Изобретение относится к системам управления электроприводами копающих механизмов одноковшового экскаватора, а именно к системам ограничения динамических на- грчзок в механизмах рабочего оборудования, и является дополнительным к авт. LB № 910956.
Целью изобретения является улучшение качества управления экскаватором при одновременном повышении его производительности
На фиг 1 представлена схема устройства; на фиг 2 - характеристики первого однополярного усилителя; на фиг 3 - характеристики второго однополярного усилителя; на фиг. 4 - механические характеристики привода подъема и зависимость мощности привода от усилия, развиваемого этим приводом.
Устройство для управления процессом копания содержит систему 1 управления приводом подъема, состоящую из последовательно соединенных регулятора 2 напряжения подъема и регулятора 3 тока подъема Система 1 управления подключена к преобразователю 4 подъема с присоединенным к нему двигателем 5 подъема. Система 6 управления приводом напора, состоящая из последовательно включенных регулятора 7 напряжения напора и регулятора 8 тока привода напора, подключена к преобразователю 9 с присоединенным к нему двигателем 10 напора Датчик 11 нагрузки привода подъема и датчик 12 производной нагрузки привода подъема подключены к входам первого одно- полярного усилителя 13, выход которого свЯ1ан с одним из входов второго одно- полярного усилителя 14. Источник 15 постоянного напряжения подключен к входам первого 13 и второго 14 усилителей, за- датчик 16 скорости привода подъема через развязывающий элемент 17, выполненный в виде диода, подключен к входу первого однополярного усилителя.
20
Устройство работает следующим образом.
При отсутствии сигналов на входе первого однополярного усилителя его характеристика имеет вид 13а (фиг. 2). Сигнал, снимаемый с источника 15 постоянного на5 пряжения, действует в сторону уменьшения выходного напряжения усилителя 13 и смещает его характеристику в положение 136. Этот сигнал выбирается пропорциональным стопорному усилию привода подъема. Сигнал с датчика 11 нагрузки привода подъема
