Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности.
Известны способы резонансной настройки вибромашин, основанные на поддержании угла сдвига между фазой перемещения рабочего органа вибрационной машины (далее - вибромашина) и фазой вынуждающей силы близким к π/2 за счет введения системы автоматического управления с обратной связью [1]. Структура такой системы состоит из двух основных частей: узла учета отклонения регулируемого параметра и узла учета фазы. В состав узла учета отклонения регулируемого параметра входят задатчики минимальной и максимальной амплитуд. Недостатком этих способов является то, что возбуждаемая при этом амплитуда резонансных колебаний может превышать требуемое значение, регламентируемое условиями протекания технологическим процессом, а также то, что в этих способах не указано, в какой момент времени начинается поиск резонансного режима, что может привести к застреванию асинхронного двигателя в пусковой зоне.
Известны также способы управления амплитудой колебаний механических систем, возбуждаемых дебалансными вибровозбудителями, основанные на изменении величины дисбаланса [1]. Недостатком этих способов является отсутствие возможности изменения величины дисбаланса при работе машины в процессе автоматической настройки на резонансный режим.
Известен способ возбуждения резонансных колебаний механических систем синхронным электродвигателем, авторское свидетельство СССР 1609515, В06В 1/16, заключающийся в подаче на электродвигатель электрического напряжения, в измерении колебаний механической системы, осуществлении сдвига фазы измеренного сигнала, его усилении и подаче на электродвигатель, при этом одновременно подают напряжение на фазную обмотку и обмотку возбуждения электродвигателя, изменяют амплитуду напряжения, подаваемого на обмотки, поворачивают статор до обеспечения условия возбуждения резонансных колебаний. Данный способ имеет ограниченные возможности для практического использования в силу отсутствия возможности регулировать амплитуду резонансных колебаний, а также в силу высокой сложности, а также по причине использования синхронного электродвигателя, который значительно уступает асинхронному электродвигателю по объемам применения.
Известен способ поддержания резонансных колебаний механической системы синхронным электродвигателем, авторское свидетельство СССР 1726055, В06В 1/16, заключающийся в подаче напряжения одновременно на фазную обмотку и обмотку возбуждения электродвигателя, измерении колебаний механической системы, осуществлении сдвига фаз измеренного сигнала, усилении его и подаче на электродвигатель, при этом изменяют амплитуду напряжения, подаваемого на электродвигатель, и поворачивают статор до обеспечения условий возбуждения резонансных колебаний, при измерении колебаний определяют ускорение колебаний механической системы, осуществляют сдвиг фазы измеренного сигнала на π/2, изменяют амплитуду напряжения, подаваемого на фазную обмотку, и поворачивают статор до совпадения движущего момента с моментом нагрузки, а на обмотку возбуждения подают постоянное напряжение.
Данный способ имеет те же недостатки, которые были указаны для предыдущего аналога.
Известен способ получения и поддержания резонансных механических колебаний, патент РФ 2335352, В06В 1/14, заключающийся в том, что на рабочий орган вибрационной установки воздействуют возмущающей периодической силой, угловые частоты возмущающей периодической силы и собственных колебаний рабочего органа в колебательной системе настраивают в режим резонансных колебаний, причем возмущающую периодическую силу передают рабочему органу через основную упругую связь, в качестве возмущающей периодической силы применяют возмущающую периодическую силу инерции, рабочий орган подвешивают в пространстве на виброизолирующей упругой связи с основанием, резонансные колебания рабочего органа возбуждают на основной упругой связи относительно источника возмущающей периодической силы инерции, при этом изменяют угловую частоту возмущающей периодической силы инерции в области частот восходящей части резонансной кривой и настраивают амплитуду колебаний рабочего органа, заданную по технологии, для осуществления которой используется вибрационная установка, измеряют колебания рабочего органа, сигнал измерения колебаний обрабатывают, сравнивают с опорным сигналом, задающим амплитуду колебаний рабочего органа, полученный сигнал ошибки используют в качестве сигнала, управляющего угловой частотой возмущающей периодической силы инерции.
