1 Изобретение относится к электротехнике и может найти применение в механизмах, требующих ВЬЕСОКОЙ точно ти стабилизации скорости при ударны нагрузках, например в многодвигательных приводах клетей непрерывных прокатных, трубопрокатных станов и других агрегатов, имеющих экономическую схему питания от группового источника и индивидуальные возбудители. Известен электропривод постоянного тока, -содержащий включенные по схеме подчиненного регулирования задатчик частоты вращения, регулятор частоты вращения, инвертор с ограничителем, регулятор тока, силовой пре образователь, двигатель и датчики обратных связей по частоте вращения току и напряжению двигателя. При этом датчик тока подключен к входам инвертора и регулятора тока, а датчик напряжения - к другому входу инвертора, так что инвертор выполняе функции пропорционального регулятора ЭДС двигателя СПОднако этот электропривод не обес печивает управления двигателем по це пи возбуждения при экономичной схеме питания от группового источника и быстродействующей отработки динамических провалов частоты вращения при ударных приложениях нагрузки вследствие повышенной колебательности из-за наличия в регуляторе скорос ти интегральной части. Известен также электропривод постоянного тока, содержащий включенные по схеме подчиненного регулирова ния задатчик частоты вращения, регулятор частоты вращения, регулятор тока, силовой преобразователь, двигатель и датчики обратных связей по частоте вращения, току и моменту дви гателя, причем датчик момента подключей по схеме положительной связи к входу регулятора тока с21. Однако данный электропривод не обеспечивает управления двигателем по цепи возбуждения при экономичной схеме питания от группового источника, требует установки на передаточно валу от двигателя к механизму датчика момента, что усложняет установку. Наиболее близким к изобретению по технической сущности и достигаемому результату является электропривод постоянного тока, содержащий электродвигатель, в цепь возбуждения которого включены последовательно соединенные задатчик и регулятор частоты вращения и последовательно соединенные регулятор потока возбуждения и возбудитель, а также блок перемножения и подключенные к входам соответствующих регуляторов датчики частоты вращения и потока возбуждения 13. Недостатками извecтнoгoi электропривода являются низкая надежность в связи с отсутствием токоограничения при перегрузках двигателя, а так же низкие быстродействие и точность стабилизации частоты вращения при ограничен«ости напряжения возбудителя и соответственно форсировок возбуждения. Ограниченность форсировок возбуждения является причиной того, что при ударном приложении нагрузки и отработке рассогласования по частоте вращения регулятор потока возбуждения не в состоянии скомпенсировать инерционность обмотки возбуждения двигателя как объекта регулирования потока возбуждения. Это вызывает возрастание эквивалентной инерционности внутреннего контура регулирования потока возбуждения, а для обеспечения устойчивости работы электропривода при этом необходимо соответственно увеличивать инерционность внеш- него контура регулирования частоты вращения.-Это приводит к снижению быстродействия электропривода, замедленной отработке динамических провалов частоты вращения при ударных приложениях нагрузки и соответственно к понижению точности стабилизации частоты вращения. Цель изобретения - повьшение надежности и точности стабилизации частоты вращения при ударных нагрузках. Цель достигается тем, что в электропривод постоянного тока, содержащий электродвигатель, в цепь возбуждения которого включены последователь- но соединенные задатчик и регулятор частоты вращения и последовательно соединенные регулятор потока возбуждения и возбудитель, а также блок перемножения и подключенные к входам соответствующих регуляторов датчики частоты вращения и потока возбуждения , введены последовательно соединенные инвертор с ограничением
и первый усилитель, последовательно соединенные интегратор и второй усилитель, а также датчик тока якоря, выход которого соединен с входами инвертора и первого усилителя, при 5 этом вход инвертора связан с выходом регулятора частоты вращения, а выход первого усилителя подключен к входу регулятора потока возбуждения, третий и четвертый входы которого ю соединены соответственно с задатчиком частоты вращения и с выходом второго усилителя, вход которого связан с датчиком частоты вращения, а входы интегратора подключены к вьгхо- J5 дам второго усилителя и блока перемножения, соединенного входами с датчиками потока возбуждения и тока якоря.
