Изобретение относится к автоматике и вьшислительной технике и может быть использовано в магистрально- модульных системах программного управления электроприводом, например, в графопостороителях, координатных столах, станках с программным управлением или промышленных роботах.
Цель изобретения рас1шарение функциональных возможностей путем обеспечения автономной отработки модулем заданной величины перемещени с автоматическим определением момента начала торможения.
Кроме того, обеспечивается возможность вьщачи признака окончания отработки перемещения, возможность работы с координатными столами и другими объектами управления, имеющими входы -hX, -Х, +У и -У.
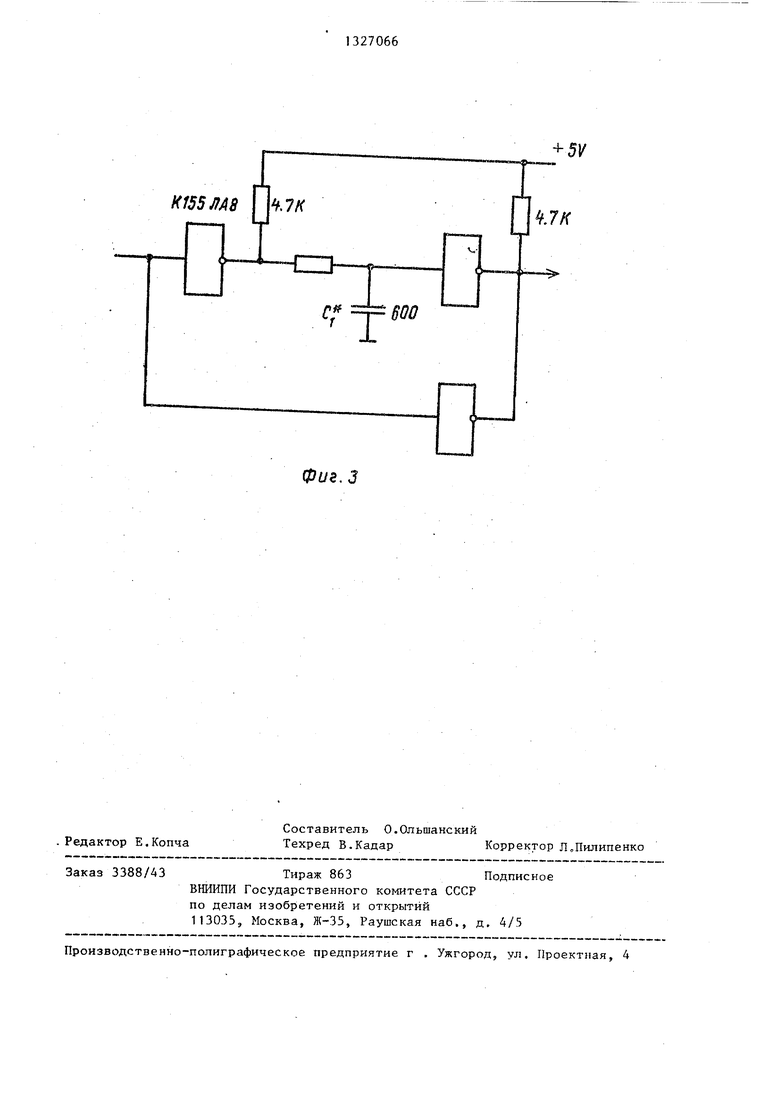
На фиг.1 изображена структурно- функциональная схема модуляj на фиг.2 - структурная схема мультиплексора, на фиг.З - пример реализации блока формирователя импульсов.
