pa, второй вход пятого элемента 2И связан с вторым входом реверсивного счетчика и инверсным выходом третьего триггера, а выход - с вторым входом третьего регистра; первый вход второй схемы сравненяя кодов соединен с выходом первого счетчика импульсов, а второй - с выходом третьего регистра, третий делитель
частоты - перестраиваемый, еговторой вход соединен с выходом первого регистра, выход - с вторыми вхо.дами второго и четвертого элементов 2И, а выход второй схемы сравнения кодов и второй вход элемента 2ИЛИ связан с соответствующим входом и выходом блока управ ления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для измерения среднеквадратического значения сигнала | 1989 |
|
SU1728808A1 |
| Измерительный прибор | 1989 |
|
SU1661653A1 |
| Телевизионное устройство для измерения координат пятна | 1987 |
|
SU1450136A1 |
УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ, содержащее последовательно соединенные датчик дисбаланса и компаратор, датчик опорного сигнала, последовательно соединенные генератор импульсов, первьй и второй делители частоты, последовательно соединенные третий и четвертьй делители частоты, первый и второй элементы 2И, первые входы которых связаны соответственно с выходом и входом четвертого делителя частоты, последовательно соединенные первьй регистр и первую схему сравнения кодов, первьй и второй триггеры, второй регистр, первьй счетчик импульсов, блок измерения угла и блок управления, отличающееся тем, что, с целью повьшения информативности устройства, оно снабжено последовательно соединенными реверсивным счетчиком, третьим триггером, третьим элементом 2И, вторым счетчиком импульсов и третьим регистром, выход которого связан с первым входом блока измерения угпа, а второй вход последнего соединен, с выходом второго регистра, последовательно соединенными четвертым триггером и четвертым элементом 2И, выход которого связан с первым входом первого счетчика импульсов, последовательно соединенными второй схемой сравнения кодов и элементом 2ИЛИ, пятым триггером, аналого-цифровым преобразователем, вход которого связан с выходом датчика дисбаланса, а выход - с первым .входом второго регистра, инвертором, вход которого подключен к выходу компаратора и второму входу второго элемента 2И, а выход - к второму входу первого элемента 2И, элементом i И-2Ш1И, обе группы входов которого соединены с выходами блока управле(Л ния, а выход - с вторым входом первой cxeMti сравнения кодов, выход, которой связан с первыми входами первого, второго и пятого триггеров, и пятым элементом 2И, выход датчика опорного сигнала соединен с вторыми входами первого и второго делителей частоты, первого параллельного ресо to гистра, третьего триггера и второго счетчика импульсов и первьм входом четвертого триггера, второй вход 4 последнего связан с вторыми входами первого счетчика импульсов, первого, второго и пятог.о триггеров и выходом элемента 2R№, а третий вход - с выходом пятого триггера, третий вход последнего подключен к одному из входов первой группы входов элемента И-2ИЛИ, второму входу второго регистра иВЫХОДУ второго триггера, третий вход которого связан с одним из входов второй группы входов эле-мента И-ИЛИ, первым входом пятого элемента 2И и выходом первого тригге
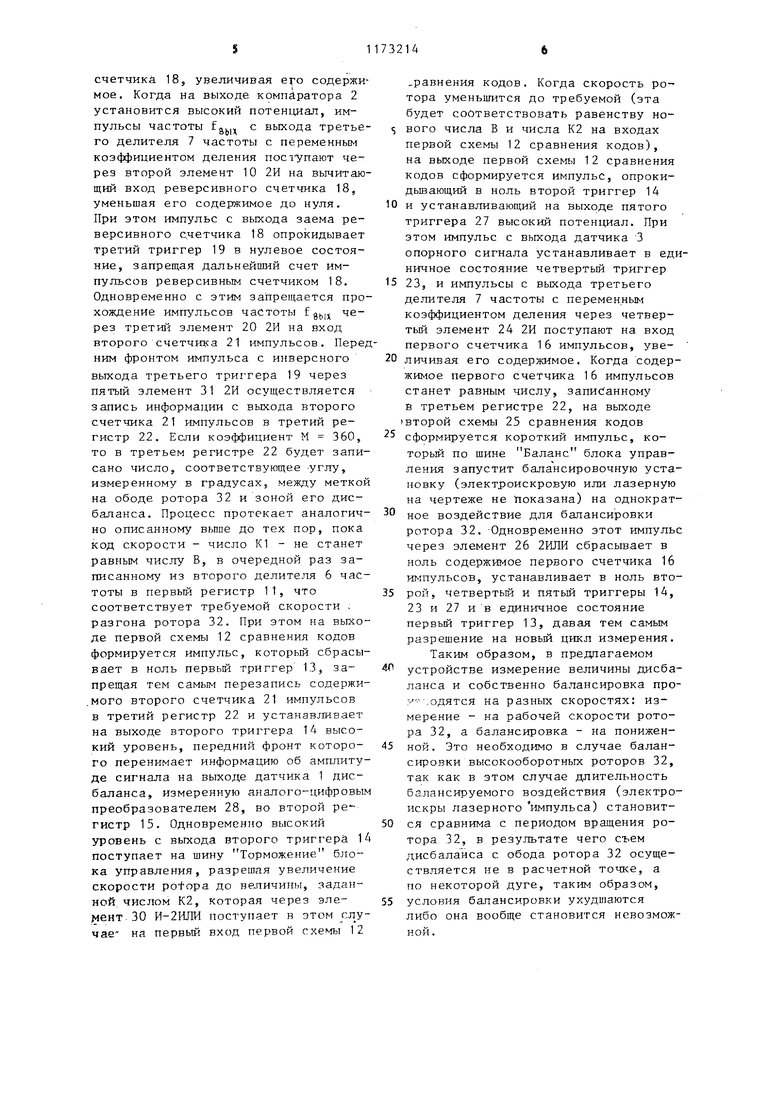
