Изобретение относится к испытательной технике и может быть использовано для моделирования режимов движения объекта, включая разгон, торможение, аварийные ситуации (столкновение, потери устойчивости и др.).
Известно устройство для моделирования параметров движения, содержащее станину, размещенный наней ротор с вертикальной осью вр ащения, установленную на нем платформу для крепления испытуемых объектов и устройство для изменения ориентации платформы ClJНедостатком данного устройства является невысокая точность задания режимов движения, обусловленная влиянием внешней среды (температуры, давления, обдува, влажности) при испытаниях. .
Наиболее близким к предлагаемому по технической сущности является стенд для моделирования параметров движения, содержащий основание, ротор с вертикальной осью врагцения,ИJ::тoчник сжатого газа, привод ротора, -кассеты для крепления испытуемых объектов, установленные на поворотной платформе с горизонтальной осью вращения, привод поворотно платформы, токосъемник, датчик угд,а и цифровую управляющую машину 2.
Недостатком известного устройств является сравнительно невысокая точность задания режимов движения, обусловленная влиянием внешних фак торов (колебания температуры, обяув влажность и давление, а также вибрациями , вызываемыми турбулентностью потока воздуха при обтекании кассет I
Цель изобретения - повышение точности задания режкмов движений.
Указанная цель достигается тем, что в устройство для моделирования параметров движения/ содержащее основание, ротор с вертикальной осью вращения, источник сжатого газа, привод ротора, кассеты для крепления испытуемых объектов, установленные на поворотной платформе с горизонтальной осью вращения, привод повороной платформы, токосъемник, датчик угла и цифровую управляющую мамину, введены герметичная капсула с установленной в ней на аэростатических подшипниках поворотной платформой и снабженная дренажным клапаном, а также газопровод с газовой муфтой, связывающий аэростатические подшипники платфог 1Ы с источником сжатого газа, измеритель угловой скорости вращения платформы и дополнительный токосъемник, свя.зываюиий испытуемые объекты с цифровой управляющей машиной.
Дренажный клапан размещен в хвостовом обтекателе герметичной капсулы и выполнен в виде кольцевой канавки с упругим бандажом, снабженной выпускными отверстиями, причем бандаж укреплен по периметру, обращенному в сторону носового обтекателя.
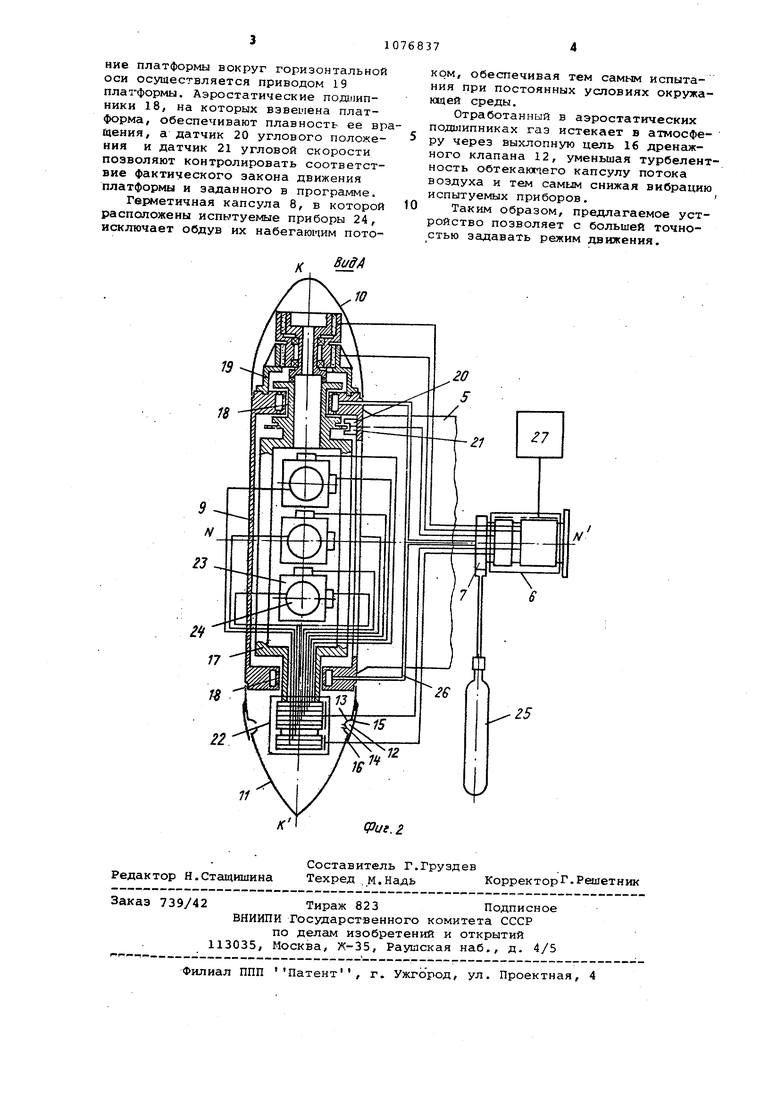
На фиг. 1 показано устройство, общий вид; на фиг.2 - вид А на фиг.