Модуль (фиг.О содержит генератор 1 импульсов, первый 2 и второй управляемые делители ча.стоты, регистр 4 задания, реверсивный счетчик 5 импульсов, счетчик 6 разгона, счетчик 7 перемещения, блок 8 совпадения, формирователь 9 импульсов, -мультиплексор 10, первый 11 и второй 12 элементы И, К.3-триггер 13, элемент 14 ИЛИ и счетчик 15 скорости
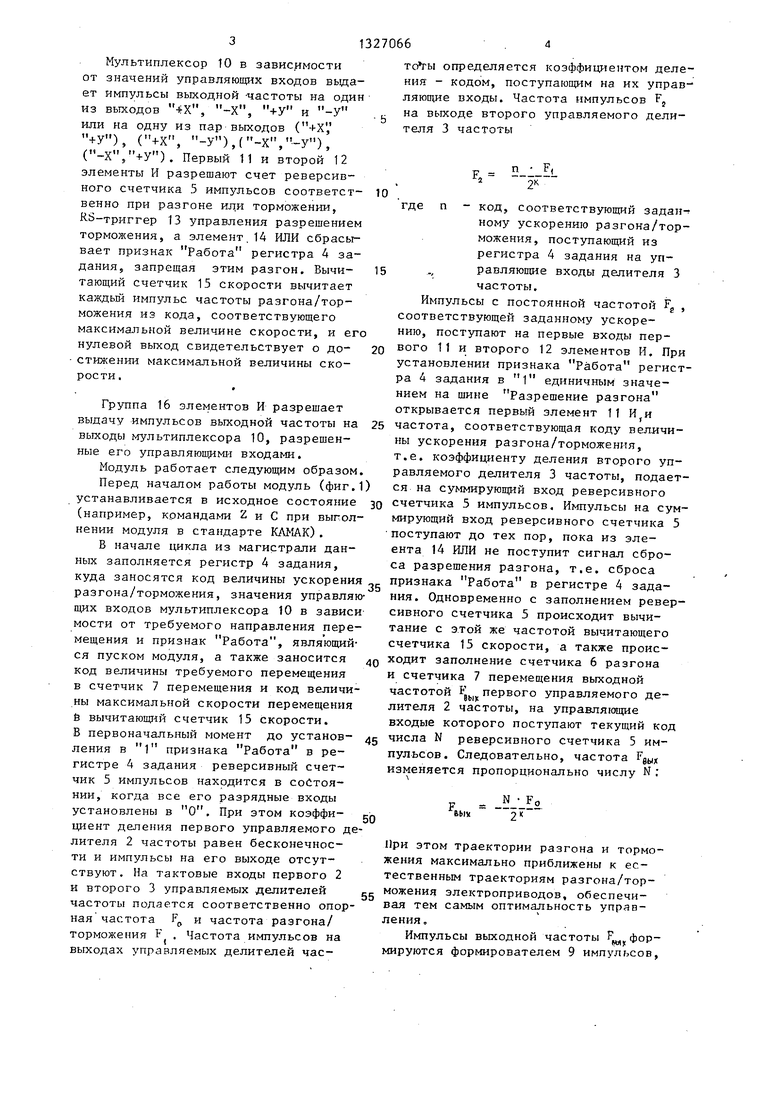
Мультиплексор 10 (фиг.2) содержит группу 16 элементов И.
В качестве управляемых делителей 2 и 3 частоты может быть применена микросхема, например 155ИЕ8, .6К0.348.006.ТУ11, у которой коэффициент деления зависит от кода на управляющих входах.Последовательность импульсов на выходе делителя частоты с переменным коэффио.иентом деления при коэффициентах деления, отличных от 2 , где k - натуральное число имеет непостоянный период следования. Для выравнивания периода следования импульсов с делителя частоты с переменным коэффициентом деления применяют усреднители, представляю- пще собой суммирующие счетчики.
В модуле может быть также применена микросхема, например ПРОГРА№1И- РУЕМЫЙ ТАЙМЕР КР 580 ВИ53, причем на одной такой микросхеме можно одновременно реализовать счетчик 15 скорости, счетчи; 7 перемещений и формирователь 9 импульсов. При этом дополнительно расишряются функциональные возможности модуля, т.е. указанная NMKpocxeMa позволяет хранить первоначально занесенные коды. Следовательно, отпадает необходимость задания
величины максимальной скорости и величины перемещения в начале каждого цикла перемещения, например,значение величины максимальной скорости перемещения может быть задано один раз в начале работы, что повышает быстродействие модуля.
