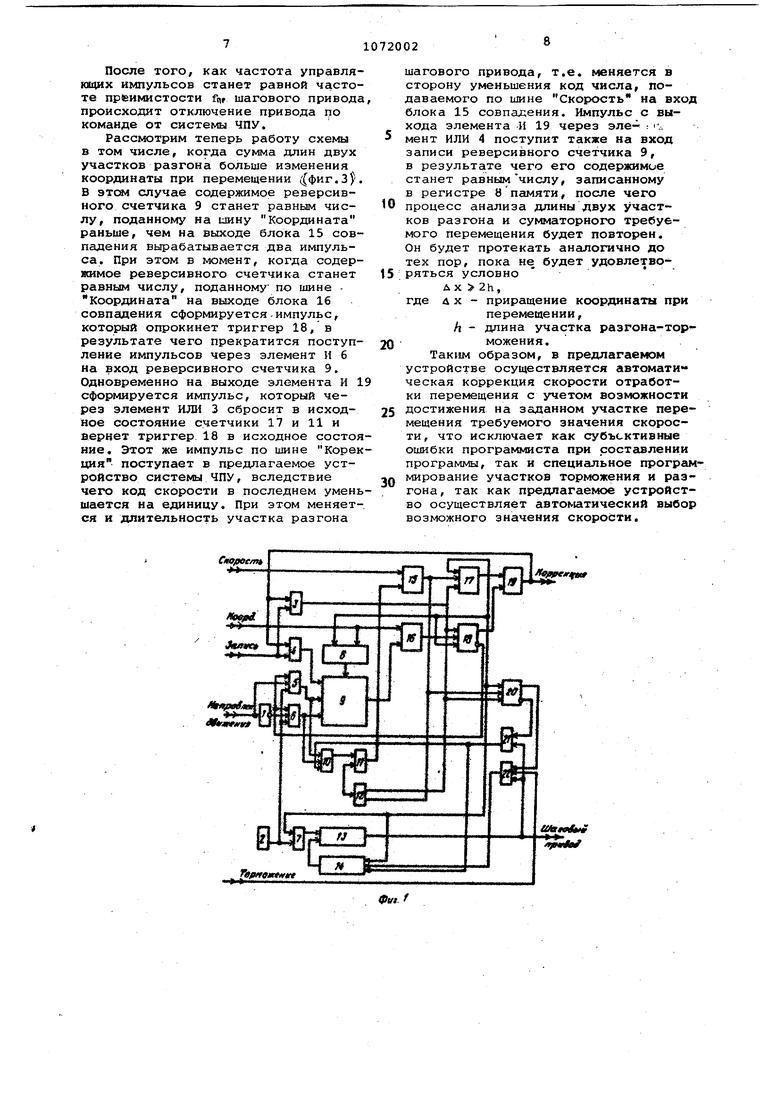
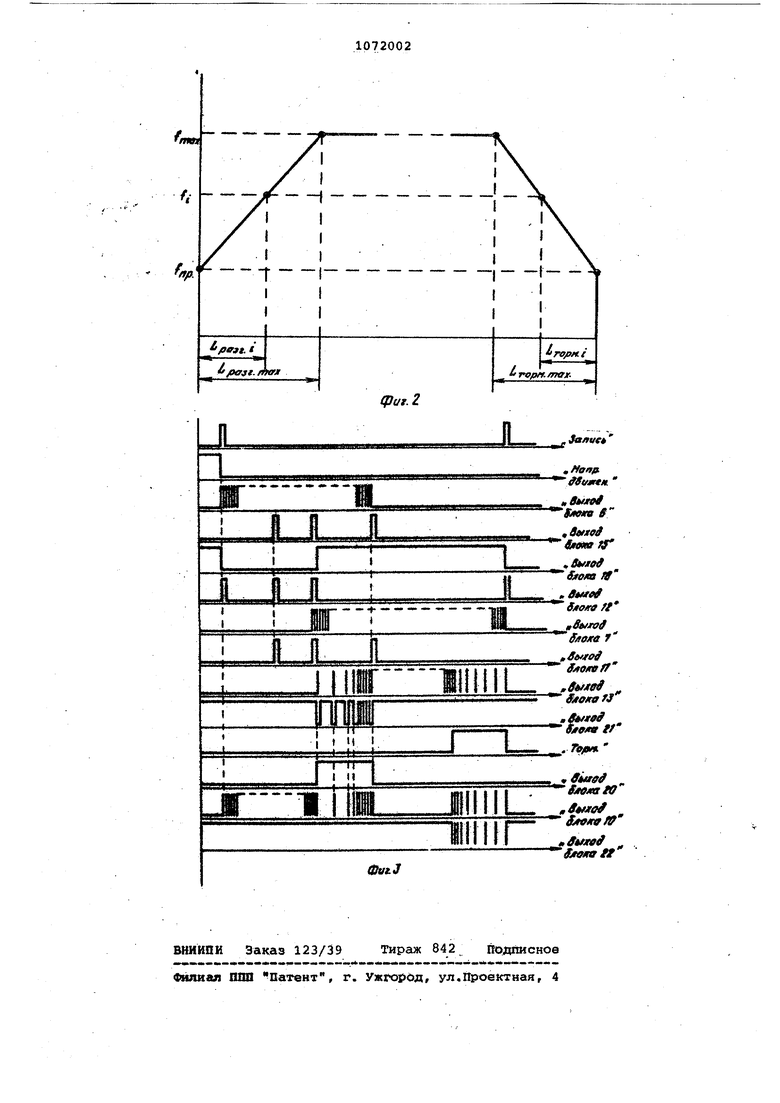
Изобретение относится к автомати ке и вычислительной технике и может быть } cпoльзoвaнo к позиционных сис темах программного управления станками. Известно устройство для разгона и замедления привода систем програм много управления станками, содержащее триггеры/ схемы И, реверсивные счетчики, делитель и вентили переноса СИ. Недостатками устройства я-вляются его сравнительная сложность и неЯбходимоеть в выборе участка торможения и разгона двигателя каждый раз заново, что усложняет програмкшрованне, . Наиболее близким техническим решением к изобретению является устройство для позиционного программно FO управдеиля, содержащее генератор якшульсов, реверсивный счетчик имиульсов, триггер, подключенный выходами к соответствующим входам эле мента 2И-ИЛИ, а первым входом - к выходу первого блока совпадения, сгчетч«к швцу 1ьсов, второй блок совп деяия, элементы ИЛИ, И t.21. Недостатком известного устройства является ограниченность применения, т.е. его можно использовать шзь тогда, когда переход s сосед« щю точку записан в виде прирааде«ия по отношению к предаадуадему знач нию, но не в виде абсолютных координат конечной точки траектории. Целью изобретения является расши рение фуякциональннх возможностей устройства путем использования абсо ) лютных координат конечной точки траектории и обеспечение контроля программ торможения и разгона двига теяя. Поставленная цель достигается те что в устройство для позиционного программного управления с самоконтролем, содержащее гевератор импуль&ор, первый реВерсиннЁ счетчик импульсов, первый триггед, подключенный прямым и инверсвым выходами к первым входам первого и второго элементов и, а первым входом - к выходу первого блока совпадения. первый счетчик импульсов, соединенный выходом с первым входом третьего элемента И, три элемента 1ШИ, второй блок совпадения, введены регистр, второй реверсивный счетчик импульсов, второй счетчик импульсов, делитель частоты с переменным коэфгфициентом деления, второй триггер, четвертый элемент ИЛИ, четвертый, пятый.и шестой элементы И, шины Скорость, Координата, Запись, Направление движения, Торможение и элемент НЕ, подключенный входом и выходом соответственно к первым входам четвертого и пятого элементов 1 соединенных вторы№ входами с инверсным выходом второго триггера, выхода1йн соответственно - с суммирующим и с вычитающим входами первого реверсивного счетчика импульсов и с первым и вторым входами первого элемента ИЛИ, а третьими входами - с выходом генератора импульсов и с первым входом шестого