ю
ОТ Os


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |

Изобретение относится к управлению рабочими электроприводами одноковшовых экскаваторов и может быть использовано для управления электроприводами других промышленных установок, в которых требуется ограничение динамических нагрузок. Цель изобретения - повышение надежности работы экскаватора путем снижения динамических нагрузок, а также улучшение температурного режима электропривода. Для этого по сигналам с коман- доаппарата 18 и датчика 19 скорости определяется в сумматоре 20 разностный сигнал, который после преобразования вместе с сигналом датчика 3 тока используется для определения нагрузки, и по сигналу скорости формируется функция ошибки. В случае, если суммарная температура электроприводов напора и .подъема превышает заданное, то происходит снижение тока якоря двигателя электропривода напора. 1 з.п. ф-лы, 4 ил. - Ё
фиеА
Изобретение относится к управлению рабочими электроприводами одноковшовых экскаваторов и может быть использовано для управления электроприводами других промышленных установок, в которых требуется ограничение динамических нагрузок.
Известны устройства управления электроприводами, в которых ограничение тока якорной цепи до стопорного значения осуществляется за счет либо включения в цепь обратной связи по току нелинейного звена, либо регулятором скорости при использовании принципа подчиненного регулирования координат.
Недостатком устройств первого типа является то, что в режимах стопорения ковша, характерных для копающих механизмов, и в режимах пуска, торможения и реверса многодвигательных приводов при наличии зазоров в кинематических передачах, что характерно для поворотных механизмов, динамические выбросы тока превышают его стопорное значение в 1,5-2 раза, что является причиной разрушения электромеханического оборудования.
По сравнению с ними устройства второго типа обеспечивают уменьшение динамических нагрузок на привод, однако к их недостаткам следует отнести неэффективное снижение коэффициента динамичности механизмов для приводов копающих механизмов в режиме жесткого стопорения ковша, что приводит к снижению производительности и надежности экскаваторов. Общим недостатком этих устройств является выбор величины стопорных токов всех главных электроприводов экскаватора для какого-то одного режима работы по тепловому расчету, в то время как условия эксплу атации и режимы работы электроприводов постоянно меняются. Это приводит к тому, что в тяжелых условиях эксплуатации главные электроприводы экскаватора перегреваются, что существенно снижает их надежность.
Наиболее близким техническим решением к предлагаемому является устройство управления электроприводами копающих механизмов экскаваторов, состоящее из последовательно соединенных командоаппа- рата и первого сумматора, к первому входу которого подключен выход регулятора тока, к входу последнего подключены датчик тока, первый вход первого порогового элемента и датчик тока нагрузки, к второму входу которого подсоединены датчик скорости и вход регулятора скорости, выход регулятора скорости подключен к второму входу первого сумматора, выход датчика нагрузки сое-
динен с входом ключа, осуществляющего коммутацию оптимальных обратных связей по току якорной цепи и скорости двигателя. Третий вход первого сумматора соединен с
5 выходом первого порогового элемента, к второму входу которого подключен второй сумматор, к первому входу которого подсоединен датчик температуры электропривода подъема, а к второму входу - датчик
10 температуры электропривода напора. Вход управляемого преобразователя электропривода напора подключен к выходу первого сумматора.
Недостатком данного устройства явля15 ется то, что параметры привода меняются только при изменении температуры электроприводов подъема и напора, т.е. не учитываются внешние тепловые условия работы привода, и при переходе с одного критерия
20 оптимальности на другой возможны динамические броски тока.
Цель изобретения - повышение надежности экскаватора путем снижения динами- ческих нагрузок, а также улучшение
25 температурного режима электропривода.
Сущность изобретения состоит в том, что в предлагаемом техническом решении организуется автоматическое высокочастотное изменение коэффициентов усиле30 ния регуляторов тбка и скорости исходя из условия обеспечения в скользящем режиме инвариантности скорости двигателя к изменениям возмущающего воздействия.
