Изобретение относиГся к электротехнике, а именно к позиционнь электролриводам постоянного тока, и может быть использовано в электроприводах прокатных станов,.
Известен позиционный электропривщ постоянного тока, содержащий посл.едовательнб соединенные электродвигатель постоянного тока с датчиками скорости,:положения и тока,управляёьшй щзеобразователь, регуляторы тока, скорости, задатчик интенсивности, регулятор положения и задатчйк положения 1.
Наиболее близким к предлагаемому по технической С1«ан6сти и достигаемому результату является позиционны электропривод постоянного тока, содержащий электродвигатель постоянного тока, якорная обмотка которого подключена к управляемому преобразователю, с последовательно соединенными задатчиком и регулятором положения, задатчиком интенсивности и регуляторами частоты вращения и тока в его .цепи управления, а также функциональный преобразователь с квадратичной зависимостью выходного напряжения от входного, выход которго подключен к входу регулятора положения, при этом входы регуляторов соединены соответственно с датчиками положения, частоты вращения и тока 2 .
Недостатком этого электропривода являе1ся зависимость качества переходных процессов от уровня сигнала задания tta путь электродвигателя. Поэтому для обеспечения одинакового перерегулирования в переходных процессах по пути при отработке перемещений с треугольным графиком скорости перемещения коэффициент усиления регулятора положения реализуется J в виде нелинейной функции рассогласования, имеющей параболическую зависимость. Однако нелинейный регулятор положения, имеющий параболическую характеристику при работе устройства с трапециедальныг графиком скорости, обусловливает увеличение перерегулирования и колебательности в переходном процессе. Кроме того, коэффициент усиления регулятора положения, имеющего параболическую характеристику, уменьшается с ростом рассогласования по пути,ЧТо увеличивает время реверса при переходе в режим торможения, снижая быстродействие электропривода. При этом предполагается, что изменение скорости при тсчрмсякении привода в конце отработки рассогласования происходит по линейному закону и не принимается во внимание инерционность внутренних контуров регулирования системы привода и состояние остальных координат скстема (тока, выходного напряжения згшатчика интенсивности).
Эти упрощения приводят к тому, что момент начала торможения в конце отработки рассогласования выбирается с некотсфым упреждением, не завис шцим от реашьного состояния координат системы, и завершение отработки рассогласования протекает по некоторому (экспоненциальному) закону затягивая переходный процесс.
Таким образом, недостаток прототипа заклшчается в том, что система управления стрснхтся в предположении ЧТО процесс замедления привода протекает во времени линейно и при зтом не учитывается состояние других коорда1нат- системы и ине рционностй внутренних контуров регулирования, что снижает быстродействие привода, особенно при малых и средних рассогласованиях и не обеспечивает точной остановки электродвигателя в конце .отработки задания.
Цель изобретения - повышение точности остановки электродвигателя в конце отработки задания и увеличение «йлстродействия электропривода путем исключения перерегулирования по положению и сокращения времени отработки згщанного перемещения, что достигается совмертньт учетом инерционности контуров привода и текущего состояния координат система (тока, скорости, положения и v. выгодного напряжения задатчика интенсивности) ..
Указанная цель достигается тем, что в позиционном электроприводе постоянного тока, содержащем электродвигатель постоянного тока, якорная обмотка которого подключена к управляемотну преобразователю, с последовательно соединенными задатчиком и регулятором положения, задатчиком интенсивности, регуляторами частоты вращения и тока в его цепи управления, а также функциональный преобразователь с квадратичной зависимостью выходного напряжения от входного, выход которого подключен к входу регулятора положения, при этом входа регуляторов соединены соответственно с датчиками положения, частоты вращения и тока, регулятор положения выполнен в виде сумматора с релейной характеристикой, входы которого соединены дополнительно с выходами датчиков, частоты вращения и тока, а вход функционального преобразователя соединен с выходом задатчика интенсивности.
На чертеже приведена блок-схема электропривода..
