1
Изобретение относится к электротех- нике и может быть использовано для отработки рассогласования по пути приводимым электроприводом, ведомым валом H eaaBHCHMbiv непрерывно вращающи1«1ся ведущим валом в электроприводах летучих ножниц для разрезания движущегося материала, например проката, на куски заданной длины, работающих по принципу изменения (обычно снижения) скорости вращения ножей (т.е. ведомого вала) период между резами относительно скорости движения материала с последующей синхронизацией ножей с материалом в зоне {эеза. Роль ведущего вала здесь выполняют следящие ролики, приводимые во вращение движущимся материалом.
Известно устройство позиционного управления электроприводом летучих , выполненное по тахометрической . схеме с контролем положения только ведомого вала (ножей), которое содержит регулятор скорости ведомого вала, датчики скорости ведомого и ведущего
валов и датчик положения (командоаппарат) ведомого вала. Указанное устройство реализует трапецеидальный закон изменения скорости вращения ведомого вала при отработке.рассогласования по пути, обеспечивающий экономичное использование двигателя в этом режиме 1 ,
Недостаток известного устрсЛства состоит в том, что оно не позволяет получить высокой точности обработки
10 рассогласования по пути, а следовательно, не обеспечивает высокой точности порезки материала, поскольку в устройстве не контролируется положение ведущего вала, а контроль положения ведомого
15 вала производится лшиь в одной точке его пути (точке начала разгона) и, таким образом, практически на всем участке отработки рассогласования по пути устройство работает по тахометри20ческой схеме, будучи разомкнуто по положению.
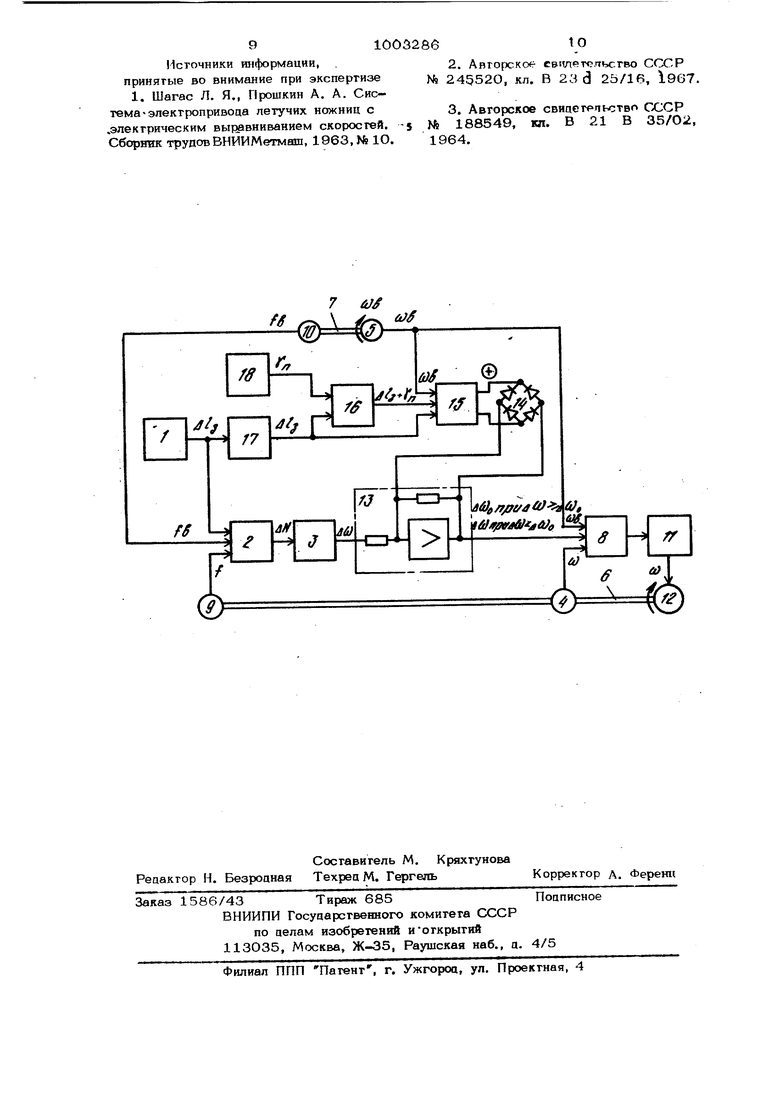
Известно также устройство познциов ного управления электроприводом летучих S1 ножниц, выполненное по гахомегрической схеме, но с контролем пути только вецу- шего вала (контролем алины маге риала), которое содержит регулятор скорости ведомого вала, датчики скорости вецомого и ведущего валов, переключатель скорости ведомого вала, датчик пути и датчик уставки пути ведущего вала, узел совпадения величин текущего и заданного пути, триггер, включенный на выход узла совпадения, релейный усилитель, подключенный к выходу триггера, и переключатель скорости ведомого вала, управляемый релейным усилителем. Указанное устройство таюне реализует трапецеидаль ный график изменения скорости, но благо даря наличию контроля пути . ведущего оно в принципе обеспечивает более высокую точность порезки материала 2 Однако ввиду отсутствия в этом устройстве контроля положения ведомого вала, а также из-за того,что после .срабатывания узла совпадения и переключения цепей переключателя скорости ведомого вала устройство на участке синхронизации этого вала с ведущим валом (т.е. на участке разгона) и движения его на установившейся скорости синхронно с ведущим валом работает по тахо- метрической схеме безконтроля по пути, точность отработки рассогласования по пути, реализуемая указанным устройством оказывается недостаточно высокой. Наиболее близким к предлагаемому является устройство для позиционного управления электроприводом постоянного тока для отработки рассогласования по пути между приводным ведомым валом и не зависимым непрерывно вращающимся ведущим валом, содержащее задатчик рассогласования по пути, реверсивный счетчик и реверсивный цифроаналоговый преобразователь, соединенные последовательно, датчики скорости ведомого и ведущего валов, выходы которых соединены соответственно с первым и вторым входами регулятора скорости, и датчики пути ведомого и ведущего валов, подключенные своими выходами к счетным входам реверсивного счетчика, регулятор скорости ведомого вала, выход которого через исполнительный элемент подключен . к якорной обмотке электродвигателя Гз1 Недостаток данного устройства состоит в том, что изменение скорости ведо- .