Недостатками данного способа являются сложность применения при значительных изменениях массы рабочего органа вследствие изменения массы технологической нагрузки, так как требуется заранее знать массу рабочего органа для определения резонансной частоты системы и формирования опорного сигнала, притом что масса может изменяться произвольным образом, а также невозможность оценки резонансной частоты и резонансной амплитуды в системах с нелинейными характеристиками восстанавливающей силы, которые проявляются при значительных перемещениях рабочего органа.
В качестве прототипа выбран способ автоматической настройки резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя, патент РФ №2572657, В06В 1/16, заключающийся в том, что на рабочий орган вибрационной машины воздействуют периодической возмущающей силой, которая возникает при вращении дебаланса инерционного вибровозбудителя с приводом от асинхронного электродвигателя, частоту вращения дебаланса изменяют за счет изменения частоты питающего напряжения в зависимости от величины сдвига фаз между колебаниями рабочего органа и периодической возмущающей силой, который на резонансе должен быть равен π/2, при этом определение величины сдвига фаз проводят по сигналам с датчика углового положения дебалансов и датчика колебаний рабочего органа.
Недостатком прототипа является отсутствие возможности поддерживать и регулировать амплитуду резонансных колебаний без остановки машины и без проведения сложных монтажных и наладочных работ в условиях изменяющейся массы рабочего органа вследствие изменения массы технологической нагрузки.
Целью предлагаемого изобретения является поддержание требуемой амплитуды при автоматической настройке на резонансный режим колебаний рабочего органа вибромашины, возбуждаемых дебалансным инерционным вибровозбудителем с приводом от асинхронного двигателя, при изменении в широких пределах массы технологической нагрузки за счет управления диссипации энергии колебаний.
Указанная цель достигается тем, что в предлагаемом способе управления амплитудой при автоматической настройке на резонансный режим колебаний вибрационной машины с приводом от асинхронного двигателя осуществляется за счет того, что колебания рабочего органа вибрационной машины с демпфером с заданными диссипативными характеристиками возбуждают периодической силой путем вращения дебаланса инерционного вибровозбудителя с приводом от асинхронного двигателя, частоту вращения которого настраивают на резонансный режим колебаний механической системы вибрационной машины проводят по заданному алгоритму, для чего одновременно измеряют перемещение рабочего органа и угловое положение дебаланса, при этом в этом способе измеряют рассогласование амплитуды колебаний рабочего органа с наперед заданным ее значением, изменяют величину диссипации энергии колебаний в демпфере, сводя величину рассогласования амплитуды колебаний рабочего органа к нулю, при этом изменение величины диссипации вычисляют по заданному алгоритму, который связывает амплитуду колебаний рабочего органа и диссипативные характеристики демпфера.