Позиционный электропривод постоянного тока содержит электродвигатель 1 постоянного тока, якорная обмотка которого подключена к управ ляемому преобразователю 2, с. последовательно соединенныьш зё1датчЕиком 3 и регулятсфом 4 положения, задат чик(л«( 5 интенсивности, регуля орадш б и 7 частоты вращения и тока в цеп его управления/ а также функциональ ный преобразователь 8с квадратичной згшисимостыо выходаого напряжения от входного, выход которого под ключен к входу регулятора 4 положения, при этом входы Е егуляторов сое динены соответственно с датчиками 9 10 и 11 полсясения, частоты вращения и тока. Регулятор 4 положения выпол нен в виде сука «атора с релейной характеристикой, входы которого соеди нены дополнительно с выходами датчи ков 10 и 11 частоты вращения и тока а вход функционального преобразователи 8 соединен с выходом задатчика 5 интенсивности. Электропривод работает следующем образом. Регулятор 4 положения реализует релейную функцию управления U(x) -U| siijnF(x . где F(x) - функция переключения оптимального по быстродействию управления, имеющая вид PUlse N Vi V гиТ Выражение F(х) получено в резуль тате решения задачи оптимального по быстродействию управления динамичес кой системой . . 2 3-«2X2-V3 V4 x -UoSi%H-x Oy где X, - рассогласование между зада ным и истиным положением управляемого механизма; Х- - скорость привода; X,-- ток якоря двигателя рениеГ привода; х - выходное напряжение задатчика интенсивности. Система дифференциальных уравнений (1) - (4) описывает динам ку си темы привода, состоящей из контура скорости, содержащего в себе контур регулирования тока двигателя, и задатчика интенсивности. Ксдатур .скорости имеет передаточную функцию 2VV., где р -. оператор Лапласа; k .г- коэффициент усиления систе Т - некомпенсируемая постоянна времени систекы, и содержит в себе следующие блоки: датчик 10 частоты .вращения, электродвигатель 1, датчи (уско11 тока, силовсА управляемый преобразователь 2, например тиристорный, регулятор 7 тока и регулятсч 6 .часTOi i вращения. В соответствии с передаточной функцией ксжтура скорости коэффициенты систе С1 дифференциальных уравнений определяют из вьфажений Vt Задатчик интенсивности преобразует выходяое напряжение регулятора 4 положения его скачкообразном изменении в линейно изменякнцееся выходное напряжение х(t) до установивщегося значения и описывается уравнением (4). Функциональный преобразователь 8 прербразует выходное напряжение задатчика интенсивности в квадрат с учетом знака Хд (8гЧ +5 4Первое уравнение систеки дифференциальных уравнений описывает связь между скоростью и перемещением. Через X., обозначено заданное рассогласование x.,x,+x2, где х истинное пол якение привода, заданное положение привода. Регулятор 4 положения может Сйать выполнен, например, в виде двух последовательно соединенных операционных усилителей, входы первого из которых соединены с выходами датчика 11 тока (на который подан сигнал х - ток якоря электродвигателя) , датчика 9 положения (на который подается сигнал ) t датчика 10 частоты враицения, функционального преобразователя (на который подается сигнал х - выходной сигнал задатчика 5 интенсивности). Датчик 11 тока, датчик 9 положения, задатчик 3 положения, датчик 10 частоты вращения и функциональный преобразователь формируют выходные напряжения соответственно; выходное напряжение обратной связи датчика тока; иосп выходное напряжение обратной связи датчика положения; Ujn- выходное напряжение задатчика положения; UQ- - выходное напряжение обратной связи датчика частоты вращения; Uocin выходное напряжение обратной связи задчика интенсивности. Для получения релейной или близкой к. релейной характеристики регулятора положения 4 сопротивление обратной связи второго усилителя принимается значительно большим входного сопротивления. Обозначим а . . Н, осп 1 и -к X Эп осп 1301А осс -Чг2 VsM--%v,4S4 4 где К, - переда ост rf зй точные коэффициенты.