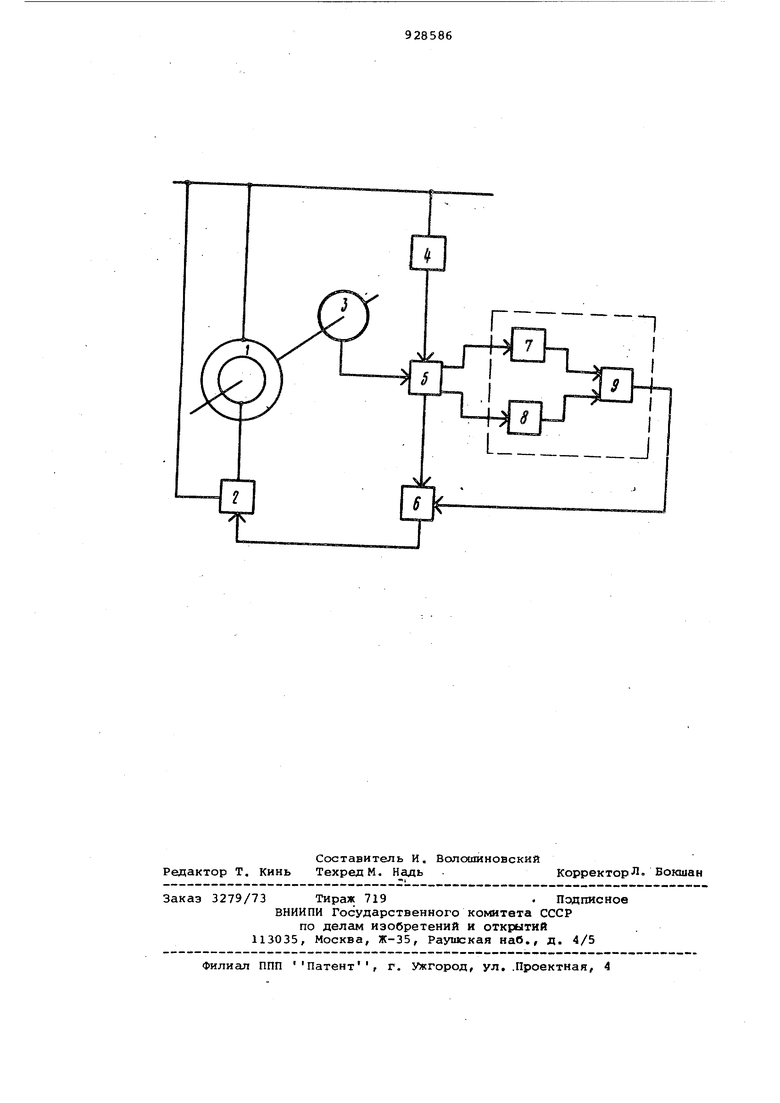
тоты, один вход которого соединен с выходом датчика углового положения ротора, а другой его вход соеди нен с датчиком напряжения статора, введены релейный элемент, функциой(альный блок и блок умножения, при этом блок вьщеления низкой частоты рнабжен вторым и третьим выходами, а другой вход блока регулирования Соединен с выходом блока умножения, входы которого соединены соотватстйенно с выходами релейного элемента я функционального блока, входы кото рых соединены соответственно со вто рым и третьим выходами блока выделе ния низкой частоты. На чертеже изображена схема устройства. Обмотка ротора электродвигателя 1 соединена с выходом тиристорного преобразователя частоты 2. Датчик 3 углового положения ротора и датчик напряжения статора своими выходами соединены с входами блока 5 выделения низкой частоты, первый выход которого соединен с первым входом блока б регулирования. Второй и тре тий выходы блока 5 соединены соответственно с входами релейного элемента 7 и функционального блока 8, выходы которых соединены со входами блока 9 умножения, выход которого соединен со вторым входом блока б. Устройство функционирует следующим образом. Датчик 3 углового положения рото ра формирует сигналы, пропорциональ ные синусу и косинусу углового положения ротора, которые подаются на первый вход блока 5. Датчик 4 на пряжения статора формирует сигналы, пропорциональные синусу и косинусу углового положения вектора напряжения статора, которые подаются на вт рой вход блока. 5. Блок 5 формирует сигналы, пропорциональные синусу и косинусу угловой разности положений ротора и вектора напряжения статора, которые подаются на первый вход блока 6. Кроме того, сигнал пропорциональный синусу угловой разности, поступает на вход релейного элемента 7, в котором формируется ступенчатый сигнал, совпадающий по знаку с нечетной входной синусоидальной функцией, и подается на пер вый, вход блока 9. Сигнал, пропорцио надьный косинусу угловой разности, поступает на вход функционального блика 8, в котором формируется сигн пропорциональный абсолютной величин угловой разности, и подается на вто рой вход блока 9. На выходе блока 9 формируется сигнал, пропорциональны угловой.разности, со знаком, соЗтветс.твующим режиму работы электродвигателя 1. Сигнал с выхода блока 9 поступает в блок 6 регулирования, в котором осуществляется коррекция угловой разности электродвигателя 1 посредством управляющего воздействия на тиристорный преобразователь частоты 2. Последний, в свою очередь, осуществляет силовое воздействие на электродвигатель 1, обеспечивающее наперед заданное положение ротора относительно вектора напряжения статора. Эффект от практической реализации изобретения состоит в повышении устойчивости при работе электродвигателя с нулевым скольжением ротора в режимах глубокого потребления реактивной мощности, что, в конечном счете, повышает надежность. Формула изобретения Устройство для управления асинхронным электродвигателем с фазным ротором, содержащее тиристорный преобразователь частоты, выход которого соединен с обмоткой ротора электродвигателя, силовой вход снабжен выводами для подключения к источнику питания, а его управляющий вход соединен с выходом блока регулирования, один вход которого соединен с первым выходом блока выделения низкой частоты, один вход которого соединен с выходом датчика углового положения ротора, а другой его вход соединен с датчиком напряжения статора, обмотка статора электродвигателя снабжена выводами для подключения к источнику питания, отличающеее я тем, что, с целью повышения надежности, в него введены релейный элемент, функциональный блок и блок, умножения, при этом блок выделения низкой частоты снабжен вторым и третьим выходами, а другой вход блока регулирования соединен с выходом блока умножения, входы которого соединены соответственно с выходами релейного эпемента и функционального блока, входы которых соединены соответственно со вторым и третьим выходами блока выделения низкой частоты. Источники информации, принятые ВО внимание при экспертизе 1.Патент США № 3859578, кл. И 02 Р 7/36, 1975. 2.Авторское свидетельство СССР № 523501, кл. Н 02 Р 7/42, 28.08.72,

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Устройство для управления электродвигателем переменного тока в следящем режиме | 1980 |
|
SU944047A1 |