элемента И, подключенного вторым входом к управляющему входу и выходу первого счетчика импульсов, к управляющему входу регистра, к первому и второму входам соответственно второго и первого триггеров и к установочному входу второго реверсивного счетчика импульсов, а выходом к входу делителя частоты с переменным коэффициентом деления, связанного установочным входом с выходом второго реверсивного счетчика импульсов, подключенного суммирующим и вычитающим входами соответственно к выходу второго элемента И-, выходу первого элемента И и к третьему входу первого элемента ИЛИ, соединенного выходом со счетным входом BTopof го счетчика импульсов, подклю енного сбросовым входом к выходу второго элемента ИЛИ, а выходом - к первому входу первого блока совпадения, связанного вторым входом с шиной Скорость, а выходом - со счетным входом первого счетчика импульсов и с первым входом второго элемента ИЛИ, соединенного вторым входом с установочными входами первого и второго триггеров, со сбросовьвл входом первого счетчика импульсов и с выходом третьего элемента ИЛИ, подключенного первьом входом к выходу третьего элемента Инк первому входу четвертого элемента ИЛИ, связанного вторым входом с шиной Запись и с вторым входом третьего элемента ИЛИ, а выходом - с управляивдим входом первого реверсивного счетчика импульсов, подключенного выходом к первому входу второго;бло ка совпадения, а установочным входом - к выходу регистра, соединенного информационным входом с шиной Координата и с вторым входом втор го блока совпадения, подключенного выходом к второму входу, второго триггера, связанного прямым выходом с вторым входом третьего .элемента И, причем вторые вхрды первого и второго элементовИ под ключены к выходу делителя частоты с переменным коэффициентом деления, третий вход второго элемента И и вход элемента НЕ соединены соответственно с шинами Тормоя ение и .Направление движения , На фиг. 1 представлена блок-схема предлагаемого устройства, на фиг. Z и 3 - диаграммы, поясняющие его работу. Устройство содержит элемент НЕ 1 генератор 2 импульсов, третий и чет вертьай элементы ИЛИ 3 и 4, четверты пятый и шестой элементы И 5-7, регистр 8, первый реверсивный счет чик 9 импульсов , первый элемент Hffii 10 второй счетчик 11 импульсов, второй элемент ИЛИ 12, делитель 13 частоты с переменным коэффициентом деления, второй реверсивный счетчик 14 ймпул еов, первый и второй блоки cosniajEieния 15 и 16, первый счетчик 17 импульсов , второй триггер 1а, третий элемент И 19, первый триггер 20, пе вый и второй элемент И 21 и 22. Как известно, в диапазоне рабочих скоростей и нагрузок