соответствую1вд1Х звеньев 11, 9, 10 и 8. В исходном состоянии системы в начальный момент времени на вход системы подается задакнцее напр жение соответствующее зада;нию х . Тогда на выходе первого усилителя регулятора 4 положения второй усилитель регулятора 4 положения войдет в насый{ение и на его в ходе получим Up -a si T Rxl-U w nU n . (М, Под воздействием этого напряжения выходное напряжение задатчика 5 интенсивности начнет линейно возрас тать, вЬзывая соотв€ тствующий рост скорости и уменьшение рассогласования nOi пути. по мере роста (по абсолютной величине) Uocc достиг осэи « снижения рассогласования ( иj j-Upj.,, ) выходное напряжение , P{xl будет стремиться к нулю,и второйусилитель регуля тора 4 положения будет стремиться выйти из насьацения. В некоторый момент времени алгебраическая Сумма напряжений обратной связи (с учетом соответствующих коэффициентов), окажется равной нулю, а затем сменит знак () . В сийу этого обстоятельства и вы также смеходное напряжение нит знак. .С этого момента начинается торможение двигателя привода. Так как функций Р(х) описывает поверхность переключения оптимального по быстродействию управления системой (1) (4), то момент начала торможения автоматически выбирается с учетом инер ционности контура тока и скорости системы привода за счет наличия отрицательных обратных связей по скорости и току (ускорению) на 1входе ре гулятора положения Следует отметить,что, начиная с момента.торможения, регулятор 4 поло жения в соответствии с теорией оптимального управления вынуждает систему скользить вблизи поверхности переключения оптимального управления , . (7} Разрешив это выражение относитель ное х, получим, что выходное напряжение задатчика интенсивности при 1тимальности управлении должно изме няться по закону (не учитывая знак выражения тока) Vп. 1« /и,3 Бели не учитывать инерционность контура тока и скорости (положив ), получим широко распространенное выражение для построения регулятора положения , x;5i,x K y;r;-si nx .(9) Принципиальное отличие оптим;ального управления от управления по закону„ . (. (° заключается в том, что момент начала торможения при оптимальном управлении задается несколько раньше, чем при неоптимальном, при этом учитываются как параметры настройки контуров скорости, и тока (k, U.,-, Т) , так и текущие значения скорости и тока (х, Xj) привода. С момента начала торможения Up больше нуля (теоретически на бесконечно малую величину), а напряжение Upn устанавливается на уровне ограничения второго усилителя (например, 24 В) . Напряжение задатчика ин-генсивности. стремится по линейному закону к значению х.-24 В, скорость привода с некоторым запаздыванием следует за ВЫХОДНЫМ напряжением задатчика интенсивности. В момент достижения напряжением эадатчика интенсивности нулевого значения значение Upn остается больше нуля и значение Х4 продолжает изменяться в сторону отрицательных значений. При достижении выходным напряжением за атчика интенсивности некоторого отрицательного значения выходное напряжение первого усилителя регулятора положения вновь изменяет знак и значение Upn снова становится равным 24 В. Напряжение Хл, начиная с этого момента, стреится к:нулю одновременно со скоростью и током двигателя. Таким образом, за последнего переключения управляющего воздейстия Upn происходит одновременное гаение выходного напряжения задатчика нтенсивности, частоты вращения и то-, ка двигателя, чем обеспечивается останов привода после отработки заданного рассогласования. Последнее утверждение теоретичеси неточно, так как при оптимальном правлении Колебательной системой точный переход в нуль координат осу ствляется за большее, хотя и конечое число переключений. Однако пракически переходные процессы заканчиваются после двух-трех переключений.
