1
Изобретение относится к испытательной технике. Оно может быть использовано для испытания объектов на воздействие центробежного ускорения.
Известны устройства для испытания различных объектов на воздействие центробежного ускорения 1.
Наиболее близким но технической сун;иости является устройство, содержан1,ее основание, ротор с вертикальной осью вращения, привод ротора, кассеты для крепления исиытуемых объектов, токосъемник и пульт управления.
Задавая угловые скорости вращения, можно воспроизводить на поворотных платформах в горизонтальной плоскости различные, не связанные между собой во времени, элементы движения.
Однако в известном устройстве необходимо осуществлять синхронизацию в каждой точке. Кроме того, в нем наблюдаются переходные процессы при синхронизации, создающие значительные искажения в задаваемых режимах движения, а также изменения величины и знака задаваемой величины ускорения при установке заданной точки характеристики по причине изменения (нри вращении или повороте вокруг вертикальной оси платформы) пространственного положения испытуемых объектов
относительно плоскости, в которой действует вектор центробелчного ускорения, задаваемые центрифугой (плоскость, образованная вертикальной осью вращения и радиусом плеча центрифуги).
Все это не дает возможности применить его для испытаинй объектов иа воздействие связанных между собой элементов (режимов) движения в реальном масштабе врсмени но заданному закону 2.
Целью изобретения является обеспечение задания режимов движения в реальном масштабе времени по задаиному закону. Для этого в центробежном стенде для
моделирования параметров движения, содержащем основание, ротор с вертикальной осью вращения, привод ротора, токосъемник и пульт управления, кассета снабл ;ена поворотным валом, скрепленным с ротором
управляемого двигателя и датчика угла, вв.воды которых через токосъемник подключены к пульту управления, вынолненного в виде цифровой управляющей машины.
В результате использования указанных отличительных признаков предложенное устройство обеспечивает задание различных режргмов движения для воспроизведения как простых элементов двил-;ення, так
и весьма сложных, например разгон объекта по заданному закону (линейному, синусоидальному и др.) с изменением направления ускорения (реверс) в реальном масштабе времени, с имитацией аварийных режимов (столкновений, потери устойчивости и т. д.).
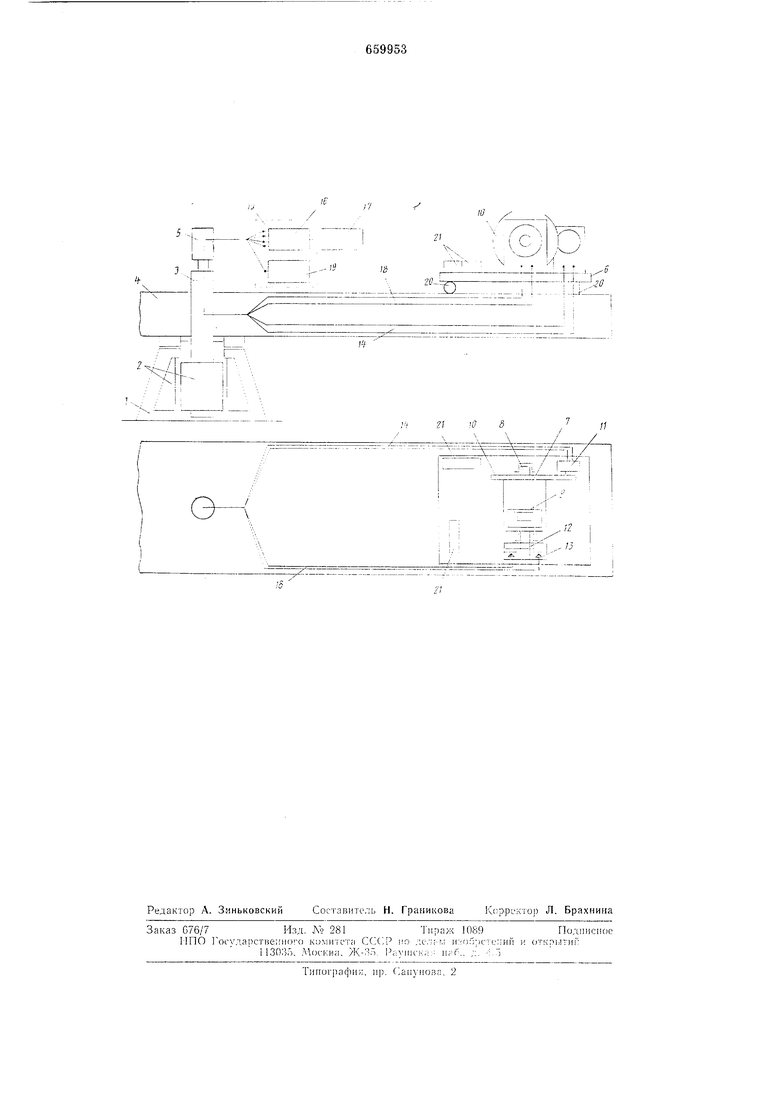
На чертеже приведена схема конструкции стенда.