При изменениях возмущающего воз35 действия обеспечивается в скользящем режиме равенство нулю функции ошибки по скорости А о) и ее производной:
0 Aft , d(Ao)),,,
Г+ dt (1)
40 где Т - постоянная времени экспоненциального закона изменения ошибки.
Исходя из указанного требования выбирают следующие алгоритмы изменения коэффициентов усиления 45 регулятора тока:
1/ Jot при н S 0 К| {Д при
(2)
50
регулятора скорости:
аш при ftto при
(3)
55 и их величины
А Ч-аи +ai2 В сц - ,
01
al2a21 + Ы К| ,
/5ш ™тИ+ 11-в12Ч1+Ь1 1
См Ы 1
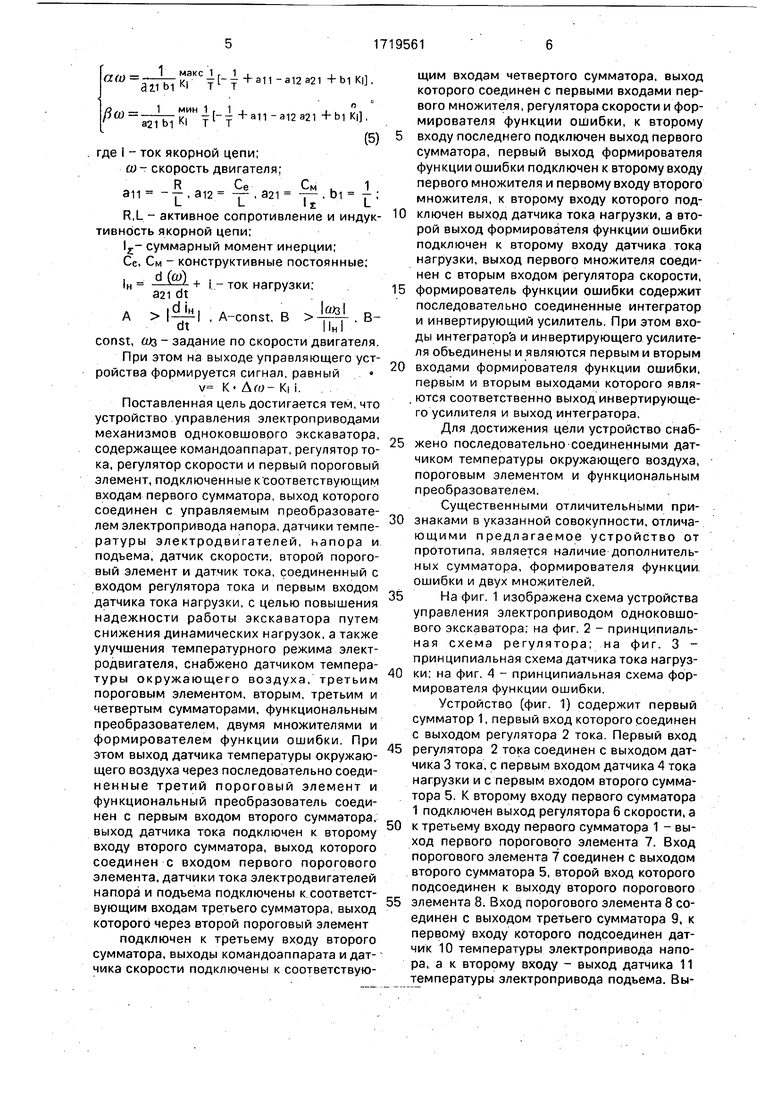
где i - ток якорной цепи; со- скорость двигателя; RСе
Э11 - т- 312 -т- , 321 -т- LLI z
R.L- активное сопротивление и индуктивность якорной цепи;
1Ј- суммарный момент инерции;
Се, См - конструктивные постоянные;
н + i. - ток нагрузки;
А |SU« | , A-const, В 4 . В- dtНН1
const, (л)з - задание по скорости двигателя.
При этом на выходе управляющего устройства формируется сигнал, равный v К Дм- Ki i.