для шагово го привода характерно взаимооднозна ное соответствие между количеством и шульсов управления, поданных на шаговый двигатель, и углом поворота его вала или перемещение узлов с ни связанных посредством кинеглатическо передачи. В режиме разгона частота управляющих импульсов должна увелич ваться от частоты приемистости до требуемого значения. При известной скорости нарастания частоты управля щих импульсов, подаваемых на вход блока управления, можно судить в мо менте достижения заданной скорости подачи путем подсчета количества им пульсов, поступивших на вход блока управления шаговым приводом фиг. 2 Устройство работает следующим образом. Блок программ системы ЧПУ обеспечивает подачу соответствуквдих сигналов по шинам Скорость, Координата, Запись и Направление движения , необходимымх для нормального функционирования устройства, а также при выхбде исполнительного механизма , приводимого в движение шаговым двигателем, в ТОЧКУ, координаты которой соответствуют началу . участка торможения-подачу сигнала по шине Торможения для перехода в режим замедления скорости шагового движения. При выходе нсполйительного устройства в точку, соответствующую концу программа, система ЧПУ вырабатывает сигнал, закрывающий прохождение импульсов с выхода устройства на вход шагового привода, управляющего шаговым двигателем. -При этом ксжанда на останов шагового двигателя поступает непосредственно в блок шагового привода. По входной Координата на вход блока 16 совпадения и информационный вход регистра в подается число, соответствующее точке, в которую необходимо осуществить перемещение исполнительного устройства При этом в регистр 8 записаны либо координахы исходной точки движения, лиео координаты точки, в которую осуществлялось перемещение в предыдущем цикле движения. П.оСле этого по ишне Запись подается импульс, сбрасывающий в ноль содержимое счетчиков 11 и 17, устанавливающий триггеры 18 и 20 в исходное состояние и переписывакяций число, содержащееся в регистре В памяти, в реверсивный счетчик 9 СФиг. з). При этом в зависимости от направления перемещения на шину Направление движения подается уровень, соответствующий логическому нулю или единице. Пусть, для счпределенности, это уровень логического нуля, как это показано на фиг. 3 Это означает, что координата точки, в которую осуществлялось перемещение в предыдущем кадре программы, больше, чем координата точки, в которую необходимо осуществить перемещение в данном кёшре. При этом импульсы с генератора 2 через элемент И б поступают на вычитающий вход реверсивного счетчика 9, уменьшая его содержимое и, через элемент ИЛИ 10, поступают на Счетный вход счетчика 11, выход которого подключен к первому входу блока 15 совпадения, второй вход которого соединен с шиной Скорость, по которой подается число, соответствующее необходимому участку разгона двигателя