Центробежный стенд для моделирования параметров движения содержит неподвижную стапину 1, цривод 2 центрифуги, вертикальную ось 3 вращения центрифуги, ротор 4, токосъемник 5, базовые платформы 6, кассету 7, выполненную в виде поворотно-угломерного устройства (стола) для крепления испытуемого объекта, в которую входят ось 8 вращения кассеты, кронштейн 9 для крепления испытуемых объектов, ведущее колесо 10, поворотный привод И, угломерный диск 12, считывающая головка 13, соединительные провода 14, пульт управления 15, программный регулятор 16 напряжения, источник электроэнергии 17, соединительные провода 18 считывающей головки 13, регистратор 19 углового полол епия кассеты 7, устройство 20, предназначенное для выставки базовой платформы 6, уровни 21 горизонта.
На неподвижной станине 1 установлен электромеханический привод 2 с вертикальной осью вращения 3, на которой укреплен ротор 4. На оси 3 установлен токосъемник 5, служащий для обеспечения электрической связи элементов, установленных на вращающемся роторе 4 и на неподвижном пульте управления 15.
На плечах ротора 4 установлены базовые платформы 6 с устройством 20. На каждой базовой платформе 6 установлены уровни 21 и кассета 7 для крепления испытуемых объектов, выполненная в виде поворотно-угломерного устройства. Кассета 7 выполнена следующим образом.
На оси 8 вращения кассеты 7 укреплены ведущее колесо 10, соединенные с приводом И кронштейн 9 и угломерный диск 12. Соосно с угломерным диском 12 на базовой платформе 6 установлена считывающа-л головка 13, выход которой подключен соединительными проводами 18 через токосъемпик 5 к регистратору 19, устанонлспному в пульте управления 15.
Поворотный привод 11 подключен соединительнымп проводами 14 через токосъемник 5 и программный регулятор 16 к источнику электроэнергии 17, установленных в пульте управления 15.
Устройство работает следующим образом.
Этап подготовки. На этом этапе составляют программу задания режима движения в реальном масщтабе времени по задапному закону, устанавливают объекты
на базовой платформе 6, производят их выставку в горизонт с помощью устройства 20, осуществляют пуск центрифуги, разгон до заданной скорости вращения, синхронизацию и стабилизацию угловой скорости вращения.
Этап воспроизведения заданного режима движения. На этом
этапе производится поворот кассеты 7, на которой укреплены испытуемые объекты на заданный угол в поле центробежного ускорения центрифуги. Выполнение кассеты 7 в виде поворотно-угломерного устройства позволяет обеспечить поворот ее, а следовательно, и испытуемых объектов, на угол ±350° и с возможностью реверса и фиксации в любой точке.
Поворот кассеты 7 может быть выполнен
за весьма короткое время, легко управляется и контролируется. Это обеспечивает возможность задания как нростого, так и весьма сложного режима движения объектов в реальном масштабе времени с высокой точностью по заданной программе.