Поставленная цель достигается тем, что устройство.управления электроприводами механизмов одноковшового экскаватора, содержащее командоаппарат, регулятор тока, регулятор скорости и первый пороговый элемент, подключенные к соответствующим входам первого сумматора, выход которого соединен с управляемым преобразователем электропривода напора, датчики температуры электродвигателей, напора и подъема, датчик скорости, второй пороговый элемент и датчик тока, соединенный с входом регулятора тока и первым входом датчика тока нагрузки, с целью повышения надежности работы экскаватора путем снижения динамических нагрузок, а также улучшения температурного режима электродвигателя, снабжено датчиком температуры окружающего воздуха, третьим пороговым элементом, вторым, третьим и четвертым сумматорами, функциональным преобразователем, двумя множителями и формирователем функции ошибки. При этом выход датчика температуры окружающего воздуха через последовательно соединенные третий пороговый элемент и функциональный преобразователь соединен с первым входом второго сумматора, выход датчика тока подключен к второму входу второго сумматора, выход которого соединен с входом первого порогового элемента, датчики тока электродвигателей напора и подъема подключены к.соответствующим входам третьего сумматора, выход которого через второй пороговый элемент
подключен к третьему входу второго сумматора, выходы командоаппарата и датчика скорости подключены к соответствую
щим входам четвертого сумматора, выход которого соединен с первыми входами первого множителя, регулятора скорости и формирователя функции ошибки, к второму 5 входу последнего подключен выход первого сумматора, первый выход формирователя функции ошибки подключен к второму входу первого множителя и первому входу второго множителя, к второму входу которого под10 ключей выход датчика тока нагрузки, а второй выход формирователя функции ошибки подключен к второму входу датчика тока нагрузки, выход первого множителя соединен с вторым входом регулятора скорости,
15 формирователь функции ошибки содержит последовательно соединенные интегратор и инвертирующий усилитель. При этом входы интегратора и инвертирующего усилителя объединены и являются первым и вторым
20 входами формирователя функции ошибки, первым и вторым выходами которого явля- . ются соответственно выход инвертирующего усилителя и выход интегратора.
Для достижения цели устройство снаб25 жено последовательно-соединенными датчиком температуры окружающего воздуха, пороговым элементом и функциональным преобразователем.
Существенными отличительными при30 знаками в указанной совокупности, отличающими предлагаемое устройство от прототипа, является наличие дополнительных сумматора, формирователя функции, ошибки и двух множителей.
35 На фиг. 1 изображена схема устройства управления электроприводом одноковшового экскаватора; на фиг. 2 - принципиальная схема регулятора; на фиг. 3 - принципиальная схема датчика тока нагруз40 ки; на фиг. 4 - принципиальная схема формирователя функции ошибки.
Устройство (фиг. 1) содержит первый сумматор 1, первый вход которого соединен с выходом регулятора 2 тока. Первый вход
45 регулятора 2 тока соединен с выходом датчика 3 тока, с первым входом датчика 4 тока нагрузки и с первым входом второго сумматора 5. К второму входу первого сумматора 1 подключен выход регулятора 6 скорости, а
50 к третьему входу первого сумматора 1 - выход первого порогового элемента 7. Вход порогового элемента 7 соединен с выходом второго сумматора 5, второй вход которого подсоединен к выходу второго порогового
55 элемента 8. Вход порогового элемента 8 соединен с выходом третьего сумматора 9, к первому входу которого подсоединен датчик 10 температуры электропривода напора, а к второму входу - выход датчика 11 температуры электропривода подъема. Выход первого сумматора 1 соединен с входом управляемого преобразователя 12 электропривода напора, питающего электродвигатель 13. Управляемый электропривод 14 подъема включает в себя систему 15 управления, управляемый преобразователь 16 и электродвигатель 17. Выход командоаппа- рата 18 и выход датчика 19 скорости подключены соответственно к первому и второму входам четвертого сумматора 20. Выход четвертого сумматора 20 соединен с первым входом формирователя 21 функции ошибки, с первым входом регулятора 6 скорости и с первым входом первого множителя 22. Второй вход множителя 22 соединен с первым выходом формирователя 21 функции ошибки и первым входом второго множителя 23. Выход первого множителя 22 соединен с вторым входом регулятора 6 скорости, Второй вход второго множителя 23 соединен с выходом датчика 4 тока нагрузки, Выход второго множителя соединен с вторым входом регулятора 2 тока. Второй вход датчика 4 тока нагрузки подсоединен к второму выходу формирователя 21 функции ошибки, второй вход которого соединен с выходом первого сумматора 1.
