(Л
СП СП
оо to
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Электропривод | 1983 |
|
SU1167688A1 |
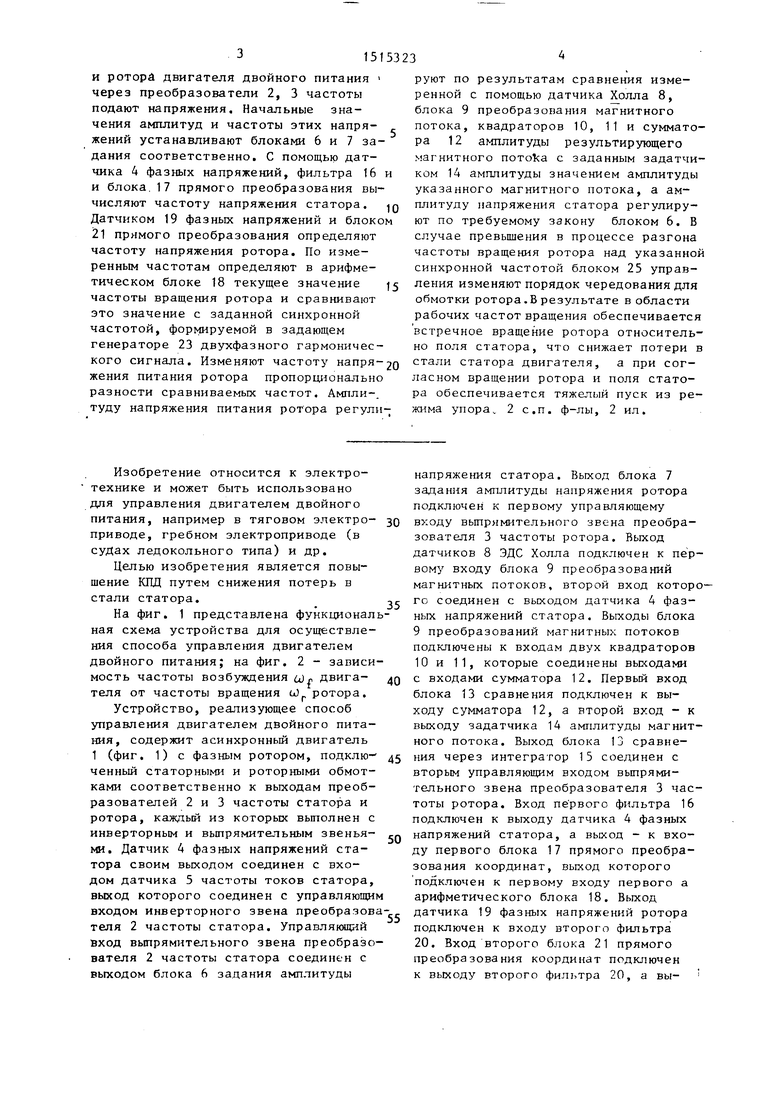
Изобретение относится к электротехнике и может быть использовано в судах ледокольного типа. Целью изобретения является повышение КПД путем снижения потерь в стали статора. В способе управления двигателем двойного питания на обмотки статора и ротора двигателя двойного питания через преобразователи 2,3 частоты подают напряжения. Начальные значения амплитуд и частоты этих напряжений устанавливают блоками 6 и 7 задания соответственно. С помощью датчика 4 фазных напряжений, фильтра 16 и блока 17 прямого преобразования вычисляют частоту напряжения статора. Датчиком 19 фазных напряжений и блоком 21 прямого преобразования определяют частоту напряжения ротора. По измеренным частотам определяют в арифметическом блоке 18 текущее значение частоты вращения ротора и сравнивают это значение с заданной синхронной частотой, формируемой в задающем генераторе 23 двухфазного гармонического сигнала. Изменяют частоту напряжения питания ротора пропорционально разности сравниваемых частот. Амплитуду напряжения питания ротора регулируют по результатам сравнения измеренной с помощью датчика Холла 8, блока 9 преобразования магнитного потока, квадраторов 10,11 и сумматора 12 амплитуды результирующего магнитного потока с заданным задатчиком 14 амплитуды значением амплитуды указанного магнитного потока, а амплитуду напряжения статора регулируют по требуемому закону блоком 6. В случае превышения в процессе разгона частоты вращения ротора над указанной синхронной частотой блоком 25 управления изменяют порядок чередования для обмотки ротора. В результате в области рабочих частот вращения обеспечивается встречное вращение ротора относительно поля статора, что снижает потери в стали статора двигателя, а при согласном вращении ротора и поля статора обеспечивается тяжелый пуск из режима упора. 2 с.п.ф-лы, 2 ил.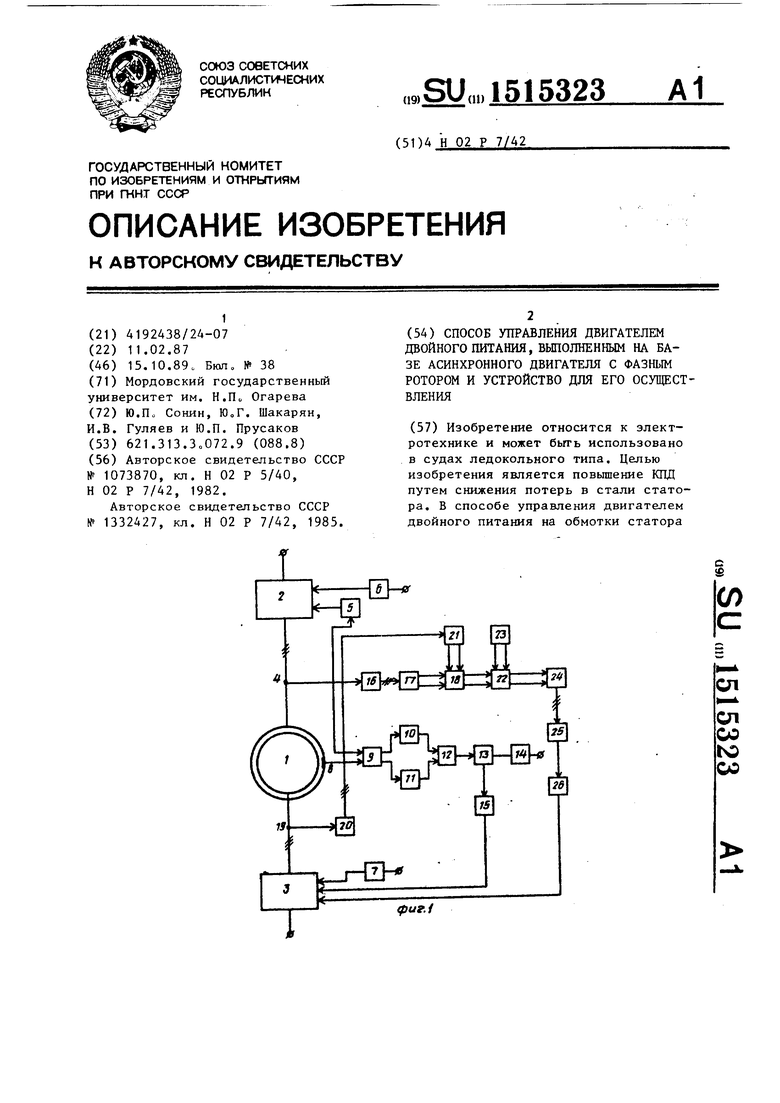
