(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ДЕБАЛАНСНОГО ВИБРАТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления системой приводов вибросита | 2017 |
|
RU2649203C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| СПОСОБ И УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВИБРАЦИОННЫХ НАГРУЗОК В РОТОРНЫХ МАШИНАХ | 2004 |
|
RU2282763C2 |
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| Вибрационный сейсмический источник | 1989 |
|
SU1728823A1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
| Устройство для автоматического измерения фазового положения дебаланса | 1977 |
|
SU720289A1 |
| СКВАЖИННЫЙ ВИБРАТОР С УПРАВЛЕНИЕМ ЧЕРЕЗ КАРОТАЖНЫЙ КАБЕЛЬ | 1996 |
|
RU2112253C1 |
| Электропривод вибратора | 1987 |
|
SU1550448A1 |
1
Изобретение относится к вибрационной технике и может быть использовано для возбуждения колебаний с регулируемыми параметрами,
Известно устройство для регулирования амплитуды и направленности колебания дебалансных вибраторов с приводом от синхронных двигателей 1.
Недостатком устройства является
существенная зависимость колебаний ви&ратора от параметров нагрузки.
Наиболее близким к предлагаемому по технической сущности является устрой- jj ство для регулирования параметров коле4н баний дебалансного вибратора с приводом от асинхронных двигателей, в котором источник питания одного из двигателей снабжен фазосдвигающим блоком Г 2 . 2Ь
Недостатком этого устройства является невозможность плавного регулирова- 1ния амплитуды и направленности возбуждаемых колебаний.
Цель изобретения - повьтшение точности регулировки направленности колебаний и обеспечение возможности регу-. лирования величины вибротяговой силы.
Поставленная цель достигается тем, что устройство для регулирования параметров колебаний дебалансного вибратора, содержащее задающий блок, двигатели приводов дебалансов, устанавливаемые
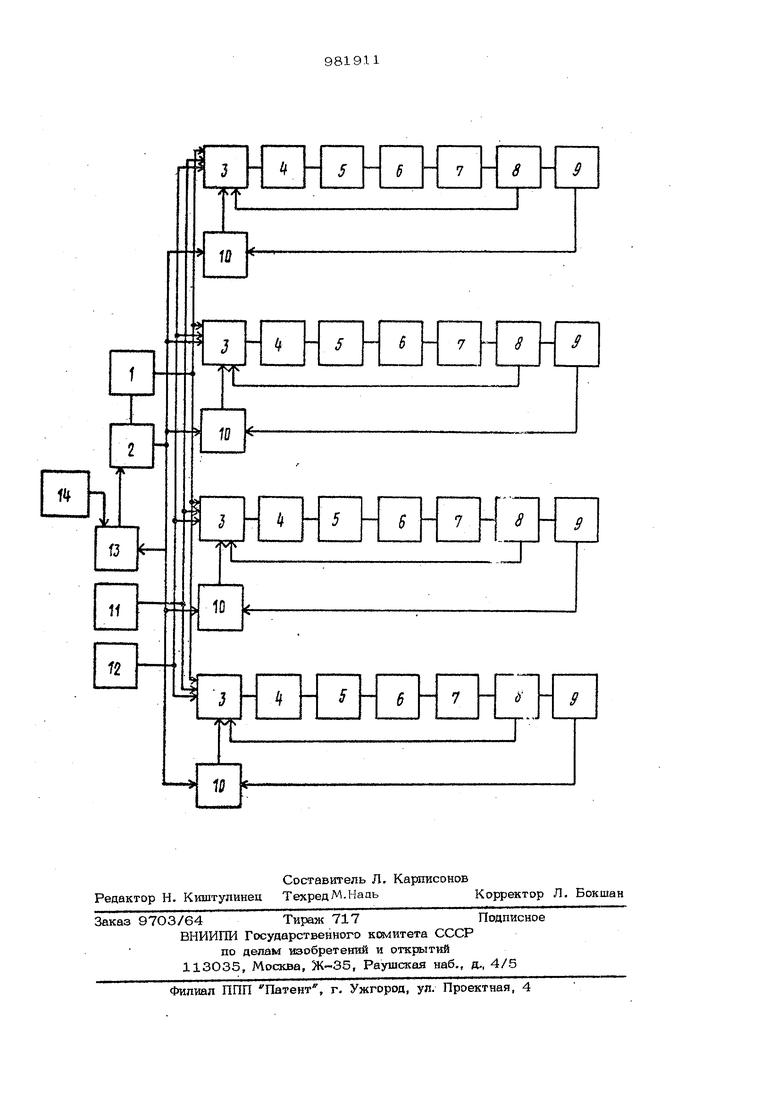
10 на плите, и по числу двигателей преобразователи напряжения в частоту, упреиаляемые источники питания двигателей и коммутирующие блоки, снабжено датчиком положения плиты, подсоединенными к каждому двигателю датчиками числа оборотов -ц датчиками углового полож&шш ротора двигателя, интегратором, блоком синхронизации, блоком регулирования направленности колебаний, блоком регулирования величины вибротяговой силы вибратора и по числу двигателей, схемами измерения фазового рассогласования и блоками обработки сигналов, вы398ходы которых подключены ко входам преобразователей напряжения 5 частоту, а входы - к одному из выходов задающего блока, второй выход которого подключен ко входз интегратора, выход которого соединен со входами схем измерения фазового рассогласования, вторые входы которых подключены к датчикам углово го положения роторов, выходы схем измерения фазового рассогласования подключены ко вторым входам блоков обработки сигналов,, третьи входы которых подключены к датчикам- числа оборотов двигателя, четвертые и пятые входы соединены соответственно с выходами блоков регулирования направленности колеба ний и величины вибротяговой силы, а ко второму