Генератор 1 импульсов вырабатывает постоянную частоту, причем его первый выход является выходом опорной частоты, которая преобразуется первым управляемым делителем 2 частоты в выходную частоту, а его второй выход является выходом частоты разгона/торможения, которая преобразуется вторым управляемым делителем 3 частоты в частоту счета реверсивного счетчика 5 импульсов, которая характеризует величину ускорения разгона/торможения. Регистр 4 задания принимает
с магистрали данных и хранит код величины ускорения разгона/торможения, определяющий коэффициент деления второго управляемого делителя 3 частоты, а таюке значения управляющих сигналов +Х, -Х, +У и -У для мультиплексора 10 и признак Работа определяющий состояние шины Разрешение разгона. Реверсивный счетчик 5 импульсов суммирует импульсы частоты
разгона/торможения при разгоне и вычитает при торможении, его разрядные выходы определя от коэффициент деления первого управляемого делителя 2 частоты.
Счетчик 6 разгона ведет подсчет импульсов разгона, а счетчик 7пере- щения вычитает каждый импульс выходной частоты из величины заданного перемещения, причем его нулевой выход свидетельствует об окончании отработки заданного перемещения и является выходом запроса модуля. Блок 8 совпадения определяет момент начала торможения путем сравнения текущего кода счетчика 7 перемещения с числом импульсов разгона счетчика 6 разгона, а формирователь 9 формирует выходные импульсы с заданными параметрами, например длительностью.
Мультиплексор tO в зависимости от значений управляющих входов выдает импульсы выходной -частоты на один из выходов 4Х, -Х, +У и -У или на одну из пар выходов С +Х , ЧУ), (+Х, -У),-У), (). Первый 11 и второй 12 элементы И разрешают счет реверсивного счетчика 5 импульсов соответст- венно при разгоне иди торможении, КЗ-триггер 13 управления разрешением торможения, а элемент,14 ИЛИ сбрасывает признак Работа регистра 4 задания , запрещая этим разгон. Вычи- тающий счетчик 15 скорости вычитает каждый импульс частоты разгона/торможения из кода, соответствующего максимальной величине скорости, и ег нулевой выход свидетельствует о до- стижении максимальной величины скорости ,
Группа 16 элементов И разрешает выдачу импульсов выходной частоты на выходы мультиплексора 10, разрешенные его управляющими входами.
Модуль работает следующим образом
Перед началом работы модуль (фиг. устанавливается в исходное состояние (например, командами 2 и С при выполнении модуля в стандарте КАМАК).
В начале цикла из магистрали данных заполняется регистр 4 задания, куда заносятся код величины ускорения разгона/торможения, значения управляющих входов мультиплексора 10 в зависи мости от требуемого направления перемещения и признак Работа, являющийся пуском модуля, а также заносится код величины требуемого перемещения в счетчик 7 перемещения и код величины максимальной скорости перемещения 6 вычитаюцц-1й счетчик 15 скорости. В первоначальный момент до установления в 1 признака Работа в регистре 4 задания реверсивный счетчик 5 импульсов находится в состоянии, когда все его разрядные входы установлены в О. При этом коэффициент деления первого управляемого делителя 2 частоты равен бесконечности и импульсы на его выходе отсутствуют. На тактовые входы первого 2 и второго 3 управляемых делителей частоты подается соответственно опорная частота F и частота разгона/ торможения F , Частота импульсов на выходах управляемых делителей час
определяется коэффициентом деления - кодом, поступающим на их управ- ляющие входы. Частота импульсов F, на выходе второго управляемого делителя 3 частоты
F.
2ю 15 0
25
5
0
зо
5
где п - код, соответствующий задал- ному ускорению разгона/торможения, поступающий из регистра 4 задания на управляющие входы делителя 3 частоты. Импульсы с постоянной частотой F,
г
соответствующей заданному ускорению, поступают на первые входы первого 11 и второго 12 элементов И. При установлении признака Работа регистра 4 задания в 1 единичным значением на шине Разрешение разгона открывается первый элемент 11 частота, соответствующая коду величины ускорения разгона/торможения, т.е. коэффициенту деления второго управляемого делителя 3 частоты, подается на суммирующий вход реверсивного счетчика 5 импульсов. Импульсы на суммирующий вход реверсивного счетчика 5 поступают до тех пор, пока из эле- ента 14 ИЛИ не поступит сигнал сброса разрешения разгона, т.е. сброса признака Работа в регистре 4 задания. Одновременно с заполнением реверсивного счетчика 5 происходит вычитание с этой же частотой вычитающего счетчика 15 скорости, а также происходит заполнение счетчика 6 разгона и счетчика 7 перемещения выходной частотой Ь первого управляемого девЫ)С
лителя 2 частоты, на управляющие входые которого поступают текущий код числа N реверсивного счетчика 5 импульсов. Следовательно, частота Fgy изменяется пропорционально числу N ;
бЫУ
2
5
При этом траектории разгона и торможения максимально приближены к естественным траекториям разгона/торможения электроприводов, обеспечивая тем самым оптимальность управления ,
Импульсы выходной частоты Фор- мируются формирователем 9 импульсов.