fJUf.1
315153
и ротора двигателя двойного питания через преобразователи 2, 3 частоты подают напряжения. Начальные значения амплитуд и частоты этих напряжений устанавливают блоками 6 и 7 задания соответственно, С помощью датчика 4 фазных напряжений, фильтра 16 и и блока.17 прямого преобразования вычисляют частоту напряжения статора. Q Датчиком 19 фазных напряжений и блоком 2 прямого преобразования определяют частоту напряжения ротора. По измеренным частотам определяют в арифметическом блоке 18 текущее значение 5 частоты вращения ротора и сравнивают это значение с заданной синхронной частотой, формируемой в задающем
руют по результатам сравнения измеренной с помощью датчика Холла 8, блока 9 преобразования магнитного потока, квадраторов 10, 11 и сумматора 12 амплитуды результирующего магнитного потока с заданным задатчи- ком 1ч амплитуды значением амплитуды указанного магнитного потока, а амплитуду напряжения статора регулируют по требуемому закону блоком 6. В случае превышения в процессе разгона частоты вращения ротора над указанной синхронной частотой блоком 25 управления изменяют порядок чередования для обмотки ротора.В результате в области рабочих частот вращения обеспечивается встречное вращение ротора относительно поля статора, что снижает потери в
генераторе 23 двухфазного гармонического сигнала. Изменяют частоту напря-2остали статора двигателя, а при сог- жения питания ротора пропорциональноласном вращении ротора и поля стато- разности сравниваемых частот. Ампли-.ра обеспечивается тяжелый пуск из ре- туду напряжения питания ротора регули-жима упора. 2 с.п. ф-лы, 2 ил.