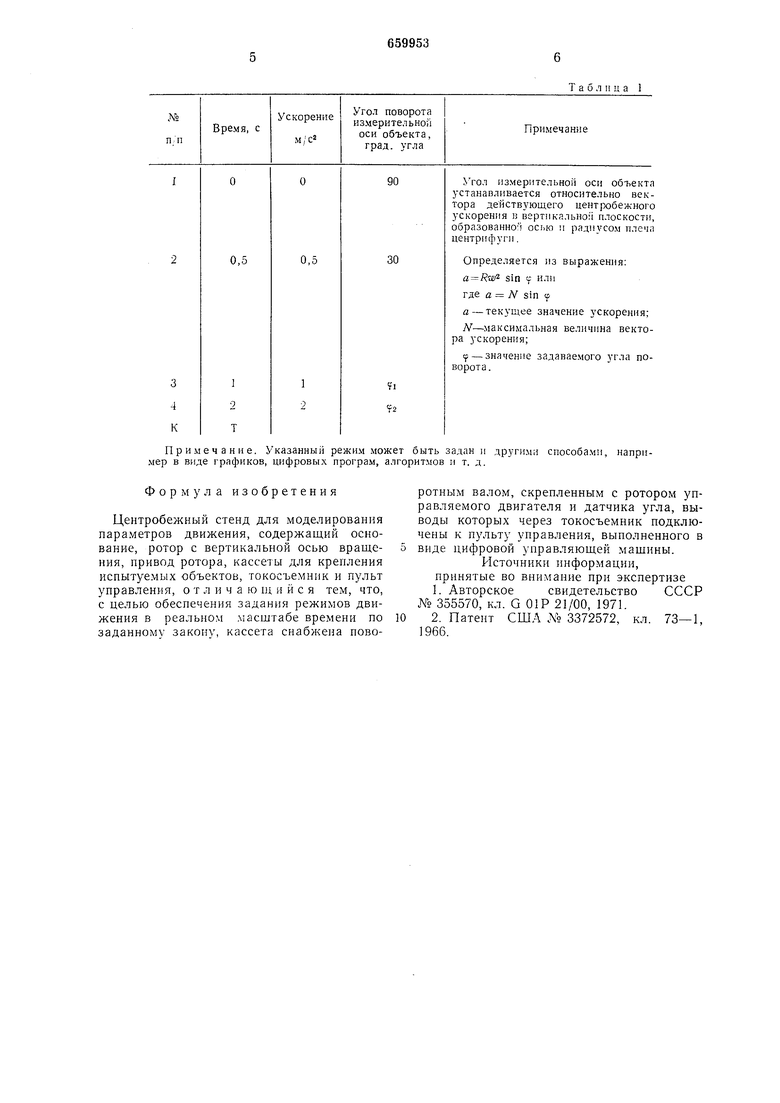
Например, требуется воспроизвести режим разгона объекта по ускорению в диапазоне от О м/с до N м/с при линейном возрастании ускорения в интервале времени от О до Т с.
Программа задания режима приведена в табл. 1.
Кассета 7, установленная на базовой платформе 6 в положении нулевой чувствительности (для испытуемых объектов) поворачивается (с помощью подачи напряжения от источника электроэнергии 17 через программный регулятор 16 и токосъемник 5 на поворотный привод И) на угол 90° с
ускорением от О м/с до N м/с по синусоидальному закону.
Информация о величине и скорости поворота кассеты 7 снимается с регистратора 19.
После проведения поворота кассеты 7, снятия и фиксации результатов задания режима второй этап заканчивается, и центрифугу останавливают. Закон задания движения может быть весьма сложным с пзмепением времени задания, реверса, повторепия и т. д.
Максимальная скорость задания режима определяется максимально возможной скоростью поворота кассеты на заданный угол.
Для уменьшения погрешностей от изменения «длины плеча центрифуги центр масс испытуемых объектов необходимо размещать на оси вращения кассеты 7.
Учет влияния составляющей гравитационного поля Земли необходимо производить, исходя из измерения углового положения испытуемого объекта относительно вектора гравитационного поля.
Таблица 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования параметров движения | 1982 |
|
SU1076837A1 |
| Центрифуга | 1980 |
|
SU879366A1 |
| Устройство для задания положения объекта в пространстве | 1981 |
|
SU953460A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕКТОРА ЛИНЕЙНОГО УСКОРЕНИЯ | 2005 |
|
RU2302009C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ КОМПЛЕКСНЫХ ИНЕРЦИОННЫХ ВОЗДЕЙСТВИЙ | 2003 |
|
RU2244312C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Способ испытания мобильных боевых робототехнических комплексов и стенд для его осуществления | 2016 |
|
RU2630860C1 |
| Стенд линейных ускорений | 1975 |
|
SU583398A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| Устройство для задания и регулируемого изменения наклона | 1980 |
|
SU909569A1 |
Примечание. Указанный режим может быть задан и мер в виде графиков, цифровых програм, алгоритмов и т. д.
Формула изобретения
Центробежный стенд для моделирования параметров движения, содержащий основание, ротор с вертикальной осью враш,ения, привод ротора, кассеты для крепления испытуемых объектов, токосъемник и пульт управления, отличающийся тем, что, с целью обеспечения задания режимов движения в реальном масштабе времени по заданному закону, кассета снабжена поворотным валом, скрепленным с ротором управляемого двигателя и датчика угла, выводы которых через токосъемник подключены к пульту управления, выполненного в виде цифровой управляющей машины.
Источники информации, принятые во внимание при экспертизе