с выхода которого с заданной длительностью, например 0,5 икс, поступают на вход мультиплексора 10. Сформированные импульсы выходной частоты коммутируются в мультиплексоре 10 в соответствии со значениями управляю- и1ДХ входов, определяемых регистром 4 задания.
При этом перемещение задается по одному из восьми -возможных.направлений. При достижении максимальной скорости . сравнении кодов счетчика 6 разгона и счетчика 7 перемещения, что свидетельствует об отработке на разгоне половш-гы заданной величины перемещения, а вторая половина должна быть отработана с торможением, сбрасывается в О признак Работа регистра 4 задания, пе вый элемент 11 И закрывается и заполнение реверсивного счетчика 5 импульсов прекращается. Далее, если запрет разгона был вызван достижением максимальной скорости, о чем свидетельствует импульс на нулевом выходе счетчика 15 скорости, содер- жащего в данный момент код О, перемещение осуществляется с постоян ной скоростью V oiKcAO появления импульса на выходе блока 8 совпадения. Максимальной скорости перемещения соответствует максимальноекода
N
.в реверсивном
значение
счетчике 5 импульсов, причем во время разгона до максимальной скорости код на выходе счетчика 5 изменяется от О до линейному закону. Если же запрет разгона вызван отработкой половины заданного перемещения на разгоне, то импульс сравнения с выхода блока 8 совпадения, вызвавший запрет разгона, также сбрасывает счетчик 6 разгона и устанавлива- -ет RS-триггер 13 в единичное состояние, который через второй элемент 12 И разрешает вычитание реверсивного счетчика 5 импульсов и перемещение происходит торможением. При этом импульсы с частотой F через второй элемент 12 И поступают на вычитающий вход реверсивного счетчика 5 импульсов, код которого i линейно уменьшается, уменьшая пропорционально частоту F . Торможение преимк
кращается при окончании отработки модулем заданного перемещения, о чем свидетельствует импульс на нулевом выходе счетчика 7 перемещения, содержа13270666
щего в данный момент код О. Этот же импульс сбрасывает KS-триггер 13 в О, запрещая торможение, блокирует выдачу импульсов выходной частоты
ьы первого управляемого делителя 2 частоты, а также в качестве сигнала запроса, подтверждающего готовность модуля к отработке следующего цикла, поступает в магистраль данных
и на выход запроса модуля. Так заканчивается цикл отработки модулем заданного перемещения.
В результате модуль находится в следующем состоянии; регистр 4 задания - код задания отработанного цикла и признак Работа, сброшенный в О, реверсивный счетчик 5 импульсов - О, импульсы на вулходе первого управляемого делителя 2 частоты отсутствуют, счетчик 6 разгона - О, счетчик 7 перемещения - О, т.е. все импульсы задания переьющения отработаны. .3-триггер 13 -- О, вычитающими счетчик 15 скорости - О (если перемещение отработано с достижением заданной ) . Таким образом, модуль готов к приему нового задания на перемещения. При необходимости отработки нового перемещения цикл повторяется.
Функциональные возможности программно управляемого модуля обеспечивают повышение эффективности ма- гистрально-модульных систем программного управления электроприводом, например в графопостроителях, координатных столах, станках с программным управлением или пром1 1шленных роботах, а также функционирования оборудования с программным управлением и вычислительной техники в целом.