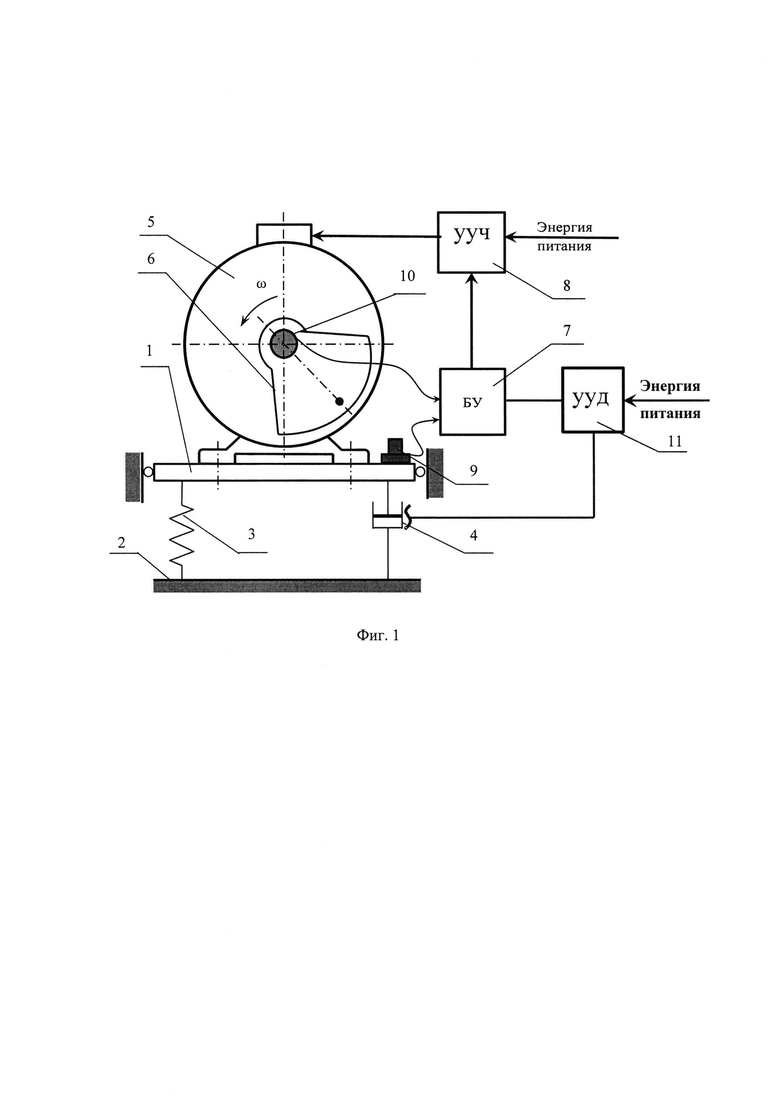
На фиг. 1 представлена схема вибромашины, в которой может быть реализован предлагаемый способ и наглядно показана возможность управления и поддержание амплитуды колебаний рабочего органа.
Указанный способ поддержания требуемой амплитуды при автоматической настройке резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя может быть реализован следующим образом (фиг. 1). Механическая система вибромашины состоит из рабочего органа вибромашины 1, связанного с основанием 2 посредством упругих элементов 3 и демпфера 4. Для возбуждения колебаний используется инерционный вибровозбудитель, выполненный в виде электродвигателя 5 с дебалансом 6, закрепленным на его оси. Электродвигатель 5 жестко закреплен на рабочем органе вибромашины 1. Устройство также содержит систему управления с обратной связью, включающую блок управления 7 (БУ), устройство управления частотой 8 (УУЧ), управляющее частотой вращения электродвигателя 5, датчик колебаний - виброметр 9, установленный на рабочем органе вибромашины 1; датчик углового положения дебаланса 10, установленный на оси электродвигателя 5; входы блока управления 7 (БУ) соединены с датчиком колебаний рабочего органа 9 и датчиком углового положения ротора электродвигателя 10, один выход блока управления 7 (БУ) соединен с устройством для управления частотой вращения 8 (УУЧ) электродвигателя, а другой выход соединен с устройством управления демпфером колебаний 11 (УУД), при этом блок управления выполнен с возможностью обработки сигналов с датчиков колебаний 9 и углового положения дебаланса 10 и формирования сигнала управления частотой вращения электродвигателя и управления величиной диссипации в демпфере.