входу интегратора присоединен выход блока синхронизации, два входа которого подключены к выходу интеграто ра,.1 датчика положения плиты соответственно, На чертеже представлена функциональная схема устройства для регулирования параметров колебаний дебалансного вибратора. Устройство содержит задающий блок 1 интегратор 2 и в каждом канале блок 3 обработки сигналов, преобразователь 4 напряжения в частоту, коммутирующий блок 5, управляемый источниг 6 питания двигателя 7 привода дебаланса, датчики 8 числа оборотов двигателя и 9 угловог положения ротора двигателя и схему 10 измерения фазового рассогласования, и, кроме того, блок 11 регулирования направленности колебаний, блок 12 регулирования величины вибротяговой силы вибратора и блок 13 синхронизации и датчш 14 положения плиты. Устройство работает следующ|ам образом. Напряжение, пропорциональное частоте вращения двигателей, с выхода задающег блока 1 подается на вход интегратора 2 в котором оно преобразуется в пилообразное напряжение, соответствующее закону изменения фазы дебалансов в преде лах одного оборота, и периодом, равным периоду вращения дебалаксов. Информация о действительном положении дебалан сов получается при помощи датчика 9 углового положения . дебалансов и интегр тора, входящего в схему 10 изменения фазового рассогласования. На вход схем 10 измерения фазового рассогласования подается напряжение с датчика 8 числа оборотов ротора двигателя, пропорцио4нальное действительной частоте вращения ебалансов. Это напряжение и импульсы датчизса 9 углового положения ротора двигателя используются для формирования пилообразного напряжения в схеме 10 измерения фазового рассогласования. Это напряжение сравгошается с пилообразным напряжением интегратора 2 при помощи усилителя-сумматора схемы 10 измерения фазового рассогласования. Выходное напрях ение схемы 10, пропорциональное ошибке по фазе, усиленное и скорректированное в блоке 3 обработки сигналов подается на вход преобразователя 4 напряжения в частоту. Коммутиру- ющий блок 5, на вход которого подается напряжение с выхода преобразователя 4 напряжения в частоту, и последовательно соединенные с }гим управляемый источник 6 питания двигателя и асинхронный двигатель 7 работает таким образом, чтобы установившаяся ошибка по фазе была минимальной. При этом ее величина будет обратнопропоршяональна коэффициенту передачи фазового контура регулирования. Кроме того, напряжение с выхода задающего блока 1 подается на вход блока 3 обработки сигналов, в котором оно сравнивается с напряжением, пропорциональным действительной частоте вращения, поступающего с датчика 8 числа оборотов двигателя. Напряжение, пропорциональное ошибке по скорости также, как и напряжение, пропорциональное ошибке по фазе, используется для формирования управляющего сигнала в блоке 3 обработки сигналов. Если на вход блока 3 icpoMe напряжеШ1Я с задающего блока 1 подать напряжение, пропорциональное угловому ,положешю дебалансов, например с блока 11 регулирования направленности колебаний, то фазовая система будет работать таким образом, что фаза вращения дебалансов в установившемся режиме будет пропорциональна напряжению, поступ,ающему с блока 11. Этот используется в устройстве для независимой установки частоты и фазы вращения дебалансов. Таким образом, при наличии в устройстве двух каналов управления и блока 11 регулирования направленности можно управлять направленностью колебаний вибратора, а при наличии четырех каналов управления и блока 12 регулирования величины Биброгяговой силы вибратора можно изменять амплитуду силы.