Формула изобретения
Программно-управляемый модуль, содержащий блок совпадения, элемент ИЛИ, генератор импульсов, первый выход которого подключен к первому входу первого управляемого делителя частоты, управляющие входы которого соединены с выходами реверсивного счетчика, первый и второй входы которого соединены с выходами соответственно первого и второго элементов И, первые входы которых соедине)ы с выходом второго управляемого делитея частоты, а первые и вторые входы элементов И подключены соответственно к шинам Разгон и Торможение,
отличающийся тем, что, с цеп,ью расширения функциональных возможностей путем обеспечения автоном- ной отработки заданной величины nepe мещения и определения момента начала торможения,в него введены регистр задания, RS-триггер, счетчик перемещения, формирователь импульсов, мультиплексор, счетчик скорости и счет- чик разгона, первый вход которого содинен с первым входом элемента ИЛИ, с S-входом R -триггера, с выходом блока совпадения, второй вход счетчика разгона соединен с вторым входом элемента ИЛИ и выходом счетчика скорости, вход которого соединен с выходом второго управляемого делителя частоты, управляюпще входы которого соединены с первыми выходами регистра задания, второй выход которого подключен к шине Разгон, а первый вход подключен к выходу элемента ИЛИ, вторые входы регистра задания подключены к магистрали дан
ТТ ЧЩ1ПЛ у продляющих
I быШоб регистра I I задания
фиг. 2
g 5
0
5
ны, а третьи выходы регистра задания подключены к информационным входам мультиплексора, выходы которого подключены соответственно к координатным выходам управления модуля, тактовый вход мультиплексора подключен через формирователь импульсов к выходу первого управляемого делителя частоты, к третьему входу счетчика разгона и к первому входу счетчика перемещения, остальные входы которого подключены к магистрали данных, выходы - к первым входам блока совпадения, а выход счетчика