Изобретение относится к электротехнике и может быть использовано при построении по принципу подчиненного регулирования электроприводов наведения радиотелескопов и других механизмов, в которых обеспечивается перемещение исполнительного органа при существенном влиянии на точность упругих свойств объекта управления.
Целью изобретения является повышение быстродействия следя1цего электропривода и исключение возможности упругих колебаний при отработке изменяющихся в широких пределах задающих сигналов.
На фиг.1 представлена функциональная схема электропривода; на фиг.2 - функциональная схема задат- чйка интенсивности.
Следящий электропривод содержит электродвигатель 1 с тахогенерато- ром 2, соединенньш с исполнительным механизмом 3, датчик 4 углового положения механизма, последовательно соединенные первый измеритель 5 рассогласования, регулятор 6 положения, регулятор 7 скорости и контур 8 регулирования тока электродвигателя 1, причем выход тахогенерато- ра 2 соединен с вторым входом регулятора 7 скорости, а выход датчика
4углового положения механизма 3 содинен с вторым входом первого измертеля 5 рассогласования. Кроме того, электропривод содержит второй измеритель 9 рассогласования, переключающий элемент 10, задатчик 11 интенсивности и последовательно соединенные блок 12 вьщеления модуля с зоной нечувствительности и релейный элемент 13, причем вькод переключающего элемента 10 соединен с первым входом первого измерителя
5рассогласования, вькод датчика 4 углового положения соединен с вторым входом второго измерителя 9 рассогласования, выход которого соединен с входом блока I2 вьщеления модуля, выход релейного элемента
13 соединен с управляющим входом переключающего элемента 10, выход задатчика 11 интенсивности соединен с первым входом переключающего элемента 10, а выход источника 14 за дающего сигнала соединен с первым входом второго измерителя 9 рассогласования, входом задатчика 1 ин
5
0
0
тенсивности и вторым входом переключающего элемента 10.
Задатчик 11 интенсивности (фиг.2) состоит из последовательно соеди- неннх первого сумматора 15, нелинейного блока 16, блока 17 ограничения, второго сумматора 18, релейного элемента 19, первого 20 и второго 21 интеграторов, причем выход первого интегратора 20 соединен с вторым входом второго, сумматора 18, а выход второго интегратора 21, являясь выходом задатчика интенсивности, соединен с вторым входом первого сумматора 15.
Следящий электропривод работает следующим образом.
При отработке малых задающих сигналов, когда рассогласование меж- ду задающим с игналом и истинным значениями перемещения, получаемое на выходе второго измерителя 9 рассогласования таково, что при его от5 работке ни ток якоря, ни скорость не должны достигать предельно допустимых значений (ограничений), задающий сигнал через переключающий элемент 10 поступает непосредственно на вход первого измерителя 5 рассогласования. Этот режим обеспечивается соответствующим выбором величины зоны нечувствительности блока 12. При отработке задающих сигналов, которые в следящем электроприводе без задающего устройства приводят к ограничению тока и скорости электродвигателя, а вданном электроприводе на выходе второго измерителя 9 рассогласования появляется напряжение, превьшающее величину зоны нечувствительности блока 12, на выходе блока 12. При этом появляется напряжение, которое приводит к
5 переключению релейного элемента 13, напряжение с выхода релейного элемента 13 поступает на направляющий . вход переключающего элемента 10, который подключает к первому входу
g первого измерителя 5 рассогласования выход задатчика 11 интенсивности. Сигнал на выходе задатчика 11 интенсивности задает такой темп изменения угла, при котором отсутствуg ет ограничение регулятора скорости и корректирующие связи не отключаются, .что позволяет электроприводу при отработке больших и средних рассогласований эффективно демпфировать
5
0
упругие колебания механизма. Задат- чик 11 интенсивности работает следующим образом: на первый интегратор 20, постоянная времени которого выбирается равной механической постоянной времени электропривода, подается сигнал с релейного элемента 19. Величина напряжения релейного элемента 19 выбирается несколько меньше величины напряжения ограничения регулятора 7 скорости. Таким образом скорость нарастания выходного напряжения первого интегратора 20 в замкнутом отрицательной обратной связью контуре, образованным первым сумматором 18, релейным элементом 19 и первым интегратором 20, не зависит от уровня сигнала на входе релейного элемента 19 и соответствует такому темпу нарастания скорюсти электродвигателя 1 , при котором не происходило бы ограничения регулятора 7 скорости.Величина напряжения ограничения блока 17 ограничения соответствует предельно -допустимому значению скорости вращения электродвигателя I, а нелинейный блок 16 должен реализовьшать зависимость
ииэ
2/0 а - UJ4 /
М5
ign , /,
где Т
М5
и/ и
ги
механическая постоянная времени электропривода; задающий сигнал; выходное напряжение второго интегратора 21, являющееся выходным сигналом
задатчика интенсивности При указанном выборе параметров входящих в задатчик интенсивности элементов сигнал на его выходе задает такой район перемещения механизма 3, при котором отсутствует ограничение скорости и тока электродвигателя. Использование данного задатчика обеспечивает.отсутствие перерегулирования и минимизацию времени согласования.