Изобретение относится к электротехнике и может быть использовано для управления двигателем двойного питания, например в тяговом электро- приводе, гребном электроприводе (в судах ледокольного типа) и др.
Целью изобретения является повышение КПД путем снижения потерь в стали статора.
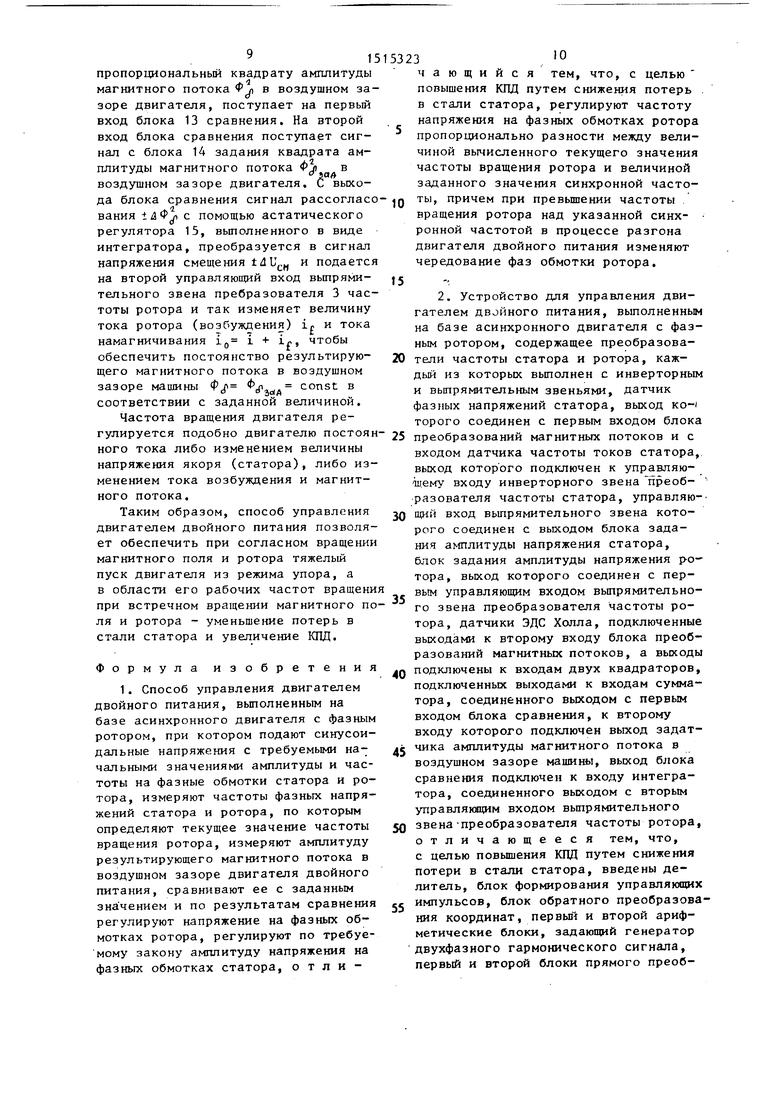
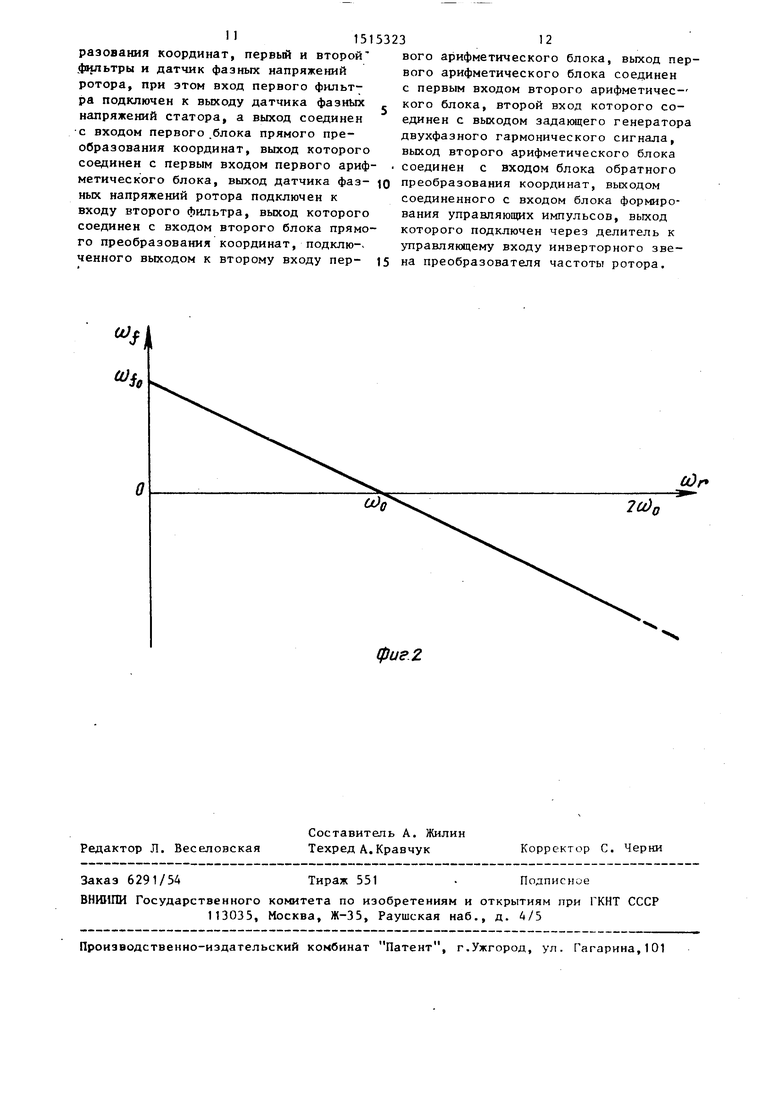
На фиг. 1 представлена функционалная схема устройства для осуществления способа управления двигателем двойного питания; на фиг. 2 - зависимость частоты возбуждения cUf, двига- теля от частоты вращения Ы ротора.
Устройство, реализующее способ управления двигателем двойного питания, содержит асинхронный двигатель 1 (фиг. 1) с фазным ротором, подклю- ченный статорными и роторными обмотками соответственно к выходам преобразователей 2 и 3 частоты статора и ротора, каждый из которых выполнен с инверторным и выпрямительным звеньями. Датчик А фазных напряжений статора своим выходом соединен с входом датчика 5 частоты токов статора, выход которого соединен с управляюш 1
входом инверторного звена преобразователя 2 частоты статора. Управлякндий вход выпрямительного звена преобразователя 2 частоты статора соеди}1ен с выходом блока 6 задания амплитуды
руют по результатам сравнения измеренной с помощью датчика Холла 8, блока 9 преобразования магнитного потока, квадраторов 10, 11 и сумматора 12 амплитуды результирующего магнитного потока с заданным задатчи- ком 1ч амплитуды значением амплитуды указанного магнитного потока, а амплитуду напряжения статора регулируют по требуемому закону блоком 6. В случае превышения в процессе разгона частоты вращения ротора над указанной синхронной частотой блоком 25 управления изменяют порядок чередования для обмотки ротора.В результате в области рабочих частот вращения обеспечивается встречное вращение ротора относительно поля статора, что снижает потери в
стали статора двигателя, а при сог- асном вращении ротора и поля стато- ра обеспечивается тяжелый пуск из ре- жима упора. 2 с.п. ф-лы, 2 ил.