Изобретение относится к измерительной технике и может быть исполь зовано для балансировки тел врап(е, ния, в частности высокооборотных роторов. Цель изобретения - повьпиечие информативности устройства за счет определения значений дисбаланса при различных.фиксированных частот вращения ротора. На чертеже представлена структур ,ная схема устройства. Устройство для ди 1амической балансировки роторов содержит, последо вательно соединенные датчик t дисбаланса и компаратор 2, датчик 3 опорного сигнала, последовательно соединенные генератор А импулг сов, первый 5 и второй 6 делители частоты, последовательно соединенные третий 7 и четвертый 8 делители час тоты, первый и второй элементы 9 и 10 2И, первые входы которых связаны соответственно с выходом и вхо дом четвертого делителя 8 частоты, последовательно соединенные первый регистр 11 и первую схему 12 сравнения кодов, первый 13 и второй 14 триггеры, второй регистр 15, пер вый счетчик 16 импульсов, блок 17 измерения угла, блок управления (на чертеже не покапан), последовательно соеди11енные реверсивный счетчик 18, третий трипер 19, третий элемент 20 2И, второй счетчик 21 импульсов и третий регистр 22, выход которого связан с первым входом б:то ка. 17 измерения угла, а второй вход последнего соединен с выходом второго регистра 15, последовательно соединенные четвертый триггер 23 и четвертьш элемент 2А 2И, выход которого связан с первым входом первого счетчика 16 импульсов, последовательно соединенные вторую схему 25 сравнения кодов и элемент 26 2ИЛИ, пятый триггер 27, аналого-цифровой преобразователь 28, вход которого связан с выходом датчика 1 дисбаланса, а выход - с первым входом второго параллельного регистра 15, инвертор 29, вход которого подключен к выходу компаратора 2 и второму входу второго элемента 9 2И, а выход - к второму входу первого элемента 2И, элемент 30 И-2ИЛИ, обе группы входов которого соединены с выходами блока управления, а выход - с вторым входом первой схемы 12 сравнения кодов, выход которой связан с первыми входами первого, второго и пятого триггеров 13, 14 и 27, и пятый элемент 31 2И, выход датчика 3 опорного сигнала соединен с вторыми входами первого и второго делителей 5 и 6 частоты, первого регистра 11, третьего триггера 19 и второго счетчика 21 импульсов и первым входом четвертого триггера 23, второй вход последнего связан с вторыми входами первого счетчика 16 импульсов, первого, второго и пятого триггеров 13, 14 и 27 и выходом элемента 26 2ИШ1, а третий вход - с выходом пятого триггера 27, третий вход последнего подключен к одному из входов первой группы входов элемента 30 И-2Ш1И, второму входу второго регистра 15 и выходу второго 3 триггера 14, третий вход которого связан с одним из входов второй гр пы входов элемента 30 И-2ИЛИ, первым входом пятого элемента 31 2И и выходом первого триггера 13, вто вход пятого элемента 31 2И связан с вторым входом реверсивного счетчика 18 и инверсным выходом третье триггера 19, а выход - с вторым вхо дом третьего регистра 22, первый вход второй схемы 25 сравнения кодов соединен с выходом первого счет чика 16 импульсов, а второй - с выходом третьего регистра 22, третий делитель 7 частоты - перестраиваемьш, его второй вход соединен с вы ходом первого регистра 11, выход с вторыми входами второго и четвер того элементов 10 и 24 2И, а выход второй схемы 25 сравнения кодов и второй вход элемента 26 2ИЛИ связа с соответствующими входом и выходо блока управления. Устройство работает следующим об разом. I На ободе балансируемого ротора 32 нанесена контрастная метка, при прохождении которой мимо датчика 3 опорного сигнала последний вырабаты вает короткий Импульс, причем частота этих импульсов соответствует частоте вращения ротора 32. Генератор 4 импульсов, первый и второй делители 5 и 6 частоты, первый параллельный регистр 11 и перестраиваемьш третий делитель 7 частоты представляет умножитель частоты, причем частота на выходе третьего делителя 7 с переменным коэффициен.