от частоты fi,p, до требуемой. При этом возможны два варианта - когда сумма длин двух участков разгона меньше, чем изменение координаты при перемещении в заданную точку или, когда эта сумма больше, чем это изменение.
Рассмотрим сначала первый случай (фиг. 3).
При этом в момент равенства содержимого счетчика 11 и числа, поданного по ишне Скорость блока 15 совпадения вырабатывает импульс, поступакяций на вход счетчика 17 и через элемент ИЛИ 12 сбрасывающий в ноль содержимое счетчика 11. Далее процесс повторяется до тех пор, пока блока 15 совпадения не выработает второй импульс, устанавливая на выходе счетчика 17 высокий уровень, разрешающий прохождение импульсов с выхода генератора 2 через элемент И 7 на вход делителя 13 частоты с переменным коэффициентом деления. При этом триггер 18 опрокидывается, запреща.я прохождение импульсов с генератора 2 на зход реверсивного счетчика 9.
Одновременно передним фонтом этого уровня осуществляется запись числа, поданного по шине Координата в регистр 8, и числа к , соответствующего начальному коэффициенту деления, в реверсивный счетчик 14 При этом
.«« -|- ft№,
где ffT - частота на выходе генератора 2;
fqp - частота приемистости шагового двигателя, К - начальный коэффициент деления.
Информация о коэффициенте деления к введена в него постоянно. Это достигается тем, что соответствующие установочные входы реверсивного счетчика 14 постоянно соединены либо с об1ф1М проводом, имитируя поступление логического нуля на данные входы, либо соединением последних с шиной питания, что соответствует поступлению логической единицы, т.е. число постоянно присутствует на установочных входах реверсивного счетчика 14,
Запись числа k , соотв етствующе го начальному коэффициенту делителя с переменным коэффициентом деления 13, в реверсивный счетчик 14 осществляет следухшщм образен. Когда блок 15 совпадения вырабатывает вто рой импульс совпадения, на выходе счетчика 17 устанавливается высокий уровень. При этом передним фронтом этого уровня осуществляется запись информация в реверсивный счетчик 14
с его установочных входов, на которых постоянно присутствует.:код, соответствующий коэффициенту деления Одновременно высокий потенцигш с выхода счетчика 17 поступает на вход элемента И 7, разрешая прохождение импульсов с генератора 2 импульсов на вход делителя с переменным коэффициентом деления.