На фиг. 1 приведена функциональ- JQ ная схема электропривода; на фиг.2 функциональная схема регулятора частоты вращения, регулятора потока возбуждения, инвертора с ограничением и первого усилителя; на фиг. 3 и 4 - 25 диаграммы, поясняющие работу электропривода.
Электропривод содержит электродвигатель с якорной обмоткой 1 и обмоткой 2 возбуждения, в цепь которой 30 включены последовательно соединенные задатчик 3 и регулятор 4 частоты вращения и последовательно соединенные регулятор 5 потока возбуждения и возбудитель 6, а также блок 7 пе- 35 ремножения и подключенные к входам соответствующих регуляторов датчики 8 и 9 частоты вращения и потока возбуждения. Электропривод также содержит последовательно соединенные ин- 40 вертор 10 с ограничением и усилитель 11, последовательно соединенные интегратор 12 и усилитель 13, а также датчик 14 тока якоря, выход которого соединен с входами инвертора 10 45 и усилителя 11, при этом вход инвертора 10 связан с вькодом регулятора 4 частоты вращения, а выход усилителя
11 подключенк входу регулятора 5 потока возбуждения, третий и четвер- 50 тый входы которого соединены соответственно с задатчиком 3 частоты вращения и с выходом усилителя 13, вход которого связан с выходом датчика 8 частоты вращения,а входы интегратора 55
12 подключены к выходам усилителя 13 и блока 7 перемножения, соединенного своими входами с датчиком 9 потока возбуждения и датчиком 14 тока якоря. Якорь 1 электродвигателя приводит во вращение механизм с моментом нагрузки т, который может прикладываться скачком (например, при входе металла в валки клети).
Регулятор частоты вращения состои (фиг. 2) из последовательно включенных сумматора 15, операционного пропорционального усилителя 16 с входным резистором 17, линейным 18 и нелинейным 19 обратных связей, а также бесконтактных ключей 20 и 21 и.peлef ного элемента 22. При этом бесконтактные ключи 20 и 21 включены ме;кду выходом операционного усилителя 16 и выводами резисторов соответственно 18 и 19, к входам управления ключей 20 и 21 подключены соответственно инверсный и прямой выходы релейного элемента 22, вход которого подключен к выходу сумматора 15. Выход операционного усилителя 16 является выходом регулятора 4 частоты вращения.
Инвертор 10 с ограничением состоит из пропорционального инвертирующего операционного усилителя 23 с входными резисторами 24 и 25 и резистором 26 обратной связи. Параллельно операционному усилителю 23 инвертора 10 включено звено 27 ограничения, которое настроено на ограничение предельно допустимого тока якоря двигателя. Выход операционного усилителя 23 является выходом инвертора 10 с ограничением.
Усилитель 11 состоит из пропорционально-дифференциального (ПЛ) операционного усилителя. 28 с входными резисторами 29 и 30, резистором 31 и конденсатором 32 обратной связи и резистором 33 помехозагдиты. Выход операционного усилителя 28 является выходом усилителя 11.