мого вала происходи по треугольному графику, при котором в отличие от трапецеидального графика двигатель разви66вает динамический момент в течение всего времени отработки рассогласования по. пути, что приводит к излишнему раоходу энергии в двигателе. Цель изобретения - уменьшение потерь энергии в двигателе ведомого вала. Указанная цель достигается тем, что устройство дополнительно снабжено операционным усилителем, диодным мостом, множительно-делительным блоком, сумматором, нереверсивным цифроаналоговым преобразэвателем и источником постоянноро напряжения, причем вход операционного усилителя соединен с вьтходом реверсивногоцифроаналоговото преобразователя, выход - с третьим входом регулятора скорости, а параллельно цепи обратной связи операционного усилителя через диодный мост включен выход множительно-делительного блока, первый вход умножения которого соединен с выходом датчика скорости ведущего вала, второй вход умножения соединен с первым входом сумматора и выходом нереверсивного цифроаналогового преобразователя, подключенного входом к выходу зада т- чика рассогласования по пути, а вход деления множительно-делительного блока соединен с выходом сумматора, второй вход которого подключен к вьтходу источ|Ника постоянного напряжения. На чертеже представлена функциональная схема устройства позиционнрго управления электроприводом постоянного тока. Устройство для позиционного управления электроприводом постоянного тока содержит аадатчик 1 рассогласования по пути, реверсивный счетчик 2 и реве1 сивный цифроаналоговый преобразовагепь 3, соединенные последовательно, датчики 4 и 5 скорости, ведомого 6 и ведущего 7 валов, выходы которых соединены соответственно с первым и вторым входами регулятора 8 скорости и датчики 9 и 10 пути ведомого 6 и ведущего 7 валов, подключенные своими выходами к счетным входам реверсивного счетчика 2, исполнительный элемент 11, подключенный к якорной обмотке электродвигателя 12 ведомого вала 6 и связанный своим входом с выходом регуляторе 8 .скорости. Кроме того, устройство содержит операционный усилитель 13, диодный мост 14, множительно-делительный блок 15, умматор 16, нереверсивный цифроаналоговый преобразователь 17 и источник 18 постоянного напряжения, причем . вход операционного усилителя- 13 соединен 510 с выхоцом реверсивного цифроаналоговог прербразовагеля 3, выход - с третьим входом регулятора 8 скорости, а параллельно цепи обратной связи операционного усилителя 13 через аиоаный мост 14 включен выход множительно-целительного блока 15, первый вхоц умноже ния которого соединен с выходом датчик 5 скорости ведущего вала 7, второй вхо умножения соединен с первым входом сумматора 16 и выхоцо й нереверсивног цифроаналогового преобразователя 17, подключенного своим входом к выходу задатчика 1 рассогласования по пути, а вхоц деления множительно-целительног го блока 15 соединен с выходом сумма ра 16, второй вход которого подключен к выходу источника 18 постоянного напряжения,. Устройство работает следующим образом. При вводе в реверсивный счетчик 2 сигнала заданного рассогласования по пути межпу ведущим 7 и ведомым 6 ва лами, uiE-, , образуемого задатчиком 1 рассогласования, на выходе счетчика 2 появляется числовая информация AN, пропорциональная в первый момент сигналу Лб 1 выходе реверсивного цифроаналогового преобразователя 3 возникает аналоговый сигнал перепада скорости ukU) ведомого вала 6 относител но ведушего вала 7, который соответствует значению ДМ . Операционный усилитель 13 переводится сигналом Л(1) а режим ограничения, при котором его.