М
О
ю
Од 01 Изо етение относится к измерительно технике и преяназначено для контроля па раметров вибрации при Биброобработке, в частности для вибромашинг работаклдих в зарезонансном режиме,, с регулирован ем интенсивности колебаний за счет разворота дебалансных вифовозбудителей. Известны устройства контроля параме ров вибрациид содержащие включенные последовщ-ельно датчик вибрации, изм& рительный преобразователь пороговый элемент предепьнрй вибрации, а также ключевой элемент Недостатком известных устройств является невозможность автоматизации режима останова виброщ)ивода. Цель изобретения - автоматизация достижения наиболее бла;гопрИ5ггного режима останова вибропривода при минимуме кинетической энергии подвижной части, а также снижение динамических нагрузок при его пуске. Поставленная цель достигается тем, что устройство контроля вибрации, содержащее включенные последовательно датчик вибрациНб измеригсельный преобра зователье пороговый предельной вибрацкИо а также ключевой элемент, снабжено схемой регистрации минимума, вход которой соедннен с выходом измери тельного преобразователе, включенными последовательно датчикогл угла разворота грунЕ дебалансных вифо1з:озбудителей, преобразователем и поро:говы1У# элементом исходного положения дебалансовц блоком логики и управления входы которого соединены соответственно с выходами порогового элемента предельной вибрашШ схемы регис-трации миншлума и порогово го элемента исходного положения деба лансов, а выходы подключены к ключевом элементу и блоку управления приводом разворота дебалансов, этом ус ойство снабжено индика тором проворачивания дебалансов, соед№ ненным с блоком логики и управления. На чертеже представлена структурная схема предлагаемого устройства. Усоройство содержит включенные последовательно датчик 1 вифации, измерительиый преофааователо 2 и пороговы элемент 3 ггредельной вибрации, а также ключевой элемент 4, схему 5 регистраш минимума, включенные последовательно датчик 6 угла развороте трупп дебалан сных вибровозбудителей, прео азователь 7 и пороговый элемент В исходного положения дебалансова а блок 9 логики и управления, входы которого соединены с выходами порогового элемента 3 предельной вибрации, схемы 5 регистрации- минимума и порогового элемента 8 исходного положения дебалансов соответ ственно, а выходы подключены к входам ключевого элемента 4, блока 10 управления приводом разворота дебалансов, индикатора 11 проворачивания дебалан сов, причем вход схемь 5 регистрации минимума подсоединен к выходу измерительного преобразователя 2. Датчик 1 вибрации и датчик 6 угла разворота групп дебалансных вибровозбудител.ей размещены на вибромашине 12, имеющей вибропривод 13 и привод 14 разворота дебалансов, соединенные соответственно с ключевым элементом 4 и блоком 10 управления приводом разворота дебалансов. Устройство работает следующим образом. Датчик 1 вифации воспринимает колебания подвижной части вибромашины 12, а на выходе измерительного преобразователя 2 образуется сигнал, пропорциональный их амплитуде. Если амплитуда колебаний превьпдает предельное .