том равна частоте на выходе датчика 3 опорного сигнала, умноженной на постоянньй коэффициент, численно равный коэффициенту деления первого делителя 5 частоты. Умножитель работает следующим об р азом. Частота импульсов на выходе первого делителя 5 частоты равна: f - lo. где fg - частота импульсов на выход генератора 4 импульсов, М - коэффициент деления первого делителя 5 частоты. 14 При этом за время Т., равное периоду ротора во втором делителе 6 частоты, записано число В; период импульсов частоты tg - период импульсов частоты f Импульс с выхода датчика 3 опорного сигнала своим передним фронтом перенимает число В извторого делителя 6 частоты в первый регистр 11, а задним фронтом сбрасьшает в ноль содержимое делителей 5 и 6 частоты. В этом случае частота импульсов на выходе третьего делителя 7 частоты с переменным коэффициентом деления равна f i2 -- f М т, 8t(K В Таким образом, количество импульсов на выходе делителя 7 частоты с переменным коэффициентом деления за время, равное одному обороту ротора 32, неизменно и равно М независимо от скорости вращения ротора 32. Работа устройства начинается с подачи импульса по шине Пуск с выхода блока управления, который через элемент 26 2ИЛИ сбрасьтает в ноль содержимое первого счетчика 16 импульсов, устанавливает в нулевое состояние второй, четвертый и пятый триггеры 14, 23 и 27 и в единичное первый триггер 13. При этом на шину Разгон блока управления поступает высокий потенциал, разрешая начать разгон ротора 32. Одновременно на первый вход первой схемы 12 сравнения одов с выхода элемента 30 И-2ИЛИ поступает число К1, соответствующее скорости вращения ротора 32, на который необходимо измерить величину дисбаланса и определитькоординаты зоны дисбаланса. При вращении ротора 32 сигнал с датчика 1 дисбаланса поступает на вход компаратора 2, где преобразуется в последовательность однополярных импульсов. Когда на выходе компаратора 2 присутствует низкий уровень, импульсы частотой fjwx/2 с выхода четвертого делителя 8 частоты через первый элемент 9 2И поступают на суммирующий вход реверсивного
счетчика 18, увеличивая его содержимое. Когда на выходе компйратора 2 установится высокий потенциал, импульсы частоты fgjin с выхода третьего делителя 7 частоты с переменным коэффициентом деления поступают через второй элемент 10 2И на вычитающий вход реверсивного счетчика 18, уменьшая его содержимое до нуля. При этом импульс с выхода заема реверсивного счетчика 18 опрокидывает третий триггер 19 в нулевое состояние, запрещая дальнейший счет импульсов реверсивным счетчиком 18. Одновременно с этим запрещается прохождение импульсов частоты f
чевых