При необходимости поддержания требуемой амплитуды колебаний при настройке резонансного режима на рабочий орган вибромашины 1 воздействуют периодической возмущающей силой, которая возникает при вращении дебаланса 6 инерционного вибровозбудителя с асинхронным двигателем 5, частоту вращения дебаланса 6 регулируют за счет изменения частоты питающего напряжения с учетом различия между этими частотами в зависимости от величины сдвига фаз между колебаниями рабочего органа вибрационной машины 1 и периодической возмущающей силой, которая определяется угловым положением дебаланса 6, при этом измерение величины сдвига фаз проводят по сигналам с датчика углового положения дебаланса 10 и датчика колебаний рабочего органа 9, а амплитуду колебаний регулируют за счет изменения диссипации энергии колебаний с учетом различия между измеряемой амплитудой и наперед заданным ее значением, при этом изменение демпфирования проводят по сигналам с датчика колебаний рабочего органа 9.
Необходимое изменение частоты питающего напряжения определяют в зависимости от параметров механической системы вибромашины и электродвигателя, частоты питающего напряжения, токов в обмотках электродвигателя, частоты вращения ротора, амплитуды колебаний и сдвига фазы между колебаниями рабочего органа и возмущающей силой, а необходимое изменение демпфирования определяют в зависимости от характеристик демпфера и амплитуды колебаний рабочего органа вибромашины. В дополнение к измерению колебаний рабочего органа вибромашины, измеряют угловое положение дебаланса, что позволяет определить сдвиг фаз между колебаниями рабочего органа вибромашины и возмущающей силой, определяют отличие сдвига фазы от сдвига фазы, соответствующего резонансному режиму, в зависимости от которого изменяют частоту вращения дебаланса. Причем при определении сдвига фаз между колебаниями рабочего органа и угловым положением дебаланса определяют рассогласование полученного сдвига фаз от π/2 при измерении перемещения, при этом изменяют частоту вращения дебаланса в зависимости от величины рассогласования сдвига фаз, сводя ее к нулю, а изменение частоты вращения определяют по наперед заданному алгоритму, который связывает сдвиг фазы, частоты питающего напряжения и частоту вращения дебаланса в зависимости от механических и электрических параметров вибромашины и электродвигателя. Изменение величины диссипации энергии колебаний определяют по наперед заданному алгоритму в зависимости от рассогласования измеряемой амплитуды с наперед заданным ее значением. Это позволяет достичь устойчивой резонансной настройки с требуемой амплитудой колебаний и может применяться для вибромашин с нелинейными механическими характеристиками их элементов и вибромашин с вибровозбудителем с ограниченной мощностью.
Способ возбуждения и поддержания резонансных колебаний механических систем осуществляют следующим образом.
Колебания рабочего органа вибромашины возбуждают периодической силой, которая возникает при вращении дебаланса инерционного вибровозбудителя. Измеряют колебания рабочего органа вибромашины датчиком колебаний, например виброметром, велосиметром или акселерометром (в случае измерения велосиметром сигнал интегрируют один раз, а в случае измерения акселерометром сигнал интегрируют дважды). Измеряют угловое положение дебаланса с помощью датчика углового положения дебаланса, например многооборотного абсолютного энкодера. Сигналы с датчиков поступают в блок управления, в котором определяют момент времени t* выхода вибромашины на установившийся режим, когда относительная разность измеряемых двух последовательных размахов колебаний не превышает наперед заданной величины, которая определяется заданной точностью регулирования и не должна превышать 5%.
При достижении резонансного режима в блоке управления определяют величину рассогласования измеренной амплитуды с наперед заданным значением, в зависимости от которого в блоке управления формируется сигнал, управляющий величиной диссипации в демпфере (например, в магнитно-жидкостном демпфере напряжением питания, изменяющим вязкость магнитно-реологической жидкости).