перемещения подключен к второму входу первого управляемого делителя частоты, к R-BXO- ду триггера, к магистрали данных и выходу Конец работы программно-управляемого модуля, вторые входы блока совпадения подключены к выходам счетчика разгона, а входы счетчика скорости - к магистрали данных, выход триггера подключен к второму входу второго элемента И.
+ 5К
Фие.З
Редактор Е.Копча
Составитель О.Ольшанский
Техред В.КадарКорректор Л.Пилипенко
Заказ 3388/43Тираж 863Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие г . Ужгород, ул. Проектная, 4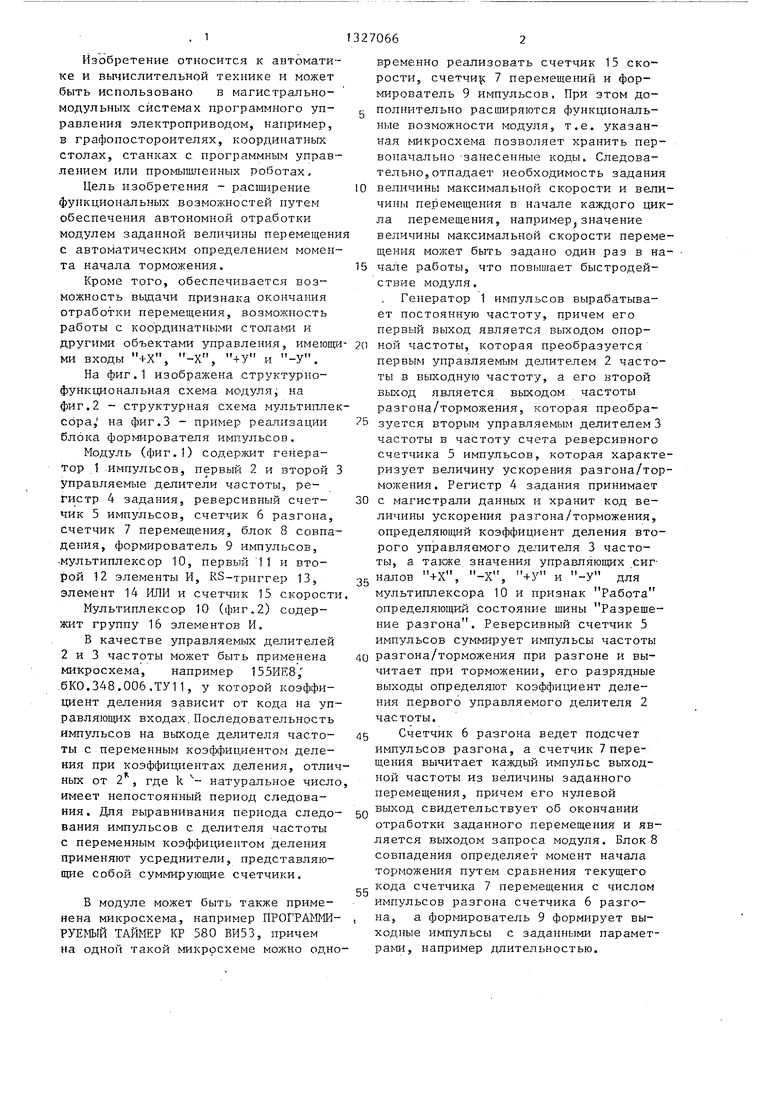
| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1386964A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
| Устройство для автоматического разгона и замедления двигателя станка с программным управлением | 1983 |
|
SU1120287A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU928592A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в магистраль- но-модульных системах программного управления. Пpoгpa мнo-yпpaвляeмый модуль содержит генератор 1, два управляемых 2 и 3 частоты, два элемента И 11, 12, реверсивный счетчик 5, элемент ИЛИ 14, блок 8 совпадения. С целью расширения функциональных возможностей путем обеспечения автономной отработки заданной величины перемещения и определения момента начала торможения, в него введены мультиплексор 10, счетчик 15 ч скорости, счетчик 7 перемещения, счетчик 6 разгона, триггер 13, регистр 4 задания и мультиплексор. Зил. g lOEnsa Siixa Фи,г. 1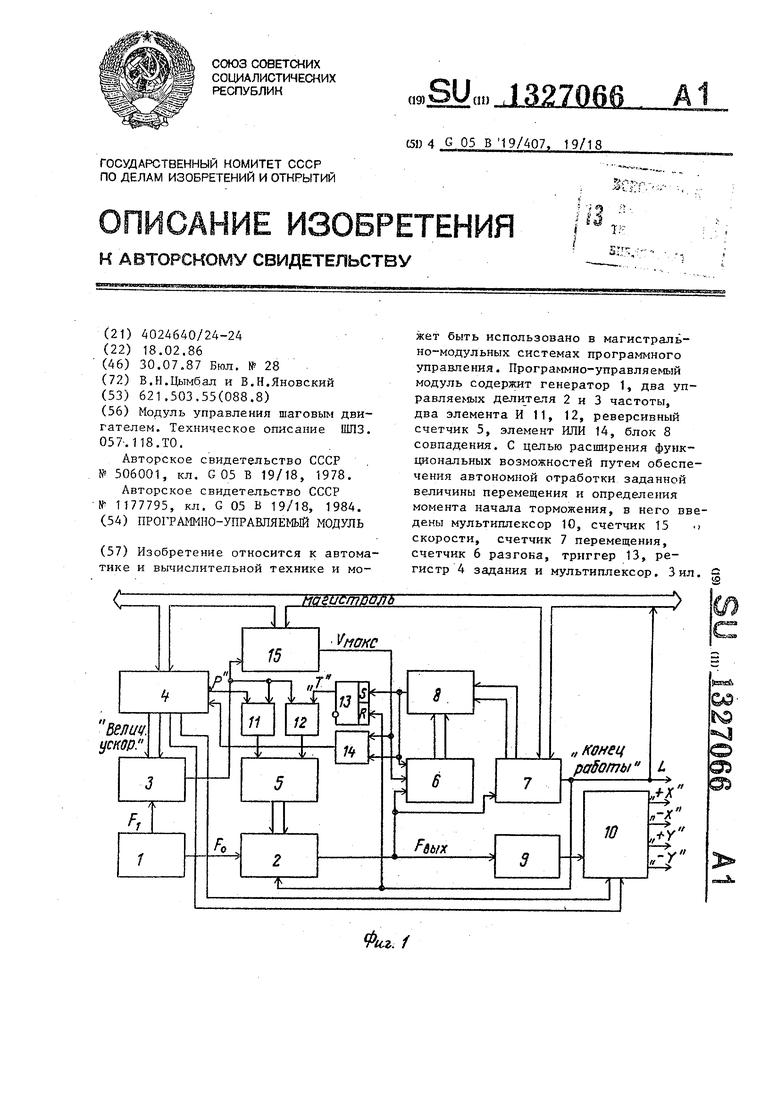
| Модуль управления шаговым двигателем | |||
| Техническое описание ШЛЗ | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Устройство для разгона и торможения исполнительного двигателя станка | 1973 |
|
SU506001A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для разгона и торможения электропривода | 1984 |
|
SU1177795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