0 направлен встречно сигналу с источника постоянного напряжения первого усилителя 13. При нагрузке на привод подъема больше заданной, на выходе первого однополярного усилителя 13 появляется напряжение, а при нагрузке меньше за5 данной - напряжение отсутствует.
Таким образом, первый усилитель 13 является по сути регулятором нагрузки привода подъема. Сигнал с датчика 12 производной нагрузки привода подъема устраняет колебательность тока якорной цепи привода напора.
Напряжение с выхода задатчика 16 скорости через диод 17 подается на вход первого усилителя 13. Диод 17 включен в направлении, пропускающем сигнал с по5 лярностью, соответствующей заданию на подъем ковша. Этот сигнал действует встречно сигналу с источника 15 постоянного напряжения Сигнал с задатчика 16 скорости с полярностью, соответствующей заданию на опускание ковша, диодом 17 на
0 первый усилитель 13 не пропускается. Величина сигнала задатчика 16 скорости на входе усилителя 13 выбирается из расчета, чтобы алгебраическая сумма сигналов с задатчика 16 скорости и источника 15 постоянного напряжения была пропорциональна усилию отсечки для соответствующей заданию на скорость механической характеристики привода подъема. Напряжение с выхода первого усилителя 13 поступает
0
5
ТО
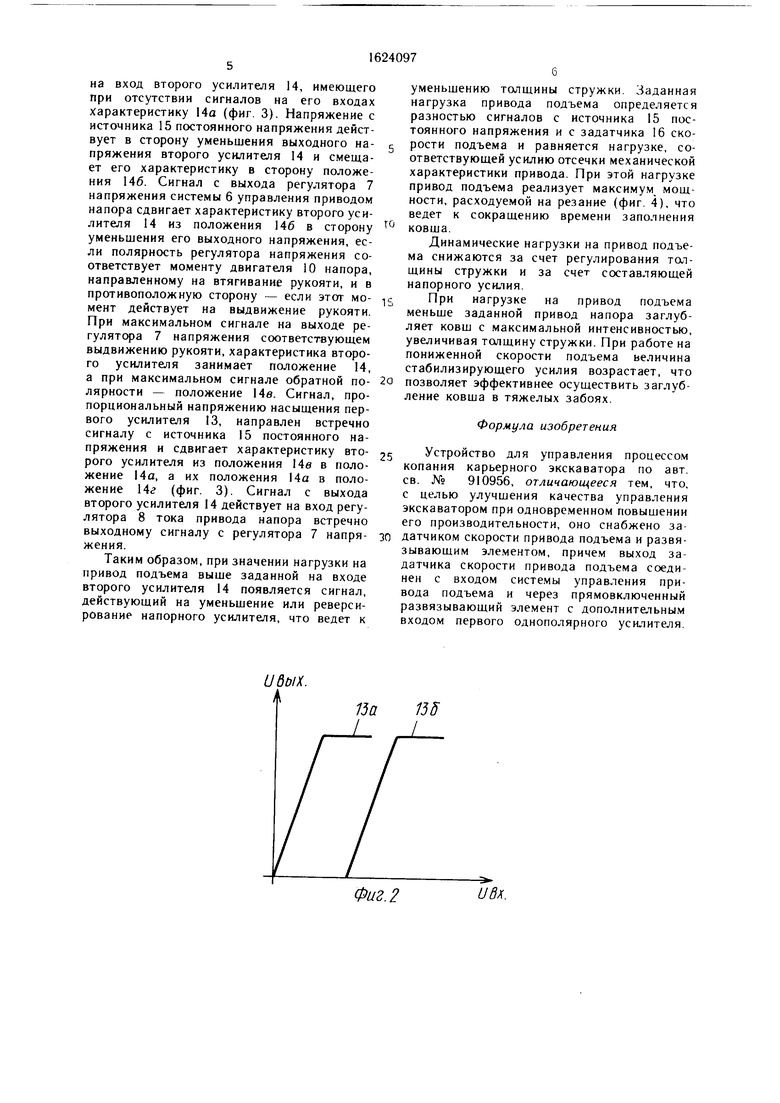
на вход второго усилителя 14, имеющего уменьшению толщины стружки Заданная при отсутствии сигналов на его входахнагрузка привода подъема определяется
характеристику 14а (фиг 3). Напряжение сразностью сигналов с источника 15 посисточника 15 постоянного напряжения деист-тоянного напряжения и с задатчика 16 сковует в сторону уменьшения выходного на- рости подъема и равняется нагрузке, сопряжения второго усилителя 14 и смеща- ответствующей усилию отсечки механической ет его характеристику в сторону положения 146. Сигнал