Для упрощения системы автоматического управления (САУ) выход на установившийся режим может быть задан временем установления в 5-20 с. В момент времени t больше t*, при котором рабочий орган вибромашины оказывается в положении статического равновесия, а скорость колебаний рабочего органа оказывается больше нуля, определяют сдвиг фазы ε по угловому положению дебаланса. Определяют рассогласование между измеренным сдвигом фазы и сдвигом фазы, соответствующим резонансному режиму колебаний, равным π/2. В зависимости от величины рассогласования сдвига фаз изменяют частоту вращения дебаланса, сводя величину рассогласования к нулю. При этом изменение частоты вращения определяют в блоке управления по наперед заданному алгоритму, который связывает сдвиг фазы, частоту питающего напряжения и частоту вращения дебалансов в зависимости от механических и электрических параметров вибромашины и электродвигателя. При достижении резонансных колебаний в блоке управления определяют рассогласование между измеренной амплитудой колебаний и наперед заданным ее значением. В зависимости от величины рассогласования амплитуды колебаний в блоке управления по наперед заданному алгоритму формируется сигнал, изменяющий величину диссипации в демпфере, что приводит к изменению амплитуды колебаний, сводя величину рассогласования с требуемым значением к нулю.
Электродвигатель подсоединяют к внешнему источнику электрического тока через устройство управления 8. Ротор электродвигателя начинает вращаться, возбуждая колебания рабочего органа вибромашины. При вращении ротора электродвигателя 5 и колебаниях рабочего органа вибромашины 1 сигналы с датчиков колебаний 9 и углового положения дебаланса 10 поступают на блок управления 7, в котором проводятся периодическое измерение и обработка этих сигналов, в результате которой определяются частота колебаний и перемещения рабочего органа вибромашины, частота вращения ротора, сдвиг фазы между колебаниями рабочего органа вибромашины и направлением периодической возмущающей силой, который определяется угловым положением дебаланса. Проводится проверка условия выхода системы на установившийся режим колебаний, который определяется величиной изменения измеренных размахов колебаний на текущем и предыдущем шагах измерения или заданием времени установления колебаний.
При достижении установившегося режима колебаний устанавливается рассогласование величины измеренного сдвига фазы с величиной сдвига фазы, соответствующей резонансному режиму колебаний, который должен быть равен π/2. Полученное рассогласование сдвига фаз обрабатывается и формируется управляющий сигнал на устройство управления частотой вращения электродвигателя, что приводит к изменению частоты вращения электродвигателя и соответственно частоты колебаний рабочего органа вибромашины.
Демпфер с управляемой диссипацией энергии колебаний присоединен к внешнему источнику энергии питания. При достижении установившегося режима резонансных колебаний устанавливается рассогласование величины измеренной амплитуды колебаний с наперед заданным требуемым ее значением. Полученное рассогласование амплитуды колебаний обрабатывается и формируется управляющий сигнал на устройство управления величиной диссипации в демпфере, что приводит к изменению амплитуды колебаний рабочего органа.
Благодаря обратной связи обеспечивается автоматическая настройка и поддержание резонансных колебаний рабочего органа вибрационной машины с требуемой амплитудой независимо от величины изменения ее параметров.
Список литературы
1. Вибрации в технике: справочник. В 6 т. Т. 4. Вибрационные процессы и машины / под. ред. Э.Э. Лавендела. - М.: Машиностроение, 1981. - 509 с., стр. 460-467.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Способ автоматической настройки резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя | 2020 |