значение допустимой по конструктивным или технологическим соображениям амплитуды, пороговый элемент 3 предельной вибрации вырабатывает логический сигнал останова вибропривода 13, который поступает в блок 9 логики и управления. Для вибромашин 12, работающих в зарезонансном режима (ив особенности для крупногабаритных) представляет опасность чрезмерный размах колебаний при переходе через резонанс подвижной части после отключения вибропривода. Вследствие значительной кинетической энергии колебаний отключение вибропр1шода при большой амплитуде колебаний (5-1О см) приводит к разрывам пневмоамортизирующих баллонов и другим разрушениям. Ecrai же отключать вибрюпривод 13 из режима малых амплитуд, переход через резонанс не представляет опасности для констру ц и вибромашины 12 и обрабатываемой детали (не показано). Таким образом, перед отключением вибропривода 13 необходимо вь вести вибромашину 12 на режим минимальной амплитуды колебаний. С этой целью блок 9 логики и управления при аварийном отключении вибропр вода 13 от логического сиг-нала порогового элемента 3 предельной вибрации вырабатывает сигнал, поступающий на 3 блок 10 управления приводом разворота дебалансов. Включается привод 14 разворота дебалансов, св51занный, например, черва дифференциальный механизм доворота с одной из хрудп дебалансных вибр Jвoзбyдятeлeй вибромашины 12. При этом амплитуда вибрации уменьшается. Схема регистрации минимума 5 (сигналреле), представляющая собой в простейтем случае дифференцирующее устройств и пороговый э/юмент, вьфабатывает логический сигнал, в момент времени, соот ветствующий минимуму вибрации. Он через блок 9 логики и управления воэ действует на ключевой эелемент 4 и блок 10 управления приводом разворота дебалансов, и останавливает вифопр вод 13 и привод 14 разворота дебалан сов. Б аналогичной последовательности происходит останов вибромашины 12 из .режима номинальной амплитуды колебани по команде оператора, вырабатываемой блоком 9 логики и управления.. При пуске вибропривода 13 также целесообразно предварительно установить дебалансы в сбалансированное положение (угол разворота 180). В противном слу чае в трансмиссии вибромашины 12 возншсают нежелательные динамические нах рузки и возрастают пусковые токи, что снижает ресурс работы. Для контроля исходного сбалансированного положения дебалансов устройство содержит датчик 6 угла разворота групп дебалансных вибровозбудителей, преобразователь 7 и пороговый элемент 8 исходного положения дебалансов. Датчик 6 угла разворота групп дебалансных вибровозбуд. тёлей, представляющий собой, например, сельсин-датчик, кинематически связанный с водилом д{1фференциально147 механизма разворота дебалансов, подключен к преобразователю 7. На выходе преобра, зователя 7 образуется напряжение, пропорциональное углу разворота дебалан2654 . сов. Пороговый элемент 8 исходного положения дебалансов, представляющий собой двухаороговый кокларатор, вырабатывает логический сигнал в том если величина напряжения с выхода преобразователя 7 попадает в пределы окна дискриминации порогового элемента 8 исходного положения дебалаисов. Середина окна дискриминации cooTseiv ствует напряжению на выходе преобразователя 7 при сбаланс1фованном