с выхода регулятора 7 напряжения системы б управления приводом напора сдвигает характеристику второго усилителя 14 из положения 146 в сторону уменьшения его выходного напряжения, если полярность регулятора напряжения соответствует моменту двигателя 10 напора, направленному на втягивание рукояти, и в противоположную сторону - если этот мо- 1S мент действует на выдвижение рукояти. При максимальном сигнале на выходе регулятора 7 напряжения соответствующем выдвижению рукояти, характеристика второго усилителя занимает положение 14, а при максимальном сигнале обратной по- 2о позволяет эффективнее осуществить заглуб- лярности - положение 14в. Сигнал, про- ление ковша в тяжелых забоях порциональный напряжению насыщения первого усилителя 13, направлен встречно сигналу с источника 15 постоянного напряжения и сдвигает характеристику вто- 25 рого усилителя из положения 14в в положение 14а, а их положения 14а в положение 14г (фиг 3). Сигнал с выхода второго усилителя 14 действует на вход регулятора 8 тока привода напора встречно
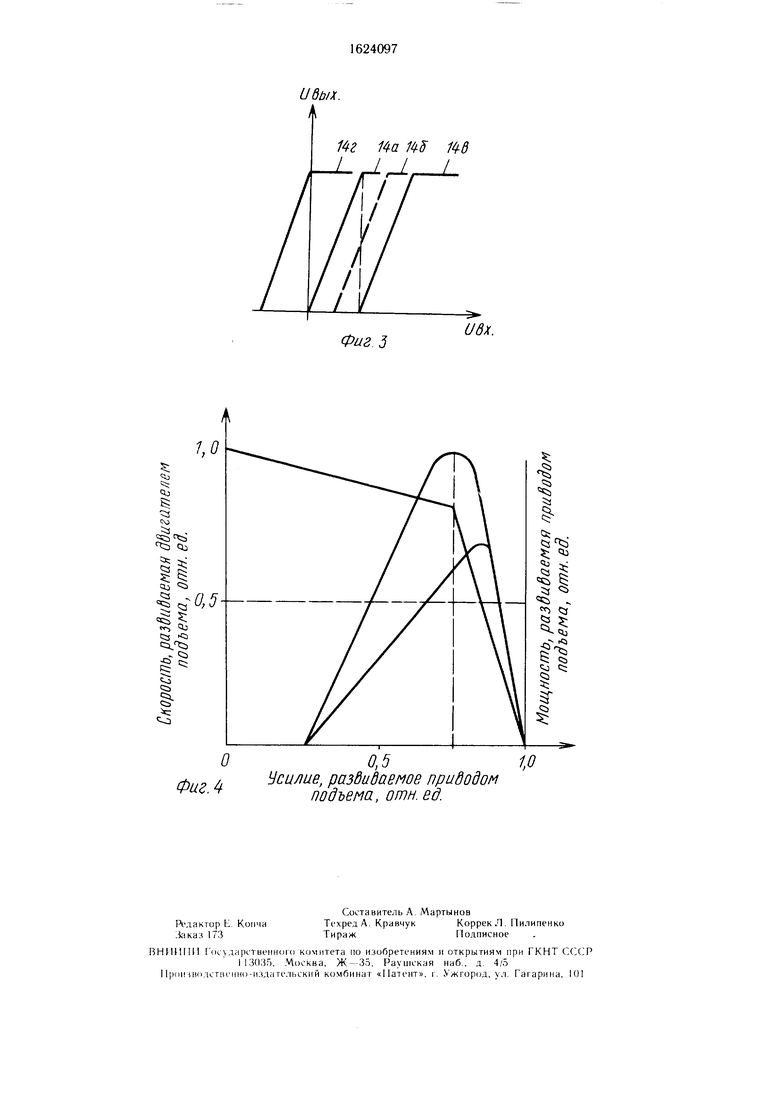
характеристики привода При этой нагрузке привод подъема реализует максимум мощности, расходуемой на резание (фиг 4), что ведет к сокращению времени заполнения ковша
Динамические нагрузки на привод подъема снижаются за счет регулирования толщины стружки и за счет составляющей напорного усилия
При нагрузке на привод подъема меньше заданной привод напора заглубляет ковш с максимальной интенсивностью, увеличивая толщину стружки. При работе на пониженной скорости подъема величина стабилизирующего усилия возрастает, что
Формула изобретения
Устройство для управления процессом копания карьерного экскаватора по авт св. № 910956, отличающееся тем, что, с целью улучшения качества управления экскаватором при одновременном повышении его производительности, оно снабжено за
выходному сигналу с регулятора 7 напря- 30 датчиком скорости привода подъема и развя- жения.