5
о
0
5
0
5
напряжения статора. Выход блока 7 задания амплитуды напряжения ротора подключен к первому управляющему входу выпрямительного звена преобразователя 3 частоты ротора. Выход датчиков 8 ЭДС Холла подключен к первому входу блока 9 преобразований магнитных потоков, второй вход которого соединен с выходом датчика 4 фазных напряжений статора. Выходы блока
9преобразований магнитных потоков подключены к входам двух квадраторов
10и 11, которые соединены выходами с входами сумматора 12. Первый вход блока 13 сравнения подключен к выходу сумматора 12, а второй вход - к выходу задатчика 14 амплитуды магнитного потока. Выход блока 13 сравнения через интегратор 15 соединен с вторым управляющим входом выпрямительного звена преобразователя 3 частоты ротора. Вход первого фильтра 16 подключен к выходу датчика 4 фазных напряжений статора, а выход - к входу первого блока 17 прямого преобразования координат, выход которого подключен к первому входу первого а арифметического блока 18. Выход датчика 19 фазных напряжений ротора подключен к входу второго фильтра
515
ход - к втором входу первого арифметического блока 18, Первый вход второго арифметического блока 22 соединен с выходом первого арифметического блока 18, а второй вход - с выходом задающего генератора 23 двухфазного гармонического сигнала. Выход второго арифметического блока 22 подключен к входу блока 24 обратного преобразования координат, который соединен с входом блока 25 формирования управляющих импульсов. Вход делителя 26 подключен к выходу блока 25 формирования управляющих импульсо а выход - к управляющему входу ин- верторного звена преобразователя 3 частоты ротора,
В продессе осуществления способа управления двигателем двойного питания устройство функционирует следующим образом.
На силовые входы преобразователей 2 и 3 частоты статора и ротора и входы соответствуюаа1х блоков управления подают напряжение питания.
От сигналов блоков 6 и 7 задания амплитуд напряжений статора и ротора начинают работать выпрямительные звенья соответственно преобразователей 2 и 3 частоты статора и ротора.
В первый момент сигналы управления инверторными звеньями преобразователей частоты статора и ротора отсутствуют. Соответственно, сигнал на первом входе второго арифметического блока 22 имеет нулевую величину. На второй вход второго арифметического блока 22 подают сигнал с выхода задающего генератора 23 двухфазного гармонического сигнала требуемой синхронной частоты . 2). С выхода второго арифметического блока 22 сигнал без изменения поступает на блок 24 обратного преобразования координат. После прохождения через формирователь 25 импульсов управления и делитель 26 сигчал управления поступает на управляющий вход ин- верторного звена преобразователя 3 частоты ротора. Частота сигнала управления с выхода делителя 26 в начальный момент равна
и)„ Wn -;;-,
to 1
где К - коэффициент деления делителя 26.
3
По обмотке неподвижного ротора начинает протекать переменньш трехфазный ток требуемо частоты Ыг ,
о
в результате чего в обмотке статора наводится ЭДС той же частоты, т.е U) Wr. Сигнал с выхода датчика 4
о
фазных напряжений статора поступает на датчик 5 частоты токов статора,
который формирует управляющие сигналы для инверторного звена преобразователя 2 частоты статора. По обмотке статора начинает протекать пе- ременньй трехфазный ток с частотой
uJ JUJ f . Сигналы с датчиком 4 и 19 фазных напряжений статора и ротора поступают соответственно на фильтры 16 и 20, которые вьделяют первые гармоники напряжений, совпадающие по
фазе с напряжениями на обмотках. С вькодов фильтров сигналы поступают соответственно на входы первого 17 и второго 21 блоков прямого преобразования координат. С выходов указанных блоков двухфазные гармонические сигналы поступают соответственно на первый и второй входы первого арифметического блока 18, в котором реализуются выражения:
sinu t cosa)jt - coswt-sinujpt
sin (to -u;)t sinuYt;
35
COSIJ t COSUJft - SinWt SinUUt
cos(a) -u),,)t .