На основании 1 установлена станина 2, на которой укреплены ротор 3 на подшипниках с газовой смазкой и привод 4. Ротор 3 снабжен плечом 5. На основании 1 соосно с ротором 3 установлены токосъемник б и газовая муфта 7 (на фиг.2 токосъемник 6 и газовая муфта 7 условно повернуты на 90°).
На конце плеча 5 закреплена гермтичная капсула 8, состоящая из корпса 9 и состыкованных с ним носового обтекателя 10 и хвостового обтекателя 11. Хвостовой обтекатель 11 снабжен дренажным клапаном 12, состоящим из кольцевой канавки 13 с выпускнами отверстиями 14 и упругим бандажом 15. Упругий бандаж 15, расположенный над канавкой, под воздействием избыточного давления в геметичной капсуле 8 образует с наружной поверхностью обтекателя 11 кольцевую выхлопную щель 16.
В корпусе 9 герметичной капсулы 8 установлена поворотная платформа 17 с помощью аэростатических подшипников 18. На корпусе 9 укреплен приврд 19, а также датчик 20 углового пложения, датчик 21 угловой скорости и дополнительный токосъемник 22. В установленные на поворотной платформе 17 кассеты 23 крепятся испытуемые приборы 24.
Источник сжатого газа 25, располженный на основании 1 -, посредством газопровода 26 и газовой муфты 7 соединен с аэростатическими подшипниками 18.
цифровая управлякщая маошна 27 через токосъемник 6 соединена с датчиком 20 углового положения, датчиком 21 угловой скорости и приводом 19 поворотной платфогмы.
Устройство работает следующим образом.
Ротор 3 с капсулой 8 и укрепленными в ней на поворотной платформе 17 испытуемыми приборами 24 разгоняется до необходимой постоянной угловой скорости, в соответствии с заданной цифровой управлякщей машине 27 программой осуществляется разворот платформы 17 вокруг горизонтальной оси, при этом по требуемому закону изменяется- действунвдее по оси чувствительности испытуемых приборов 24 ускорение. Враще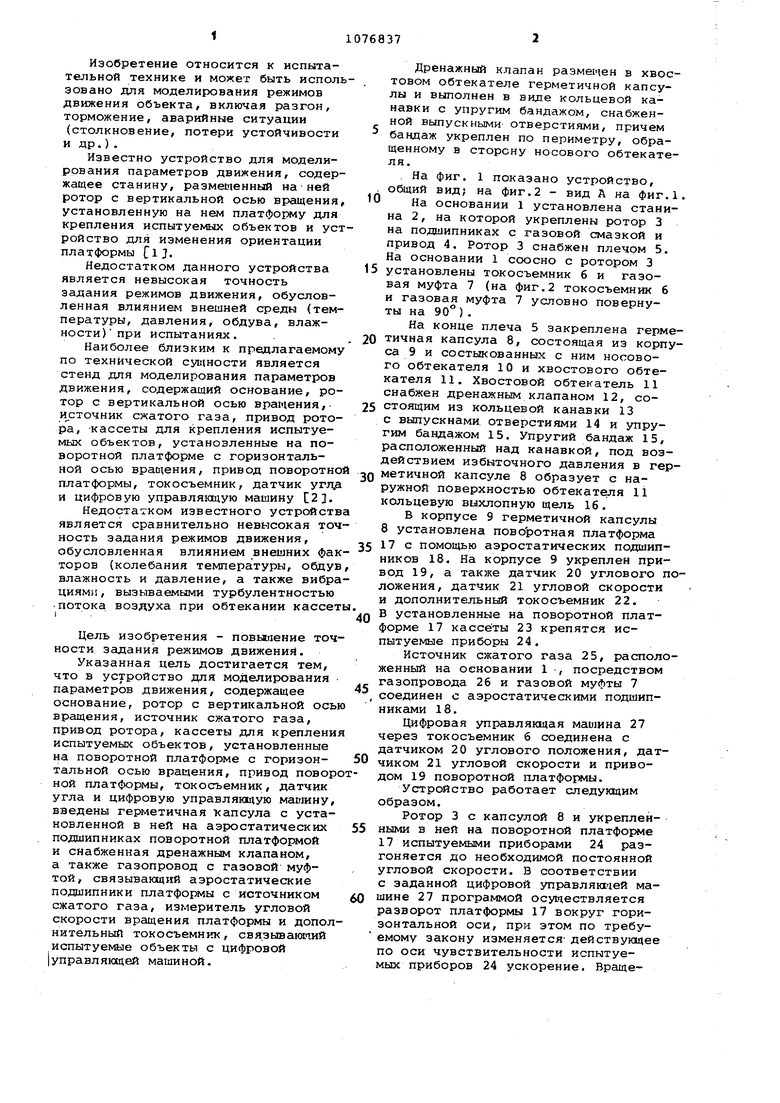
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный стенд для моделирования параметров движения | 1974 |