выхо ной сигнал, предетавлякядий собой сигна перепада скорости, поступающий на вход регулятора 8 скорости, равен сигналу i ограничения iCWQB цепи обратнсй связи этого усилителя, определяемому сигнало подпора диодного моста 14, создаваемы множнтельно-деаительным блоком 15 в соответствии с уравнением Au,.ic iV&ll .-уп гае Щ - скорость вращения ведущего вала, сигнал которой вырабатывается датчиком 5 скорости; - угловой путь движения ведомого вала 6 с измененной скоростью, определяемый сигналом источника 18 посто янного напряжения; К - коэффициент пропорциональ 86 ности, опрепеляемый соотношениемu gwOKc Гп гцеЙ максимальная величина скорос Ти вращения ведущего вала 7-. t. - угловое ускорение ведомого вала 6, регламентируемое контуром регулирования скоАналоговый сигнал Ь, , используемьтй для вычисления (DQ 1 поступает на вход сумматора 16 и вход умножения множитёльно-делительного блока 15 с выхода нереверсивного цифроаналогового преобразователя 17. Если заданное рассогласование по пути йВ соответствует отставанию ведомого вала 6 от ведущего (что характерно для случая летучих ножниц), то знак сигнала , таков, что сигнал перепада скорости, поступающий на вход регулятора 8 скорости, направлен встречно сигналу скорости вращения ведущего вала 7 Ш , в результате чегб сксурость Cfi) вращения едомого вала 6 снижается на величину с постоянным ускорением ё- и поддерживается на этом уро&но до тех пор, пока значение сигнала tiUDHa входе операционного усилителя 11 будет превышать значение сигнала ограничения . По мере отработки заданного рассогласования по пути содержимое ревёрси&ного счетчика 2 изменяется в связи с поступлением на его счетные входы импульсной информации ,о пути, проходимом ведомым 6 и ведущим 7 валами, которая -вырабатывается соответственно датчиками 9 и 1О. При указанном выше знаке заданного рассогласования по пути первый .счетный вход счетчика 2 (вход t) работает в режиме сложения, а второй счетный вход (вход - в режиме вычитания. Поскольку вслепсгвие замепле- ния ведомого вала 6 g содержимое счетчика 2 уменьшается, следовательно, уменышется значение сигнала fi.U) на входе операционного усилителя 11. При достижении этим сигналом значения jMfo диодный мост 14 запирается и операционный усилитель 11 выходит из состояния ограничения, после чего выходной сигнал усилителя 11 начинает уменьшаться, следуя за уменьшением сигнала ii (I/ на его выходе. В результате этого скорост 7100 вращения вецомого вала 6 fi3 увеличивается с постоянным ускорением . Процесс разгона оканчивается по достижении скорое гьюС) значения U, а рассогласованием fckbl и соответственно сигналом /MU нулевого значения. В этом случае, когца запан юе рассог пасование по пути соогвегствует опере- жению вецомым валом 6 ведущего вала 7, знак сигнала U.E-3, , вводимого в счетчик 2, будет обратным и поэтому сигнал перепада скорости на входе регулятора 8 скорости окажется согласным с снгна лом скорости вращения ведущего вала 7. Таким образом, в этом режиме ско- рость вращения ведомого вала 6 увеличится на величину Д.Шо . Из-за смены знака сигнала АЕ /записанного в счет чике 2, его счетные входы поменяются ролями: вход будет работать на вычи- тание, а вход , - на сложение, а по- & - . скольку в этом режиме Xg, т , то содер жимое счетчика, как и в первом случае, будет уменьшаться по мере отработки рассогласования. Поскольку цифроаналоговый преобразователь 17 выполнен нереверсивным, знак аналогового сигнала на его выходе останется неизменным и вычисление сигнала.перепада скорости AUiJo будет производиться, как и прежде, 3 соответствии с уравнением (1), по- лярносгь его не изменится.. При досги- жении сигналом иЦ)значения начнется торможение ведомого вапа 6, которое закончится его синхронизацией с ведущим валом 7. В режиме синхронного вращения валов 6 и 7 контур регулирования положения остается замкнутым и обеспечивает равенство частот 5 и Eg, при котором o,U о, а UJ Шр. в случае возникновения какого-либо рассогласования .