Начальный коэффициент.деления К делителя 13 с переменным коэффициентом деления выбирается таким образом, что и при подаче импульсов с выхода генератора 2 через элемент И на вход делителя 13 с переменным коэффициентом деления на его выходе появляется импульсная последовательность с частотой, равной частоте приемистости используемого шагового движения.
Импульсы с выхода делителя 13 частоты с переменным коэффициентом деления поступают на привод шагового двигателя и через элемент И 21 поступают на вход счетчика 11. При этом каждый импульс с выхода элемента И 21 уменьшает на единицу содержимое реверсивного счетчика 14 что приводит к уменьшению периода между импульсами с выхода делителя 13 частоты с переменным коэф циентс деления, или к увеличению частоты импульсов управления
Х1 - fvM.i-
.c
fему n
К - n
При этом, когда содержимое счетчика 11 вновь станет равным числу, поданному по шине Скорость, на выходе блока 15 совпадения сформируется импульс, опрокидываюяий триггер 20, устанавливая на его инверсном выходе низкий логический уровень, эакрывг1Я прохождение импульсо через элемент И 21. Далее управлени 1|1аговым приводом осуществляется на дссированной частоте до тех пор, поИса по торможения не будет подан высокий логический уровень, раэрешатций прохождение импульеов с выхода (ели теля 13 частота с П1 ременным коэффициентом деления через элемент И 22 на суммирующий вход реверсивного счетчика 14. При этом частота следования имдульсов на выходе устройства после каждого импульса уменьшается
fr
« t-n
f г .
f вьп г
1
fr .
--f.
It
ПР
После того, как частота управлякяцих импульсов станет равной частоте прьимистости fqf шагового привода, происходит отключение привода iio команде от системы ЧПУ.
Рассмотрим теперь работу схемы в том числе, когда сумма длин двух участков разгона больше изменения координаты при перемещении ((фиг.. В этом случае содержимое реверсивного счетчика 9 станет равным числу, поданному на имну Координата раньше, чем на выходе блока 15 совпадения вырабатывается два импульса. При этом в момент, когда содержимое реверсивного счетчика станет равным числу, поданному по шине Координата на выходе блока 16 совпадения сформируется-импульс, который опрокинет триггер 18, в результате чего прекратится поступление импульсов через элемент Н 6 на вход реверсивного счетчика 9. Одновременно на выходе элемента И 19 сформируется импульс, который через элемент ИЛИ 3 сбросит в исходное состояние счетчики 17 и 11 и вернет триггер 18 в исходное состояние. Этот же импульс по шине Кореиция поступает в предлагаемое устройство системы ЧПУ, вследствие чего код скорости в последнем уменьшается на единицу. При этом меняется и длительность участка разгона
Cittpeemt
шагового привода, т.е. меняется в сторону уменьшения код числа, подаваемого по шине Скорость на вход блока 15 совпадения. Импульс с выхода элемента И 19 через эле- : i-. мент ИЛИ 4 поступит также на вход записи реверсивного счетчика 9, в результате чего его содержимое станет равнымчислу, записанному в регистре 8 памяти, после чего процесс анализа длины двух участков разгона и сумматорного требуемого перемещения будет повторен. Он будет протекать аналогично до тех пор, пока не, будет удовлетворяться условно
Д X 2h, где д X - приращение координаты при
перемещении,
/I - длина участка разгона-торможения.
Таким образом, в предлагаемом устройстве осуществляется автомати ческая коррекция скорости отработки перемещения с учетом возможности достижения на заданном участке перемещения требуемого значения скорости, что исключает как субъективные ошибки программиста при составлении программы, так и специальное программирование участков торможения и разгона, так как предлагаемое устройство осуществляет автоматический выбор возможного значения скорости.
la ffitfi
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР №.760031, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