Регулятор 5 потока возбуждения состоит из интегрально-пропорционального (ИП) операционного усилителя 34 с входными резисторами 3537, резистором 38 и конденсатором 39 обратной связи, а также нелинейного преобразователя 40, образующего зaдaюD ий сигнал потока возбуждения р5 и реализующего функциональную зависимость SiaJj, вход которого подключен к задатчику 3 частоты вращения, а выход - к входу операционного усилителя 34, выход которого является выходом регулятора 51 5 noTOKJa возбуждения ( k - постоянный коэффициент; (t) - задающий сигнал скорости), Электропривод работает следующим образом. Инвертор 10 с огр аничением инвер тирует знак сигнала тока гq от дат чика 14 тока якоря, не изменяя его величины, так что на входе усилител 11. сигналы от датчика 14 тока якоря взаимно компенсируются. При этом ПД-усилитель 11 является составной частью регулятора 4 частоты, вращения и обеспечивает компенсацию элек тромагнитной постоянной времени якорной цепи электродвигателя в линейной зоне работы системы. Если то двигателя .io| достигает предельно допустимой для электродвигателя величины tq то звено ограничения 27 инвертора 10 вступает в работу и ог раничивает выходной сигнал инвбртора 10 на уровне Ц;. При этом инвер тор 10 становится задатчиком тока 1 1(ц для усилителя 11, и последний начинает выполнять функции регулято ра тока, ограничивая ток г электро двигателя на предельно допустимом уровне io,y(. Усилитель 34 регулятора 5 потока возбуждения обеспечивает в линейной зоне работы системы компенсацию постоянной времени обмотки 2 возбуждения. Задатчиком 3 частоты вращения задается величина скорости . CaJi,, которая должна поддерживаться (стабилизироваться) с высокой точно стью, т.е. действительная скорость СО электродвигателя должна быть равна заданной скорости (s)-, (C4(Oj), а отклонения д и) ()j-6o при ударных приложениях момента нагрузки .Пс должны быть минимально возможными иотрабатываться за минимально возможное время. Это способствует улучшению качества выпускаемой продукции (например, проката) бумаги и другого непрерывного материала). При отсутствии момента нагрузки () на входе регулятора 4 частоты вращения сигналы задающей и обратной связи равны (), выходной сигнал регулятора 4 - нулевой, соответственно равны нулю сигналы Afc с выхода усилителя 11 и ДЛ с. выхода усилителя 13. Задающим сиг налом( регулятора 5 потока возбуждения при этом является только сигнал с выхода задатчика 3 частоты вращения, пропущенный через линейный преобразователь 40 регулятора 5 Заданное значение потока возбулсдения .(ft -в/С-Ш где е - ЭДС электродвигателя; с - постоянная электродвигателя. При регулировании скорости Сд изменением возбуждения ф ЭДС е поддерживается постоянной (приШс 0), поэтому нелинейный преобразователь 40 реализует функциональную зависимость фз К/( При наличии момента нагрузки т заданное значение потока возбуждения t| в установившемся режиме должно быть.уменьшено на величину Лфс (в относительньпс единицах, где fc - относительная постоянная величина сопротивления цепи якОря электродвигателя) , чтобы частота вращения ui не изменилась, т.е. осталось неизменным равенство 60 (iOj. Сигнал А получается с помощью усилителя 13, который вместе с интегратором 12 образует контур, функционирую1Щ1й согласно уравнению .bool-U i де K,,,Unb коэффициент усиления и выходной сигнал усилителя 13; vi«i-vp - выходной сигнал блока 7 перемножения, пропорциональный электромагнитному моменту электродвигателя; Ъц2 - постоянная времени интегратора;1/р - символ интегрирования. Из уравнения (1) :U,i-(i -pt42(s)V(.2/к«). Если постоянную времени г принять равной инерционной постояннойj электродвигателя, т.е. 451 то числитель выражения (2) становится равным величине статического момен-. та Wf, так как vtic«m-p ai). 7 где р - символ дифференцирования. Тогда выражение (2) можно записать в виде . .U -Wc/OVt.l/M, ( , т.е. сигнал на выходе усилителя 13 i пропорционален моменту wie. При отсутствии момента нагрузки и и/1% 0, т.е. выходной сигнйл усилите ля 13 также равен нулю. Сигнал дft получается на входе регулято ра 5 потока возбуждения соответству ющим выбором сопротивления резистора 37 регулятора 5 по входу усилителя 13. При ударном приложении к электро двигателю момента нагрузки (фиг. 3) на интервале времени Оа происходит нарастание с крутизной VYi электромагнитного момента w электродвига теля до величины т,. Крутизна гп на растания момента п двигателя являет ся предельно возможной и ограничивается величиной форсировки возбуждения электродвигателя или максимальным напряжением возбудителя 6 UfM.,: vfi--CiUeM где С - конструктивная постоянная электродвигателя. Пока электромагнитный момент ю электродвигателя меньше момента нагрузки Y1e (Л1.