СА:
00
Изобретение относится к электротехнике и может быть использовано для управления электродвигателем двойного питания, предназначенного для привода тяги подвижного состава, а также других механизмов и машин с тяговыми нагрузочными характеристиками.
Известен способ управления электродвигателем двойного питания, при котором подают напряжение переменной амплитуды и частоты в статорные и роторные обмотки от различных источников электроэнергии, контролируют скорость, угловое положение ротора, токи ротора и статора, сравнивают измеренные параметры режима с заданными и по результатам сравнения регулируют автономно развиваемый электромагнитный момент и скорость в заданном диапазоне flj
Недостатком известного способа является сложность его реализации и обеспечения высоких энергетических показателей.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ управления двигателем двойного питания, при котором подают синусоидальное напряжение в ротор, подают синусоидальное напряжение в -статор, контролируют амплитуду и частоту тока статора, амплитуды фазных напряжений и токов ротора, регулируют амплитуду и частоту тока статора, регулируют амплитуды напряжения и тока ротора, разгоняют ротор до заданной частоты вращения t2
Недостатком способа является сложность реализации при одновременном обеспечении высоких энергетических показателей.
Цель изобретения - упрощение способа управления при обеспечении высоких энергетических показателей за счет увеличения коэффициента мощности.
Указанная цель достигается тем, что при управлении двигателем двойного питания подают синусоидальное напряжение в ротор, синусоидальное напряжение в статор, контролируют амплитуду и частоту тока статора, амплитуды фазных напряжений и токов ротора, регулируют амплитуду и частоту тока статора, регулируют амплитуды напряжения и тока ротора, разгоняют ротор до заданной частоты вращения, причем в ротор подают синусоидальное напряжение фиксированной частоты и амплитуды, необходимой величины для обеспечения комМутации тока статора, при увеличени тока статора контролируют увеличение фазового сдвига между напряжением ротора постоянной амплитуды и током ротора до четверти периода
синусоидального напряжения ротора фиксированной частоты и при достижении его четверти периода синусоидального напряжения ротора, увеличивают амплитуду напряжения pjotopa до величины, необходимой для
уменьшения фазового сдвига между напряжением и током ротора до величииы меньшей, четверти периода напряжения ротора.
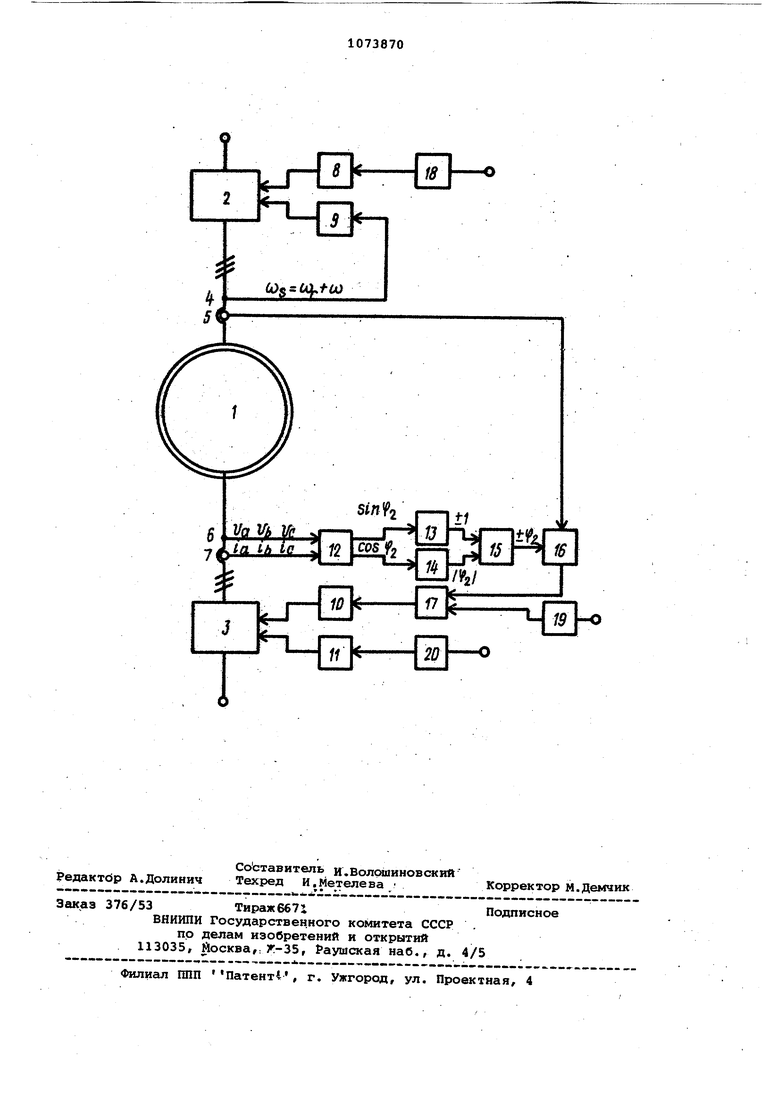
0 На чертеже изображена функциональная схема устройства для осуществления способа управления двойного питания.
Устройство содержит асинхронный
5 двигатель с фазным ротором 1, преобразователь частоты статора 2, преобразователь частоты ротора 3, датчик напряжения статора 4, датчик тока статора 5, датчик напряжения ротора 6, датчик тока ротора 7, блок управления выпрямительным звеном преобразователя частоты статора 8, блок управления инверторным |звеном преобразователя частоты статора 9, блок управления выпрямительным звеном преобразователя частоты ротора 10, блок управления инверторным звеном преобразователя частоты ротора 11, блок выделения угла сдвига фаз между напряжени0 ем и током ротора 12, релейный элемент 13, функциональный блок 14, блок произведения 15, блок коммутации положительной обратной связи по току статора 16, регулятор ам5 плитуды напряжения ротора 17, задатчик амплитуды напряжения статора 18, задатчик фиксированной г1мплитуды напряжения ротора 19, задатчик фиксированной.частоты 20 на0 пряжения ротора.