Согласованная работа несколькихвибраторов осуществляется с помощью блока 13 синхронизации, в котором сравнивают ся фазы колебаний выходных напряжений интегратора 2 и датчика 14 положения плиты. Полученное напряжение, пропорциональное :1рассогласованию. по фазе указанных сигналов, с выхода блока 13 CUHVхронизации подается на вход интегратора 2 и используется для корректга фазы выходного пилообразного напряжения интегратора 2, таким образом, чтобы рассогласование было минимальным.
Технико-экономический эффект от внедрения устройства определяется высокой точностью воспроизведения различных законов модуляции частоты, возможностью регулирования величины и направленности вибротяговой силы. При использовании четырех двигательного дебалансного вибратора амплитуду вибротяговой силы практически можно изменять от максимального значения до минимального, составляющего 1О-15% от максимальной амплитуды СШ1Ы.
Формула изобретения
Устройство для регулирования пара.метров колебаний дебалансного вибратора, содержащее задающий блок, двигатели приводов дебалансов, устана&ливаемые на плите, и по зислу двигателей преобразователи напряжения в частоту, управляемые источники питания двигателей и коммутирующие блоки, отличающееся тем, что, с целью повь щения точности регулировки направлеввости колебаний и обеспечения возможности плавного регулирования величины вибротяговой силы, оно снабжено датчиком положения плитщ, подсоединенными к каждому двигателю датчиками числа оборотов и датчиками углового положения ротора двигателя, интегратором, блоком синхронизации, блоком регулирования направленности колебаний, блоком регулви рования величины вибротяговой силы вибратора и по числу двигателей, схемами измерения фазового рассогласования и блоками обработки сигналов, выходы которых подключены ко входам npec6paai вателей напряхсения в частоту, а входы к одному из выходов задающего блока, второй выход которого подключен ко Bxcvду .интегратора, выход которого соединен со входами схем измерения фазового рассогласования, вторые входы которых подключены к датчикам углового положения роторов, выходы схем измерения фазового рассогласования подключены ко вторым входам блоков обработки налов, третьи входы которых подключены к датчикам числа оборотов двигателя, четвертые и пятые входы соединены соответственно с выходами блоков регул рования направленности колебаний и величины вибротяговой склы, а ко второму входу интегратора подсоединен выход блока синхронизации, два входа которого подключены к выходу интегратора и датчика положения плиты соответстве но.
Источшки. информации, .принятые во внимание при экспертизе