|/У)| интервал времени OQ происходит снижение частоты вращения (jj электродвигателя и увеличение рассогласования 4.й), из уравнения (3) при w-tWc знак динамического момента (o отрицательный, ускорение электродвигателя соответственно отрицательное и имеет место , снижение 6в. В момент времени ci (фиг. 3) величина m достигает величины We, снижение скорости прекраща ется (рассогласование не увеличивается) . Для последующей отработки рассогласования л(а , достигшего к моменту времени а максимальной величины, ди намический момент должен стать положительным, чтобы обеспечить рост частоты вращения (а до первоначально величины (dj и соответственно для све дения рассогласования&щ к нулю. Таким образом, на. интервале времени аЬ Нйобход1тмо так управлять ди 8-.8 намической составляющей момента т электродвигателя, чтобы ко времени 6 полностью свести рассогласование к нулю. При этом крутизна изменения момента т должна быть предельное возможной. Чтобы управлять динамической составляющей момента электродвигателя с обеспечением предельной по быстродействию отработки рассогласования Лоа в предлагаемом электроприводе на операционный усилитель регулятора 4 частоты вращения в отличие от известного электропривода возложена функция управления только динамической составляющей момента, т.е. выходной сигнал операционного усилителя 16 регулятора 4 частоты вращения соответствует заданию динамической составляющей момента пПо,. Соответствующий величине тд задающий сигнал Д(, поступающий с выхода усилителя 11 на вход регулятора 5 потока возбуждения и изменяющий задание потока возбутадения электродвигателя, пропорционален заданию rrv в соответствии с выражением А-фст оРа (в относительных величинах) . Таким образом, результирующее изменение задающего сигнала bvf регулятора 5 потока возбуждения от усилителей 11 и 13 u(f - ДЦ) -pa{nic. пропорционально изменению полного омента m электродвигателя vwrnc Wo в процессе отработки рассогласоания iU) (интервал времени аЬ, фиг.З) арактеристика операционного усиителя регулятора 4 частоты вращеия соответствует выражению П )- SM u(d to обеспечивает управление динамиеской составляющей момента электровигателя lu оптима льным по быстроействию способом, т.е. изменение с редельно возможной крутизной т и ереключением в точке г(фиг. 3) на нижение момента rOf до нуля в точке . Характеристика операционного усиителя 16 регулятора 4 частоты враения приведена на фиг, 4. В зоне ж, т.е. при малых рассогласоваиях, характеристика соответствует
9. 1
зоне .линейности. При увеличении рассогласованияAM в точке ж харатеристика переключается и становится нелинейной (интервал зи). Последняя описьгеается функцией (6).
Переключение характеристик операционного усилителя 16 осуществляется с помощью релейного звена 22 (фиг. 2), управляющего по сигналу сумматора 15 ключами 20 и 21. При малых величинах &&i) в обратную связь операционного усилителя 16 ключом 20 вводится линейный резистор 18, при больших AW ключом 21 вводится нелинейный резистор 19 (или нелинейный преобразователь). Таким образом, вместо ИП-регулятора скорости у известного электропривода в предлагаемом электроприводе применяется пропорциональный нелинейный регулятор 4 частоты вращения, который в неустановившихся режимах управляет через поток возбуждения соответственно динамической составляющей момента тд двигателя. Применение контура, образованного усилителем 13 и интегратором 12 и управляющего через поток возбуждения соответственно статической составляющей момента iTflc,
8810
обеспечивает астатическое регулирование скорости, т.е. в установившихся режимах обеспечивает независимо от величины нагрузки равенствой йОз, или нулевую статическую ошибку.
ИП-регулятор частоты вращения (или регулятор с интегральной частью) у известного электропривода совмещает функции управления статической и динамической составляющими момента двигателя, что вызывает повьш1енную колебательность скорости при отработке рассогласования и в связи с .
этим не обеспечивает быстродействующей отработки рассогласования Д(а) при ударном приложении нагрузки.
Благодаря разделению функции по управлению потоком возбуждения соответственно статической и динамической т составляющими момента гг электродвигателя в данном элекаропри-, воде обеспечивается предельная по быстродействию отработка динамических просадок скорости при ударных приложениях нагрузки, соответственно повьш1ается точность стабилизации скорости электропривода и качество производимой продукции.



| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель, в цепь возбуждения которого включен последовательно соединенные задатчи и регулятор частоты вращения и последовательно соединенные регулятор потока возбуждения и возбудитель, a также блок перемножения и подключен ные к входам соответствующих регуля торов датчики частоты вращения и потока возбуждения, отличающийся тем, что, с целью повышения надежности и точности стабилизации частоты вращения при ударных нагрузках, в него введены последовательно соединенные инвертор с ограни чением и первый усилитель, последовательно соединенные инвертор и второй усилитель, a также датчик тока якоря, выход которого соединен с входами инвертора и первого усилителя, при этом вход инвертора связан с выходом регулятора частоты вращения, a выход первого усилителя подключен к входу регулятора потока возбуждения, третий и четвертый входы которого соединены соответственно с задатчиком частоты вращения и с выходом второго усилителя, вход которого связан с выходом датчика частоты вращения, a входы инвертора подключены к выходам второго усилителя и блока перемножения, соединенного входами с датчиками потока возбуждения и тока якоря.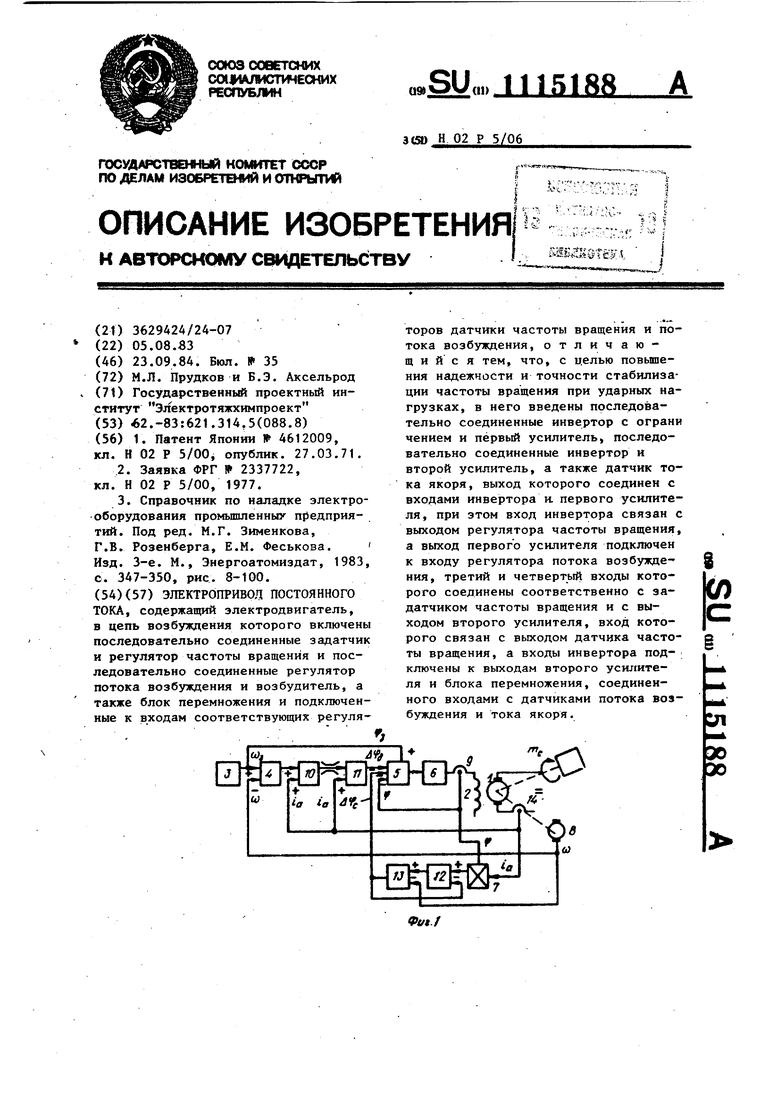
тд
и J
/
й)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Японии № 4612009, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Под ред | |||
| М.Г | |||
| Зименкова, Г.В | |||
| Розенберга, Е.М | |||
| Феськова | |||
| Изд | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М., Энергоатомиздат, 1983 с | |||
| Верхний многокамерный кессонный шлюз | 1919 |
|
SU347A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