по пути в этом режиме образуется неравенство сигналов и 5,,, в результате чего появится сигнал и) соогвегствующего знака, обеспечиваюи1ий устранение этого рассогласования. Прецпагаемое устройство обеспечивае минимальный расход энергии в двигателе при отработке рассогласования по пути благодаря тому, что в уравнение (1) для вычисления перепада скорости ixCJUp в качестве постоянного параметра зало- угловой путь движения вецомого вапа с измененной скоростью ТГр в рейультате чего величина этого параметра остается практически постоянной при любом значении рассогласования по пути b.Ej , и если величину Zvt установить 0а максимапьна возможной, то значения iK-fienan,a скорости при всех значениях ДЕ..будут минимальными, вследствие чего продолжительность участков разгона и торможения привоца окажется наи меньшей. В то же время наличие регулятора положения, контролирующего рассогласования по пути между ведущим и ведомым валами на протяжении всего цикла работы, обеспечивает высокую точность отработки заданного рассогласования. Ф ормула изобретения Устройство для позиционного управ- пения электроприводом постоянного тока для отработки рассогласования по пути между приводным ведомым валом и независимым непрерывно вращающимся вецушим валом, содержащее задатчик рассогласования по пути, реверсивный счетчик и реверсивный цифроаналоговый преобразователь, соединенные последовательно, датчики скорости ведомого и ведущего валов, выходы которых соединены соответственно с первым и вторым входами регулятора скорости, и датчики пути ведомого и ведущего валов, подкпкэненные выходами к счетным входам реверсивного счетчика, регулятор скорости ведомого вала, выход которого через исполнительный элемент подключеи к якорной обмотке электродвигателя, отличающееся тем, что, с цепью уменьщения потерь энергии в двигателе ведомого вала, оно снабжено операционным усилителем, диодным мостом, множительно-делитель1 ым блоком, сумматором, нереверсивным цифроанапоговым преобразователем и источником постоянного напряжения, причем вход операционного усилителя соединен с выходом реверсивного цифроаналогового преобразователя, выход с .третьим входом регулятора скорости, а параллельно цепи обратной связи операционного усилителя через диодный мост включен выход мйожитепьно-делительного блока первый вход умножения которого соединен с выходом датчика скорости ведущего вала, второй вход умножения соединен с первым входом сумматора и выходом нереверсивного цифроаналогового преобразователя, подключенного входом к выходу задатчшса рассогласования по пути, а В.ХОД деления множительно-делительного блока с.оединен с выхо дом сумматора, второй вход которого попключен к выходу источника постоянного напряжения.
Источники Ш формации, принятые во внимание при экспертизе 1. Шагас Л. Я., Прошкин А. А. Система-электропривоца летучих ножниц с .электрическим выдавниванием скоростей.
Сборник трудовВНИИМетмаш, 1963,№ 10.1964.
2.Авго{)ское евипетсяьство СССР № 245520, кл. В 23 d 25/16, 1967.
3.Авторское свицетепьство
5 M 188549, кп. В 21 В 35/02,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1986 |
|
SU1345171A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Устройство для автоматического запуска и регулирования уровня жидкого металла в кристаллизаторе машины непрерывного литья стали | 1978 |
|
SU730460A1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU746418A1 |
| Устройство для измерения и регулирования соотношения скоростей | 1984 |
|
SU1224726A1 |
| Устройство для управленияпРиВОдОМ | 1978 |
|
SU809056A1 |
Г8
dif
л
iu)g/r/ft/4fef W igevAff a a