Таким образом, при значении нагрузки на привод подъема выше заданной на входе второго усилителя 14 появляется сигнал, действующий на уменьшение или реверсирование напорного усилителя, что ведет к
зывающим элементом, причем выход задатчика скорости привода подъема соединен с входом системы управления привода подъема и через прямовключенный развязывающий элемент с дополнительным входом первого однополярного усилителя
рости подъема и равняется нагрузке, соответствующей усилию отсечки механической позволяет эффективнее осуществить заглуб- ление ковша в тяжелых забоях
характеристики привода При этой нагрузке привод подъема реализует максимум мощности, расходуемой на резание (фиг 4), что ведет к сокращению времени заполнения ковша
Динамические нагрузки на привод подъема снижаются за счет регулирования толщины стружки и за счет составляющей напорного усилия
При нагрузке на привод подъема меньше заданной привод напора заглубляет ковш с максимальной интенсивностью, увеличивая толщину стружки. При работе на пониженной скорости подъема величина стабилизирующего усилия возрастает, что
ъема и равняется наг щей усилию отсечки ме эффективнее осуществи а в тяжелых забоях
Формула изобретения
рости подъема и равняется нагрузке, соответствующей усилию отсечки механической позволяет эффективнее осуществить заглуб- ление ковша в тяжелых забоях
Устройство для управления процессом копания карьерного экскаватора по авт св. № 910956, отличающееся тем, что, с целью улучшения качества управления экскаватором при одновременном повышении его производительности, оно снабжено за