|
RU2753983C1 |
| СИСТЕМА ВИБРОИЗОЛЯЦИИ С АВТОМАТИЧЕСКОЙ НАСТРОЙКОЙ И ПОДДЕРЖАНИЕМ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ | 2016 |
|
RU2637578C1 |
| Устройство формирования вибрационного поля технологической машины и способ для его реализации | 2023 |
|
RU2818983C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Устройство формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2753843C1 |
| Вибрационная машина | 1981 |
|
SU1009533A1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности. Способ управления амплитудой при автоматической настройке на резонансный режим колебаний вибрационной машины с приводом от асинхронного двигателя заключается в том, что колебания рабочего органа вибрационной машины с демпфером с заданными диссипативными характеристиками возбуждают периодической силой за счет вращения дебаланса инерционного вибровозбудителя с приводом от асинхронного двигателя, частоту вращения которого настраивают на резонансный режим колебаний механической системы вибрационной машины по заданному алгоритму, для чего одновременно измеряют перемещение рабочего органа и угловое положение дебаланса. Затем измеряют рассогласование амплитуды колебаний рабочего органа с наперед заданным ее значением, изменяют величину диссипации энергии колебаний в демпфере, сводя величину рассогласования амплитуды колебаний рабочего органа к нулю, при этом изменение величины диссипации вычисляют по заданному алгоритму, который связывает амплитуду колебаний рабочего органа и диссипативные характеристики демпфера. Технический результат заключается в поддержании требуемой амплитуды при автоматической настройке на резонансный режим колебаний рабочего органа вибрационной машины. 1 ил.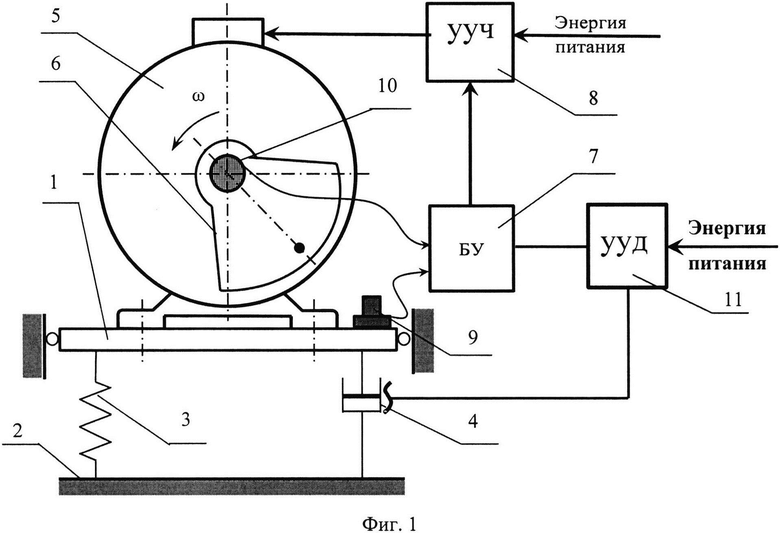
Способ управления амплитудой при автоматической настройке на резонансный режим колебаний вибрационной машины с приводом от асинхронного двигателя, заключающийся в том, что колебания рабочего органа вибрационной машины с демпфером с заданными диссипативными характеристиками возбуждают периодической силой за счет вращения дебаланса инерционного вибровозбудителя с приводом от асинхронного двигателя, частоту вращения которого настраивают на резонансный режим колебаний механической системы вибрационной машины по заданному алгоритму, для чего одновременно измеряют перемещение рабочего органа и угловое положение дебаланса, отличающийся тем, что в нем измеряют рассогласование амплитуды колебаний рабочего органа с наперед заданным ее значением, изменяют величину диссипации энергии колебаний в демпфере, сводя величину рассогласования амплитуды колебаний рабочего органа к нулю, при этом изменение величины диссипации вычисляют по заданному алгоритму, который связывает амплитуду колебаний рабочего органа и диссипативные характеристики демпфера.
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2009 |
|
RU2407929C1 |
| Крестниковский К.В | |||
| и др | |||
| Экспериментальная проверка работоспособности системы автоматического управления вибрационной машины // XXVIII Международная Инновационно-ориентированная конференция молодых ученых и студентов | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Еремейкин С.А | |||
| и др | |||
| Экспериментальный анализ работоспособности системы управления колебаниями механической системы с самосинхронизирующимися вибровозбудителями // Проблемы машиностроения и надежности машин | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| US 8960386 B2, 24.02.2015 | |||
| Способ настройки на заданный режим колебаний вибромашины с нелинейными упругими связями и с рабочей массой | 1990 |
|
SU1727928A1 |
| Устройство для возбуждения колебаний механических систем | 1982 |
|
SU1199298A1 |