Цепь улучшения температурного режима электропривода содержит датчик 24 тем- пературы окружающего воздуха, подключенный к входу третьего порогового элемента 25, к выходу которого подсоединен функциональный преобразователь 26. Выход функционального преобразователя 26 соединен с третьим входом второго сумматора 5.
Регулятор 2(6) состоит (фиг. 2) из коммутирующего элемента 27, содержащего двух- позиционный контакт 28 и модуль 29 управления, управляющий положением контакта 28, усилителя 30, входных резисторов 31 и 32 и резистора 33 обратной связи. Управляющий вход коммутирующего элемента 27 является входом модуля 29 управления и соединен с вторым входом регулятора 2(6). Исполнительный вход коммутирующего элемента 27 является входом двухпозиционного контакта 28 и соединен с первым входом регулятора 2(6). В зависимости от состояния модуля 29 управления двухпозиционный контакт 28 занимает одно из двух положений и подсоединяет первый вход регулятора 2(6) к инвертирующему входу усилителя 30 через один из резисторов 31 или 32. Инвертирующий усилитель реализован на усилителе 30, в обратную связь которого подключен резистор 33 обратной связи. Выход усилителя 30 является выходом регулятора 2(6). Выбор резисторов 31- 33 осуществляется по условиям (2) и (4) для
регулятора 2 тока и (3) и (5) для регудятора 6 скорости.
Датчик 4 тока нагрузки состоит (фиг. 3) из усилителя 34, входных резисторов 35 и 36
и резистора 37 обратной связи. Инвертирующий вход усилителя 34 через резисторы 35 и 36 связан соответственно с первым и вторым входами датчика 4 тока нагрузки. Выход усилителя 34 является выходом датчика
04 тока нагрузки.
Формирователь 21 функции ошибки состоит (фиг. 4) из усилителей 38 и 39, входных резисторов 40-43, резисторов 44 и 45 обратной связи и конденсатора 46. Интегратор
5 реализован на усилителе 38, в цепь обратной связи которого по инвертирующему входу включен конденсатор 46, а по неинвертирующему - резистор 44 обратной связи. Усилитель 38 через резисторы 40 и 41,
0 подсоединенные к его неинвертирующему входу, связан соответственно с первым и вторым входами формирователя 21 функции ошибки. Усилитель 38 через резистор 43 подсоединен к входу инвертирующего уси5 лителя 39, в обратной связи которого включен резистор 45 обратной связи. Через резистор 42 усилитель 39 соединен с первым входом формирователя 21 функции ошибки. Выходы усилителей 38 и 39 являют0 ся соответственно вторым и первым выходами формирователя 21 функции ошибки.
Устройство работает следующим образом.
По сигналу задания скорости с командо5 аппарата 18 и сигналу с датчика 19 скорости на сумматоре 20 определяется сигнал скоростной ошибки. В формирователе 21 функции Ошибки по сигналу скоростной ошибки и сигналу управления управляемым преоб0 разователем 12 определяется сигнал производной скоростной ошибки, который используется вместе с сигналом с датчика 3 тока для определения в датчике 4 тока нагрузки, а также по сигналу скоростной
5 ошибки и ее производной формируется функция ошибки согласно уравнению (1). Сигнал функции ошибки перемножается на первом множителе 22 с сигналом скоростной ошибки, а на втором множителе 23 0 с сигналом тока нагрузки. В соответствии со знаком выходного сигнала первого 22 и второго 23 множителей в регуляторах 2 тока и 6 скорости подключаются коммутирующим элементом модуля 29 переменные козффи5 циенты усиления согласно условиям (2.) и (3). Величина коэффициентов усиления выбирается по условиям (4) и (5) с тем, чтобы обеспечить инвариантность скорости во всем диапазоне изменения возмущающего воздействия.