датчиком скорости привода подъема и развя-
датчиком скорости привода подъема и развя-
зывающим элементом, причем выход задатчика скорости привода подъема соединен с входом системы управления привода подъема и через прямовключенный развязывающий элемент с дополнительным входом первого однополярного усилителя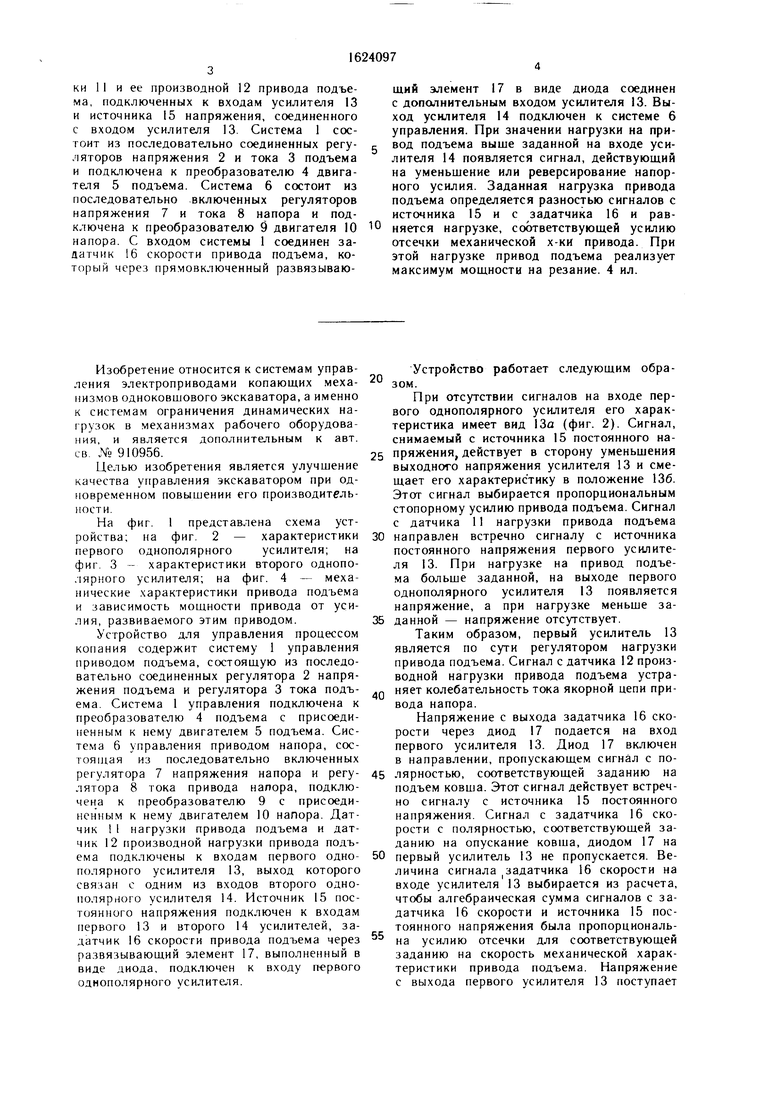
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом копания карьерного экскаватора | 1986 |
|
SU1425284A2 |
| Устройство для управления процессом копания карьерного экскаватора | 1980 |
|
SU910956A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1975 |
|
SU595463A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для управления процессом компания одноковшового экскаватора | 1976 |
|
SU617546A1 |
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Способ управления процессом копания одноковшового экскаватора | 1978 |
|
SU732465A1 |
Изобретение относится к системам ограничения динамических нагрузок в механизмах рабочего оборудования одноковшового экскаватора. Цель - улучшение качества управления экскаватором при одновременном повышении его произв-сти Устр- во состоит из систем 1 и 6 управления приводом подъема и приводом напора, двух последовательно соединенных однопо- лярных усилителей 13, 14, датчиков наюуз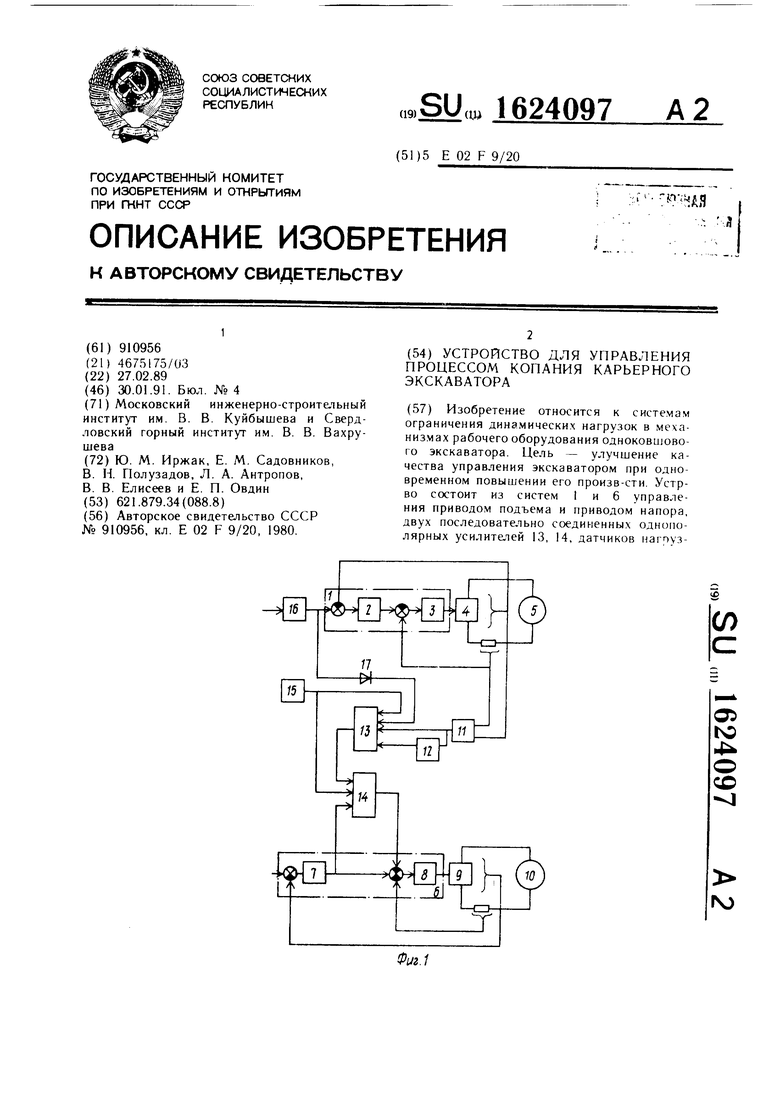
135
Фиг. 2
Фиг. 3
ФигЛ
Усилие, развиваемое приводом подъема, отн. ед.
| Устройство для управления процессом копания карьерного экскаватора | 1980 |
|
SU910956A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