рез третий элемент 20 2И на вход второго счетчика 21 импульсов. Переним фронтом импульса с инверсного выхода третьего три1гера 19 через пятый элемент 31 2И осуществляется запись информации с выхода второго счетчика 21 импульсов в третий регистр 22. Если коэффициент М 360, то в третьем регистре 22 будет записано число, соответствующее углу, измеренному в градусах, между меткой на ободе ротора 32 и зоной его дисбаланса. Процесс протекает аналогично описанному вьппе до тех пор, пока код скорости - число К1 - не станет равным числу В, в очередной раз записанному из второго делителя 6 частоты в первый регистр 11, что соответствует требуемой скорости ; разгона ротора 32. При этом на выходе первой схемы 12 сравнения кодов формируется импульс, который сбрасывает в ноль первый триггер 13, запрещая тем самым перезапись содержи.мого второго счетчика 21 импульсов в третий регистр 22 и устанавливает на выходе второго триггера 1А высокий уровень, передний фронт которого перенимает информацию об амплитуде сигнала на выходе датчика 1 дисбаланса, измеренную аналого-цифровым преобразователем 28, во второй регистр 15. Одновременно высокий уровень с выхода второго триггера 1А поступает на шину Торможение блока управления, разрешая увеличение скорости pofopa до величины, заданной числом К2, которая через элемент 30 И-2Ш1И поступает в этом сл учае- на первый вход первой схемы 12
,равнения кодов. Когда скорость ротора уменыяится до требуемой (эта будет соответствовать равенству нового числа В и числа К2 на входах первой схемы 12 сравнения кодов), на выходе первой схемы 12 сравнения кодов сформируется импульс, опрокидьшающий в ноль второй триггер 14 и устанавливающий на выходе пятого триггера 27 высокий потенциал. При этом импульс с выхода датчика 3 опорного сигнала устанавливает в единичное состояние четвертьй триггер 23, и импульсы с выхода третьего делителя 7 частоты с переменным коэффициентом деления через четвертый элемент 24 2И поступают на вход первого счетчика 16 импульсов, увеличивая его содержимое. Когда содержимое первого счетчика 16 импульсов станет равным числу, записанному в третьем регистре 22, на выходе второй схемы 25 сравнения кодов
сформируется короткий импульс, которьй по шине Баланс блока управления запустит балансировочную установку (электроискровую или лазерную на чертеже не Показана) на однократное воздействие для балансировки
ротора 32. -Одновременно этот импульс через элемент 26 2ИЛИ сбрасывает в ноль содержимое первого счетчика 16 импульсов, устанавливает в ноль второй, четвертьй и пятый триггеры 14, 23 и 27 и в единичное состояние первый триггер 13, давая тем самым разрешение на новьй цикл измерения. Таким образом, в предлагаемом
устройстве измерение величины дисбаланса и собственно балансировка про/- - .едятся на разных скоростях: измерение - на рабочей скорости ротора 32, а балансировка - на пониженной. Это необходимо в случае балансировки высокооборотньгх роторов 32, так как в этом случае длительность балансируемого воздействия (электроискры лазерного импульса) становится сравнима с периодом вращения ротора 32, в результате чего съем дисбаланса с обода ротора 32 осуществляется не в расчетной точке, а по некоторой дуге, таким образом,
условия балансировки ухудшаются
либо она вообще становится невозможной.
2
23
L/ил
баланс /ч /ч
А А
УСГП.КЕ Уст.К
П 27
Разгон
Торпожение
| Устройство для динамической балансировки высокооборотных роторов в собранном изделии | 1971 |
|
SU506772A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для динамической балансировки лучом лазера роторов | 1982 |
|
SU1043499A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