В процессе осуществления способа управления двигателем двойного питания устройство: функционирует следующим образом.
5 На силовые входы преобразователей частоты статора 2, ротора 3 и блоков управления подают напряже- . ния питания. От задатчика фиксиро:ванной частоты ротора 20 (задаюQ щего постоянную частоту напряжения питания ротора порядка 3-5 Гц) через блок управления инверторным звеном 11 преобразователя частоты ротора 3 подают управлягацие импульсы на его тиристоры. Одновременно от датчика напряжения статора 4 через блок 9 управления инв-ерторным звеном преобразователя частоты статора 2 импульсы управления, синхронизированные с напряжением
О обмотки статора двигателя 1, подают с некоторым углом опережения на тиристоры ведомого инвертора преобразователя частоты статора 2, коммутация тиристоров которого
5 производится ЭДС статора. В начальный момент времени амплитуда и частота напряжения питания ротора задаются, исходя из условия обеспечения коммутации тока статора, протекающего через тиристоры ведомого инвертора, коммутируемые ЭДС, наведенной в статоре неподвижного электродвигателя. Ксяимутация инвертора преобразователя частоты 2 обеспечивает протекание тока по обмоткам статора, а следовательно, / и образование рабочего магнитного потока в зазоре, благодаря чему возникает электромагнитный момент, обеспечивающий преодоление момента нагрузки на валу, например стопорного момента трогания неподвижного состава. Это позволяет развить необходимый для трогания с места состава электромагнитный момент, при неподвижном роторе и обеспечить плавный разгон. При вращении ротора в обмотке статора наводится ЭДС частоты ш равной сумме частот напржения питания ;Wv и вращения ротора «А, с увеличением развиваемого момента на валу двигателя при постоянных величинах частоты и напряжения питания ротора изменяется соотншение между напряжением ротора и ЭД С датчиков 6 и 7 соответственно фазрые. напряжения Uoi/fi, 1 фазные токи 1 д I i , Ij. ротора поступают на блок выделения угла сдвига фаз 12, который формирует синусоидальные напряжения единичной амплитуды, пропорциональные сое и i ° ответственно поступающие на входы релейного элемента 13 и фуцкционального блока 14. В релейном элементе 13 образуется ступенчатое напряжение единичной амплитуды, положительный знак которого соответствует в двигательном режиме машины положительному значению угла /г от нуля до четверти периода, а отрицательный знак - отрицательному значению угла 2 более четверти периода. Функциональный блок 14 по значению тригонометрической функции угла, например косинусу, вычисляет его значение по абсолютной величи-, не ((2.Ь - выхода блока произведения 15 двухполярный сигнал поступает на вход блока 16 включения обратной связи по току статора, приводящей к пропорциональному возрастанию напряжения, а значит и тока ротора. Блок 16 включает обратную связь потоку статора только при достижении фазового сдвига между напряжением и током ротора четверти