Формула изобретения
Следящий электропривод, содержащий электродвигатель с тахогенерато- ром, соединенный с исполнительным механизмом, датчик угловогр положения механизма, источник задающего сигнала и последовательно соединен5
0
ные первьй измеритель рассогласования, регулятор положения, регулятор скорости и контур регулирования тока
электродвигателя, причем выход тахо- генератора соединен с вторым входом регулятора скорости, выход датчика углового положения механизма соединен с вторым входом первого измеритеQ ля рассогласования, о т л и ч а ю- щ и и с я тем, что, с целью повы«- шения быстродействия и точности отработки изменяющихся в широких пределах задающих сигналов, в него дополнительно введены второй измери-. тель рассогласования, переключающий элемент, задатчик интенсивности, по7 следовательно соединенные блок вьще- ления модуля с зоной нечувствительности и релейный элемент, причем выход переключающего элемента соединен с первым входом первого измерителя рассогласования, вькод датчика углового положения механизма соеди- нен с
0
5
Б
0
5
0
вторым входом второго измерителя рассогласования, выход которого соединен с входом блока выделения модуля с зоной нечувствительности, выход релейного элемента соединен с управляющим входом переключающего элемента, выход задатчика интенсивности соединен с первым входом переключающего элемента, а выход источника задающего сигнала соединен с первым входом второго измерителя рассогласования, входом задатч.шса интенсивности и вторым входом переключающего элемента, причем задатчик интенсивности состоит из последовательно соединенных первого сумматора, нелинейного блока, блока ограничения, второго сумматора, второго релейного элемента, первого и второго интеграторов, выход первого интегратора соединен с вторым входом второго сумматора, а выход второго интегратора, являясь выходом задатчика интенсивности, соединен с вторым входом первого сумматора, при этом нелинейных блок реализует следующую зависимость:
и„, «ign /cf.-U,,/. 55 где Т... - механическая постоянная
о времени электропривода; (. - задающий сигнал; и - выходной сигнал задатчика интенсивности.
Фиг.2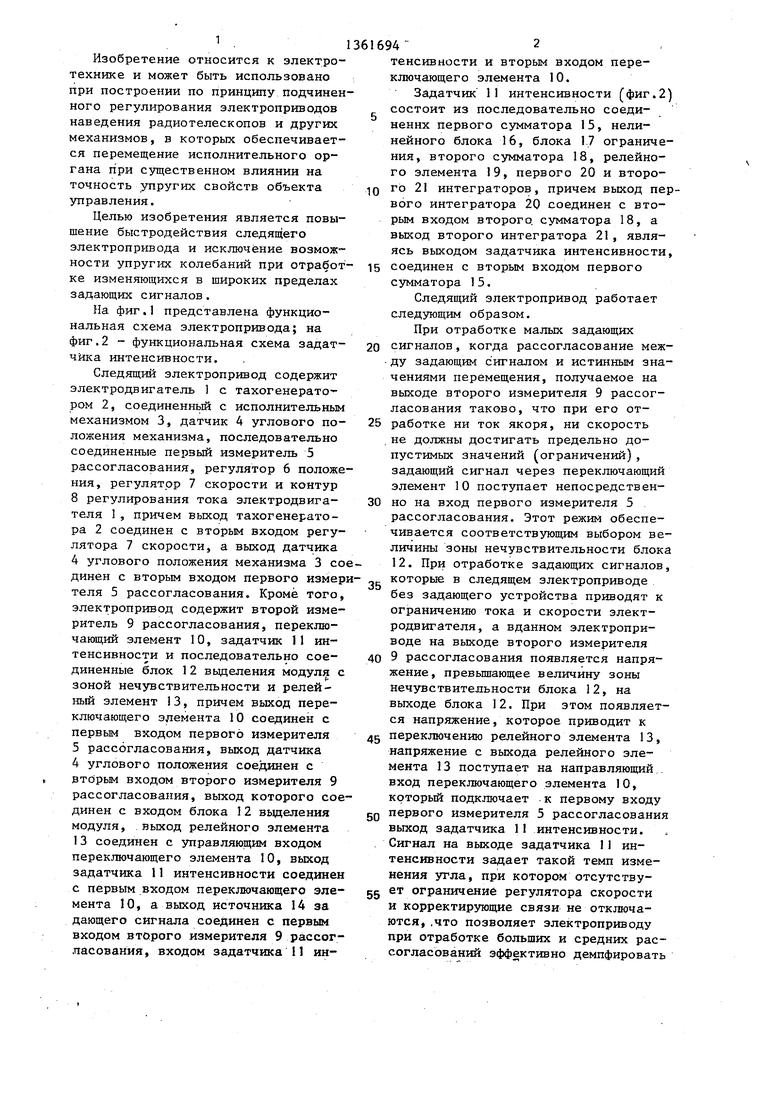

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Устройство для управления электроприводом | 1984 |
|
SU1241395A1 |

Изобретение относится к электротехнике и может быть использовано, при построении систем подчиненного регулирования. Целью изобретения является повьшение быстродействия следящего, электропривода и исключение возможности упругюс колебаний при отработке изменяющихся в широких пределах задающих сигналов. Устройство содержит источник задающего сигнала 14, выход которого соединен с вторым измерителем расг согласования 9, задатчиком интенсивности 1I и переключающим элементом lOj Управляющий вход переключающего элемента ГО соединен с вы- . ходом релейного элемента 13. Вход релейного элемента 13 через блок 12 соединен с выходом второго измерителя рассогласования 9. В данном устройстве задатчик интенсивности 1I обеспечивает перемещение механизма по закону, близкому к оптимальному, обеспечивающему минимизацию времени согласования. 2 ил. (Л с 12 /5 00 О5 в ;о Фи./
| Решлин Б.И | |||
| Мипольский Д.С | |||
| «Проектирование и наладка систем под- | |||
| чиненного регулирования электроприводов | |||
| -М.: Энергия, 1975, с.153 | |||
| Там же, с.149. |