|
SU659953A1 |
| Центрифуга | 1973 |
|
SU476515A1 |
| Поворотный стол с газостатической опорой | 2022 |
|
RU2788876C1 |
| Токосъемник | 1981 |
|
SU989636A1 |
| Центрифуга | 1980 |
|
SU879366A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545062C1 |
| Способ и устройство для многократного вывода в космос и возвращения негабаритного груза и способ использования негабаритного груза на других планетах | 2012 |
|
RU2627902C2 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
1. УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПАРАМЕТРОВ ДВШСЕНИЯ, содержащее основание, ротор с вертикальной осью вращения, источник сжатого газа, привод ротора, кассеты для крепления испытуеь-ах объектов, установленные на поворотной платформе с горизонтальной осью вращения, привод поворотной платформы, токосъемник , датчик угла и цифровую управляющую маишну, отличающееся тем, что, с целью повышения точности задания режимов дви- . женин, в него введены герметичная капсула с установленной в ней на аэростатических подшипниках- поворотной платфо1)мой, снабженная. дренажным клапаном, а также газопровод с газовой муфтой, связьшающий аэростатические подшипники платформы с источником сжатого газа, измеритель У-Гловой скорости вращения платфохяяы и дополнительный токосъемник, включенный в цепь между испытуемыми объектами и управляющей цифровой машиной. 2. Устройство по п. 1, отличающееся тем, что дренажный клапан размещен в хвостовом обтекаiS теле герметичной капсулы и выполнен в виде кольцевой канавки с упругим бандажом, снабженной выпускными с отверстиями, причем бандаж укрёшаен по периметру со стороны носового обтекателя. | л 00 со Ipi/e.f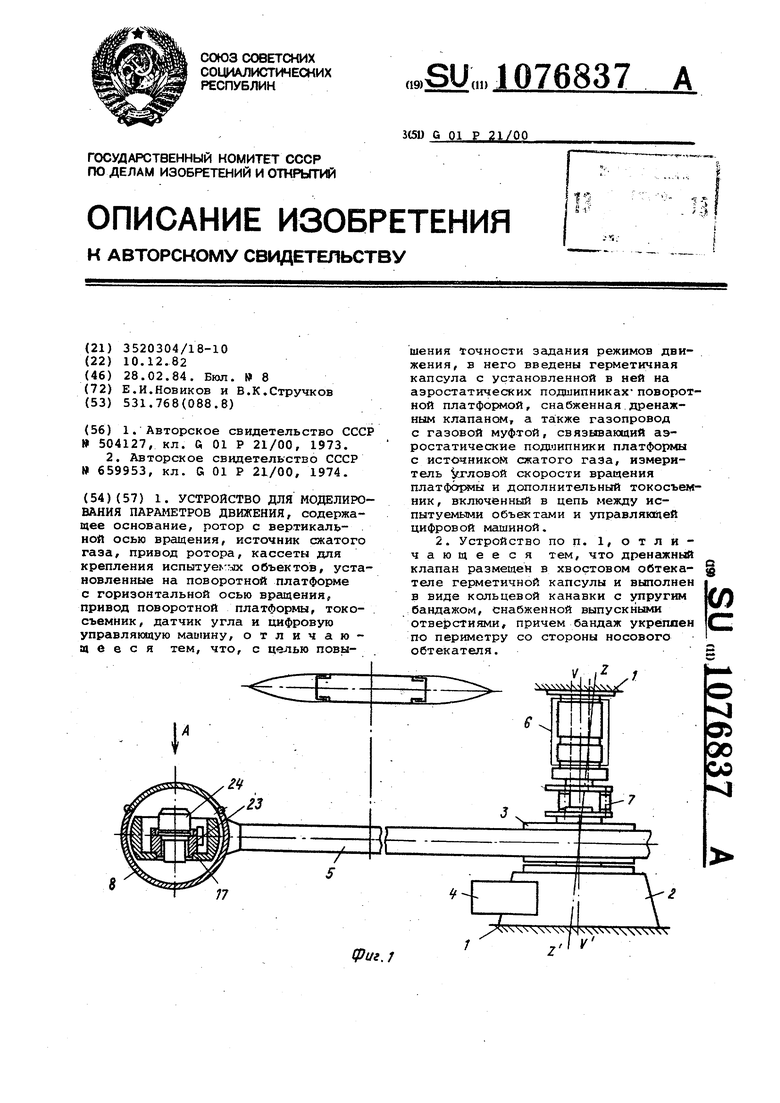
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Центробежный стенд для испытаний изделий на линейные ускорения | 1973 |
|
SU504127A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