где uJ CO - CO г угловая частота
вращения ротора. Так как при неподвижном роторе частоты напряжений статора и ротора
равны со u)f, то частота двухфазного гармонического сигнала на выходе пер- вого арифметического олока 18 равна нулю. Двухфазный гармонический сигнал частотой Ыг U) - (jj (при неподвижном роторе частота UJ,. 0) поступает на первый вход второго арифметического блока 22. Во втором арифметическом блоке двухфазные гармонические сигналы с выходов задающего генеатора двухфазного гармонического сигнала 23 частотой со и первого арифметического блока 18 частотой ы преобразуются согласно вьфажениям:
costOpt - costOgt-riinuj t
sin(Uo-4)
oscwot-cosoJ t - sincOpt cos(Uo-t )t.
При неподвижном роторе сигнал с выхода второго арифметического блока 22 повторяет сигнал с выхода задающего генератора двухфазного гармонического сигнала 23.
Частота о/ с задается определенной величины в зависимости от требуемого диапазона регулирования частоты вращения ротора и является частотой перехода на встречное вращение магнитного поля и ротора.
При неподвижном роторе по обмоткам статора и ротора протекает переменный трехфазный ток, который создает в обмотках статора и ротора вращающиеся магнитные поля. При вращении магнитного поля статора в одном направлении и с одинаковой скоростью с магнит ным полем ротора поля взаимодействуют между собой, создавая вращающий момент. Когда последний превысит момент сопротивления нагрузки на валу, ротор двигателя начнет вращаться. С выхода датчика 5 частоты токов статора снимается после этого сигнал с частотой, равной сумме или разности частот вращения и питания ротора, т.е.
U) Uf. t,
обеспечивающей одинаковую частоту вращения магнитных полей статора и ротора.
Регулирование амплитуды выходного напряжения преобразователя 2 частоты статора, а значит,и частоты вращения ротора осуществляется при помощи блока 6 задания амплитуды напряжения статора.
Когда ротор начинает вращаться, сигнал с частотой oj с выхода датчика фазных напряжений статора поступает на вход первого фильтра 16 и далее на вход первого блока 17 прямого преобразования координат. Таким образом, на первый вход первого арифметического блока 18 поступает двухфазный гармонический сигнал с частотой ы , а на второй вход - с частотой и)(фиг. 2).
С выхода первого арифметического блока 18 сигнал с частотой вращения ротора поступает на первый вход BTO-I рого арифметического блока 22, с выхода которого получаем сигнал с частотой,равной разности частот задающегог нератора двухфазного гармонического напряжения оО и частоты вращения tJ.
После обратного преобразования в блоке 24 обратного преобразования координат и прохождения через формирователь 25 управляющих импульсов и делитель 26 сигнал управления поступает на управляющий вход инвертор- ного звена преобразователя 3 частоты ротора. Частота напряжения ротора to теперь равна
u).-w,
U)j
5
0
5
0
5
0
5
0
5
С увеличением частоты вращения ротора U) частота напряжения ротора а, уменьшается (фиг. 2).
Если WP - , трехфазный синусоидальный сигнал с выхода блока 24 обратного преобразования координат имеет прямое чередование фаз. В момент равенства частот ujp ш , частота выходного сигнала блока 24 обратного преобразования координат равна нулю - по обмотке ротора течет постоянный ток. Когда Ыд- и), один из сигналов с выхода второго арифметического блока 22, а именно sin(u;Q-Wf,)t, меняет знак .Это приводит к изменению чередования фаз с выхода блока 24 обпатного преобразования координат на обратное, что обеспечивает изменение направления вращения магнитного поля ротора двигателя (встречно направлению вращения ротора) .
При этом результирующее магнитное поле в воздушном зазоре машины вращается с частотой 10 и) р - и)., т.е. меньшей, чем при согласном вращении. В результате чего уменьшаются потери в стали статора и увеличивается КПД двигателя.