710722238
Таким образом, в предлагаемомвне электропривода заданного перемеэлектроприводе за счет исключения пе-щения и обеспечивается точная остаререгулирования по положению и сохра-новка электродвигателя. Общее
нения времени отработки заданного пе-время торможения сокращается
ремещения увеличивается быстродейст-на 20%.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Устройство для управления вентильным позиционным электроприводом постоянного тока | 1984 |
|
SU1261934A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
ПйЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержсшшй электродвигатель постоянного тока, якорная обмотка которого подключена к управляемому преобразователю, с последовательно соединенными задатчи- - ком и регулятором положения, задатчиком интенсивности, регуляторами част.оты вращения и тока в его цепи управления, а также функциональный преобразователь с квгц ратичной эгшисимостыо выходного напряжения от входного, выхсщ которого подключен к входу регулятора положения, при этом входы регуляторов соеди нены соответственно с датчиками положения, частоты вращения и тока, отличающийся тем, что, с целью повышения точности остановки электродвигателя в конце отработки задания и увеличения быстродействия электроприрода, регулятор положения выполнен в виде сумматора с релейной характеристикой, входы которого сл соединены дополнительно с выходами датчиков частоты вращения и тока, а вход функционального преобразователя соединен с выходом задатчика интенсивности. ю ю ю со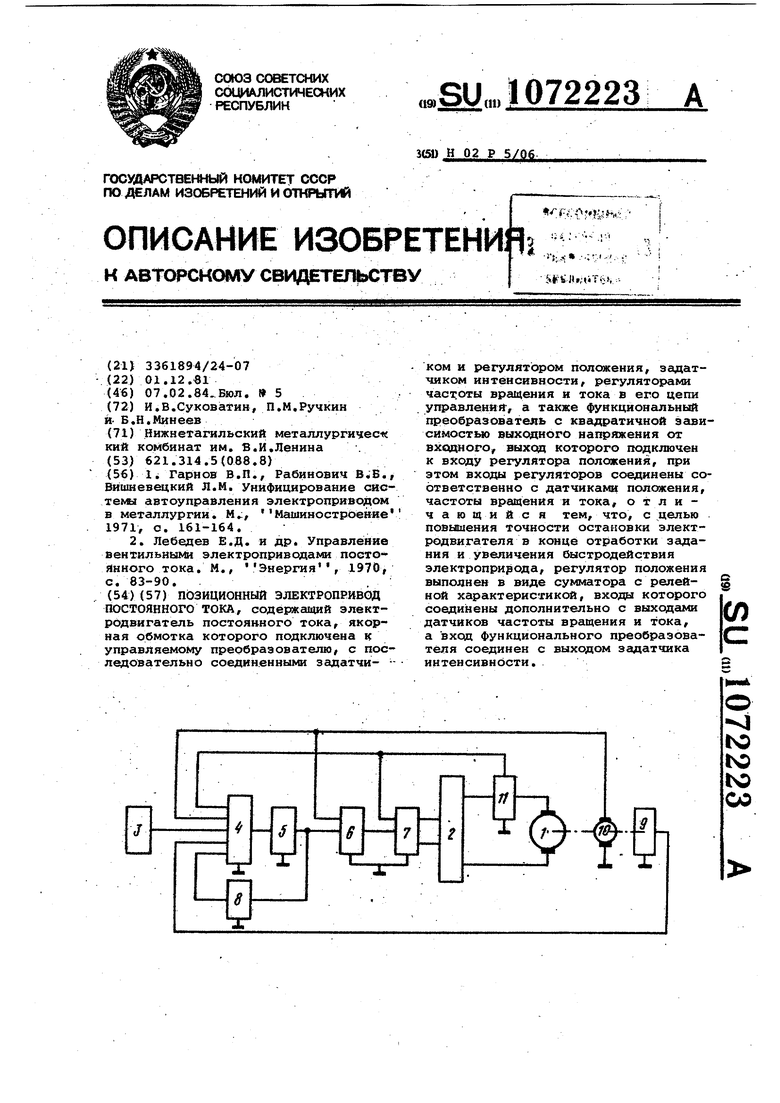
| li Гарнов В.П., Рабинович В.Б., Вишневецкий Л.М | |||
| Унифицирование систекы автоуправления электроприводом в металлургии | |||
| М.;, Машинострое ие 1971, о | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лебедев В.Д | |||
| и др | |||
| Управление вентильными электроприводами постоЯнного тока | |||
| М., Энергия, 1970, с | |||
| Пуговица | 0 |
|
SU83A1 |