периода напряжения ротора, что эквивалентно смене знака напряжения на выходе блока 15 с плюса на минус,т.е. только при отрицательном значении угла 2. Это соответствует
0 изменению направления мощности в роторной цепи через преобразователь частоты ротора 3. Положительное значение угла /2 соответствует- потреблению роторсяи мощности от сети, а от5 рицательное значение угла fi/соответствует рекуперации энергии через роторную цепь в сеть. Таким образом, введение данной обратной связи по току статора исключает возникновеQ ние режима рекуперации через роторную цепь. При работе двигателя в генераторном режиме рекуперации энергия осуществляется через статорную цепь, т.е. преобразователь частоты
, 2, устройство которого обеспечивает режим рекуперации.
I
После включения блока 16 на вход
блока 17 поступает напряжение, пропорциональное току статора, которое
0 суммируется с заданием амплитуды
напряжения ротора, усиливается и поступает на вход блока управления . выпрямительным звеном преобразователя .частоты ротора. Это приводит
5 к возрастанию амплитуды напряжения ротора, в результате чего исключается возникновение режима рекуперации в роторной цепи.
Таким образом, двигатель двой0 ного питания работает в режиме вентильного двигателя, возбуждаемого переменным током, в отличие от классического вентильного двигателя с возбуждением постоянным током или от постоянных магнитов.
5
Применение данного изобретения позволяет упростить способ управле ния двигателем двойного питания при обеспечении высоких энергетических показателей, в частности позволяет
0 существенно упростить устройство преобразователя частоты в роторной цепи и улучшить использование активных материалов электродвигас теля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427069C1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Система возбуждения асинхронизированной синхронной машины | 2021 |
|
RU2761246C1 |
СПОСРБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ, при котором подают синусоидальное напряжение в ротор, синусовдапьнбе напряжение в статор, контролируют амплитуду и.частоту тока статора, амплитуды фазных напряжений и токов ротора, регулируют амплитуду и частоту тока статора, регулируют амплитуды напряжения и тока ротора. разгоняют ротор до заданной частоты вращения, отличающий с я тем, что, с цепью упрощения способа при обеспечении высоких энергетических показателей за счет увеличения коэффициента мощности, в ротор подают синусоидальное напряжение фиксированной частоты и амплитуды, необходимой величины для обеспечения коммутации тока статора, при увеличении тока статора контролируют увеличение фазового сдвига между напряжением ротора постоянной амплитуды и током ротора до четверти периода синусоидального напряжения ротора фиксиi рованной частоты и при достижении им четверти периода синусоидашьного (О С напряжения ротора увеличивают амплитуду напряжения ротора до величины, необходимой для уменьшения фазового сдвига меж;с у напряжением и током ротора до величины, меньшей четверти периода напряжени я ротора f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1980 |
|
SU928586A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 4295084, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