положении бровозбудителей, а ширина окна дискримннашш определяет зону допустимого отклонения угла разворота от 180 в исходном положении дебалансов. Блок 9 логики и управления обеспечивает такой режим работы вибромашины 12, при котором включение ви хифивода 13 осуществл51ется лишь после того, как включается привод 14 разворота дебала сов и они устешавливаются в исходное положенпие, о чем сигнализ ует пороговый элемент 8 исходного положения дебалансов. При останове вибропривода 13 включение реверсивного привода 14 разворота дебалансов. происходит в сторону, противоположную той, которая используется для вывода вибромашины 12 ва рабочий режим. Благодаря этому искточается возможность выхода вибромашины 12 на режим недопустимых максимальных амплитуд колебаний (например, при Heaaiv руженном контейнере) при полном цикле развс юта дебалансов. Такую защиту обеопечивает триггерный элемент в блоке 9 логики и управления. Кроме этого, в блоке логиво и управления 9 цредусмот рена возможность мгновенного аварийного останова вибррпривода 13 и 1фнвода 14 разворота дебалансов, а также вр&менные задержки информационных сштналов для блокирования кратковременных ожных сигналов, обусловленных ивй ствием электрических помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| ПРИВОД ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2007 |
|
RU2354446C1 |
| ВИБРАЦИОННАЯ УСТАНОВКА | 2011 |
|
RU2457095C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1971 |
|
SU320779A1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
| Способ отделения от рабочей среды крупногабаритных деталей | 1985 |
|
SU1286392A1 |
| ВИБРАЦИОННАЯ МЕЛЬНИЦА | 2012 |
|
RU2501608C2 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Устройство для регулирования параметров колебаний дебалансного вибратора | 1980 |
|
SU981911A1 |
1. УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ВИБРАЦИИ, содержащее вкдючехщые последовательно датчнк виб- . рацяв, взмервтельный лрео аэователь, пороговый длемент предельной , а также клкяевой элемент, о т л в ч а ю ш е е с я тем, что, с целью автом твэашш достижения наиболее баагаприя него режима останова ви юхфивода при минимуме кинетической подвих иой части, а также снижения динамичёоких нагрузок при его пуске, оно снабжено схемой регнстрааин минимума, вход которой соединен с выходом измерительного преобразователя, вклкяеннымн последовательно датчиком угла разворота групп дебалансных вн ювозбудителей, npeo frзователем и пороговым элементом исходного положения дебалансов, блоком логнкн и управления, входы которого соединены .соответ венно с выходами порогового элемента предельной , схемы р гистрапии минимума и порогового эл&мента исходного положения дебалансов, а выходы подключены к ключевому эл&менту и блоку управления приводом разворота дебалансов. 2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что оно снабжено индикатором проворачивания дебалансов, соединенным с блоком логики и управл иия.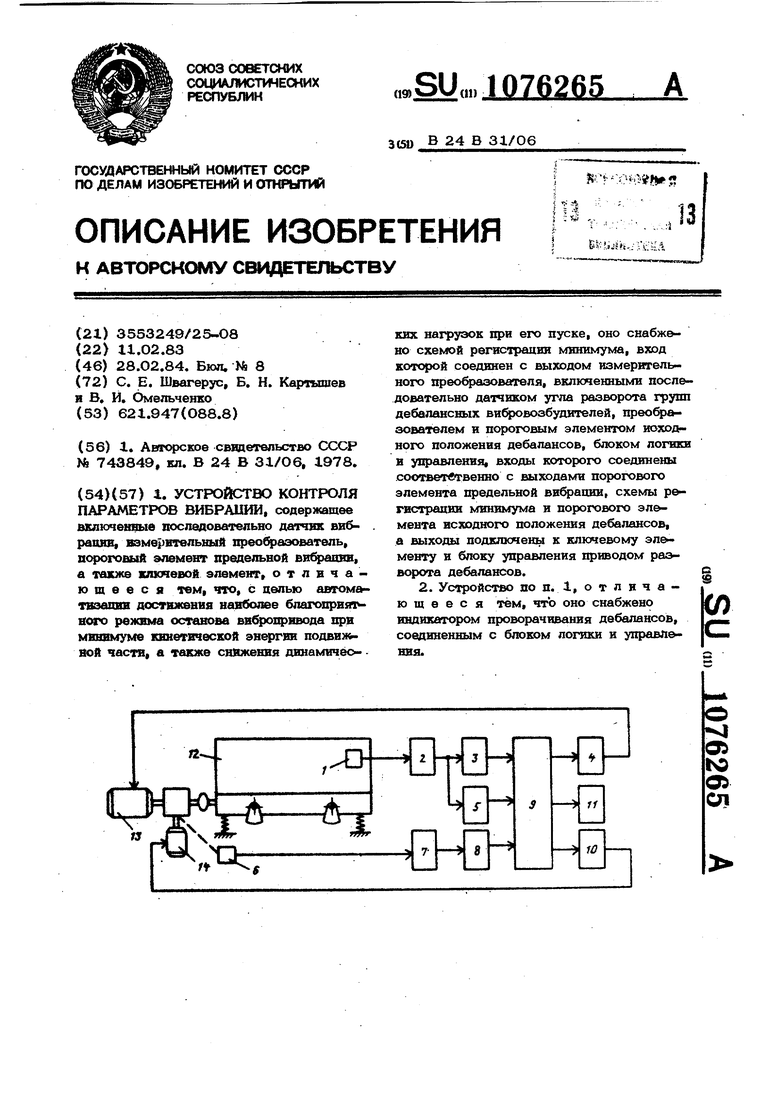
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вибромашина | 1978 |
|
SU743849A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