В зависимости от знака произведения сигнала функции ошибки (блок 21) и сигнала скоростной ошибки (20) (произведения функции ошибки с сигналом (блок 4) тока нагрузки), коммутирующий элемент модуля 29 включается или выключается и следовательно подключается то одна, то другая цепь.
В том случае, если суммарная температура электроприводов напора и подъема, определяемая датчиками 10,11 и 9, превышает заданное значение, определяемое вторым пороговым элементом 8, на втором сумматоре 5 происходит сложение сигналов с выхода второго порогового элемента 8, датчика 3 тока и функционального преобразователя 26. Сигнал на выходе функционального преобразователя 26 появляется при превышении температурой окружающего воздуха заданного значения, определяемого пороговым элементом 25. Если сумма превышает значение, определяемое первым пороговым элементом 7, то сигнал поступает на первый сумматор 1 и происхо- дит снижениетока якоря двигателя электропривода напора.
Положительный эффект по сравнению с прототипом достигается следующим образом.
При действии возмущающих воздействий (влияние зазоров в поворотном устройстве или в режиме жесткого стопорения ковша копающего механизма) за счет введения системы переменной структуры и организации скользящего режима обеспечивается эффективное снижение коэффициента динамичности механизмов, уменьшение динамических бросков тока на 40-50%, что приводит к увеличению производительности и надежности экскаватора. Кроме того, путем самонастройки величины тока отсечки в системе управления электропривода напора осуществляется адаптация к изменяющимся внешним условиям. При этом достигается увеличение ожидаемой эксплуатационной производительности экскаватора за счет снижения пере/рузок, а следовательно повышается надежность.
Формула изобретения
напора, датчики температуры электродвигателей напора и подъема, датчик скорости, второй пороговый элемент и датчик тока, соединенный с входом регулятора тока и 5 первым входом датчика тока нагрузки, отличающееся тем, что, с целью повышения надежности в работе экскаватора путем снижения динамических нагрузок, а также улучшения температурного режима элект0 ропривода, оно снабжено датчиком температуры окружающего воздуха, третьим пороговым элементом, вторым, третьим и четвертым сумматорами, функциональным преобразователем, двумя множителями и
5 формирователем функции ошибки, причем выход датчика температуры окружающего воздуха через последовательно соединенные третий пороговый элемент и функциональный преобразователь соединен с
0 первым входом второго сумматора, выход
датчика тока подключен также к второму
входу второго сумматора, выход которого
соединен с входом первого порогового
элемента, датчики тока электродвигателей
5 напора и подъема подключены к соответствующим входам третьего сумматора, выход которого через второй пороговый элемент подключен к третьему входу второго сумматора, выходы командоаппарата и датчика
0 скорости подключены к соответствующим входам четвертого сумматора, выход которого соединен с первыми входами первого множителя, регулятора скорости и формирователя функции ошибки, к второму вхо5 ду последнего подключен выход первого сумматора, первый выход формирователя функции ошибки подключен к второму входу первого множителя и первому входу второго множителя, к второму входу которого под0 ключей выход датчика тока нагрузки, а второй выход формирователя функции ошибки подключен к второму входу датчика тока нагрузки, выход первого множителя соединен с вторым входом регулятора скорости.
5
0 при этом входы интегратора и инвертирующего усилителя объединены и являются первым и вторым входами формирователя функции ошибки, первым и вторым выходами которого являются соответственно вы5 ход инвертирующего усилителя и выход интегратора.
Г
37
к 25
8ы.
34
-Iо
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