В электроприводе имеется автоматическая система поддержания постоянства результирующего магнитного потока в воздушном зазоре двигателя. Выходные сигналы с датчиков ЭДС Холла 8, пропорциональные величинам магнитных потоков р воздушного зазора по осям фаз обмоток статора, преобразуются с помощью блока 9 преобразований магнитных потоков в составляющие yjv , .t/ нУ-тевой частоты, представленные в осях X, У, синхронно вращающихся с полем двигателя. После возведения в квадрат составляющих магнитного потока в квадраторах 10 и 11 и суммирования их в сумматоре 12 выходной сигнал с п(1следнего.
1
пропорциональный квадрату амплитуды магнитного потока Фп в воздушном зазоре двигателя, поступает на первый вход блока 13 сравнения. На второй вход блока сравнения поступает сигнал с блока 14 задания квадрата амплитуды магнитного потока Фл в
JOA
воздушном зазоре двигателя. С выхода блока сравнения сигнал рассогласования с помощью астатического регулятора 15, выполненного в виде интегратора, преобразуется в сигнал напряжения смещения и подается на второй управляющий вход выпрямительного звена пребразователя 3 частоты ротора и так изменяет величину тока ротора (возбуждения) ir и тока намагничивания (, i + io, чтобы обеспечить постоянство результирующего магнитного потока в воздушном зазоре машины Ф cP. const в соответствии с заданной величиной.
Частота вращения двигателя регулируется подобно двигателю постоянного тока либо изменением величины напряжения якоря (статора), либо изменением тока возбуждения и магнитного потока.
Таким образом, способ управления двигателем двойного питания позволяет обеспечить при согласном вращении магнитного поля и ротора тяжелый пуск двигателя из режима упора, а в области его рабочих частот вращени при встречном вращении магнитного поля и ротора - уменьшение потерь в стали статора и увеличение КПД.
Формула изобретения
чающийся тем, что, с целью повышения КПД путем снижения потерь , в стали статора, регулируют частоту напряжения на фазных обмотках ротора пропорционально разности между величиной вычисленного текущего значения частоты вращения ротора и величиной заданного значения синхронной часто Q ты, причем при превышении частоты
вращения ротора над указанной синх- ронной частотой в процессе разгона двигателя двойного питания изменяют чередование фаз обмотки ротора.
15
25 преобразований магнитных потоков и с входом датчика частоты токов статора, вьсход которого подключен к управляющему входу инверторного звена преоб- разователя частоты статора, управляю30 щий вход выпрямительного звена которого соединен с выходом блока задания амплитуды напряжения статора, блок задания амплитуды напряжения р-о- тора, выход которого соединен с первым управляющим входом выпрямительного звена преобразователя частоты ротора, датчики ЭДС Холла, подключенные выходами к второму входу блока преобразований магнитных потоков, а выходы
Q подключены к входам двух квадраторов, подключенных выходами к входам сумматора, соединенного выходом с первым входом блока сравнения, к второму входу которого подключен выход задатде чика амплитуды магнитного потока в воздушном зазоре машины, выход блока сравнения подключен к входу интегратора, соединенного выходом с вторым управлягацим входом выпрямительного
0 звена-преобразователя частоты ротора, отличающееся тем, что, с целью повышения КПД путем снижения потери в стали статора, введены делитель, блок формирования управляющих
е импульсов, блок обратного преобразования координат, первый и второй арифметические блоки, задающий генератор двухфазного гармонического сигнала, первый и второй блоки прямого преоб35
11151
раэования координат, первый и второй фильтры и датчик фазных напряжений ротора, при этом вход первого фильтра подключен к выходу датчика фазных напряжений статора, а выход соединен с входом первого .блока прямого преобразования координат, выход которого соединен с первым входом первого арифметического блока, выход датчика фазных напряжений ротора подключен к входу второго фильтра, выход которого соединен с входом второго блока прямого преобразования координат, подклю-. ченного выходом к второму входу пер12
вого арифметического блока, выход первого арифметического блока соединен с первым входом второго арифметического блока, второй вход которого соединен с выходом задающего генератора двухфазного гармонического сигнала, выход второго арифметического блока
соединен с входом блока обратного
преобразования координат, выходом соединенного с входом блока формирования управляющих импульсов, выход которого подключен через делитель к управляющему входу инверторного звена преобразователя частоты ротора.
(pue.Z
| Способ управления электродвигателем двойного питания | 1982 |
|
SU1073870A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
