Изобретение относится к измерительной технике, а именно к средствам контроля гироскопических измерителей угловой скорости (ИУС).
Известен стенд для контроля прецизионных датчиков угловых скоростей [13], содержащий корпус; вал, закрепленный на корпусе с возможностью вращения; двигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов; устройство питания элементов, блок преобразования напряжения питания, блок преобразования информации, содержащий аналого-цифровой преобразователь и программируемую логическую интегральную схему, шина блока преобразования информации, микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу, закрепленных на вале; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения вала, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости; управляющий процессор, содержащий в том числе порты ввода - вывода и ядро с дополнительной периферией, аналого-цифровой и цифро-аналоговые преобразователи, выполненные встроенными в процессор или являющиеся внешними устройствами по отношению к процессору; усилитель мощности, вход которого соединен с выходом цифроаналогового преобразователя, соединенного своим входом с первым портом ввода - вывода управляющего процессора, а выход усилителя мощности соединен с входом системы управления двигателем постоянного тока; систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс со вторым портом ввода - вывода управляющего процессора; угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены с третьим портом ввода - вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором, при этом в качестве инерциального чувствительного элемента, одновременно являющегося испытываемым прибором, использован прецизионный гироскопический измеритель угловой скорости любого типа.
В известном стенде с измерителем угловой скорости любого типа в качестве инерциального чувствительного элемента и цифровой системой управления, где контролируемый ИУС одновременно является и чувствительным элементом, и испытуемым прибором, т.е. находится в режиме «самоконтроля», были достигнуты следующие положительные результаты по сравнению с ранее известными аналогами:
1. обеспечивалась универсальность стенда, так как без конструктивных изменений, только за счет перепрограммирования процессора, можно было обеспечить самоконтроль гироскопического датчика угловой скорости любого физического принципа действия;
2. были уменьшены моменты трения в оси вращения стенда, т.е. повышена стабильность задания угловой скорости за счет исключения из конструкции стенда информационных колец токоподводящего коллектора (оставлены кольца для подвода питания) и введения в систему управления стенда беспроводной системы съема и передачи информации с помощью радиочастотных или инфракрасных информационных средств;
3. была исключена зависимость точностных характеристик стенда от типа инерциального чувствительного элемента, примененного в качестве измерительного датчика угловой скорости, так как в предлагаемой схеме был обеспечен самоконтроль датчика угловой скорости, являющегося одновременно и чувствительным элементом, и испытуемым прибором, что также снижало себестоимость стенда.
4. применение радиочастотного или инфракрасного информационного канала позволяло существенно сократить число соединений в электрической схеме стенда, и при этом исключались ошибки передачи данных, возникающие вследствие возможной потери контакта в щеточном узле токоподводящего коллектора.
Несмотря на вышеприведенные достоинства, аналог не свободен от недостатков, заключающихся в следующем:
1. в качестве информации об угловой скорости, задаваемой стендом, используются лишь две: от углового энкодера и самого инерциального чувствительного элемента;
2. в качестве бесконтактной передачи информации использовались лишь радиочастотный и инфракрасный каналы.
3. в стенде не было разгрузки оси подвеса от вредных моментов сопротивления, серьезно влияющих на точностные характеристики стенда.
Наиболее близким к заявляемому объекту аналогом по совокупности существенных признаков является стенд [14], содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель и два усилителя мощности, дополнительную платформу, закрепленную на валу, шесть акселерометров линейных ускорений, три из которых измеряют тангенциальное, а три - центростремительное ускорения точек их крепления к платформе стенда, оси чувствительности которых расположены под углами 120° друг относительно друга для каждой тройки акселерометров, причем каждый из акселерометров имеет датчик угла, датчик момента и усилитель обратной связи, представляющий собой аналоговое или цифровое устройство, а выходная информация каждого акселерометра представляет собой аналоговый или цифровой сигнал; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения вала, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости; управляющий процессор, содержащий в том числе порты ввода-вывода и ядро с дополнительной периферией, аналого-цифровой и цифро-аналоговые преобразователи, выполненные встроенными в процессор или являющиеся внешними устройствами по отношению к процессору; систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре; микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу, причем направление передачи информационного сигнала коллинеарно оси вращения стенда и направлено сверху вниз; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором в основании стенда, причем направление приема сигнала также коллинеарно оси вращения стенда и направлено снизу вверх, при этом вход преобразователя напряжения питания через линии упругого торцевого токоподвода и контакты коллектора соединен с выходом стационарного источника питания, а выходы преобразователя напряжения соединены с соответствующими входами блоков, закрепленных на вале; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс с портом ввода-вывода управляющего процессора; угловой энкодер, содержащий диск и две считывающие оптические головки, которые через преобразователь сигнала соединены с портом ввода-вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления диска углового энкодера на выходную информацию об угловом положении платформы стенда.
В известном стенде были достигнуты следующие положительные результаты по сравнению с прототипом:
1. Обеспечивается универсальность стенда, так как без конструктивных изменений, только за счет перепрограммирования процессора, можно обеспечить использование в качестве инерциальных чувствительных элементов стенда измерителей угловых скоростей и линейных ускорений любого физического принципа действия;
2. Уменьшены моменты трения в оси вращения стенда, т.е. повышена стабильность задания угловой скорости за счет исключения из конструкции стенда информационных колец токоподводящего коллектора (оставлены два кольца для подвода питания) и введения в систему управления стенда беспроводной системы съема и передачи информации с помощью радиочастотных или инфракрасных информационных средств.
3. Применение углового энкодера в качестве управляющего устройства позволяет обеспечить третий режим работы стенда на высоких скоростях до 10000°/с, когда управление осуществляется по сигналам с углового энкодера и трех акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда. Несмотря на отмеченные достоинства, прототип, тем не менее, обладал некоторыми недостатками, заключающимися в следующем:
1. Применение одного измерителя угловой скорости в контуре управления стендом не обеспечивало избыточности в системе по измерителям угловой скорости;
2. Механизм отслеживания, реализованный в стенде для уменьшения моментов трения по оси подвеса стенда, имел достаточно сложную конструкцию;
3. Прецизионные акселерометры, применяемые в качестве инерциальных чувствительных элементов, имели диапазон измерения не более 10 g, так как применение акселерометров более широкого диапазона измерения вело к загрублению их точностных характеристик.
Технический результат достигается тем, что в стенд для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель и два усилителя мощности, дополнительную платформу, закрепленную на валу, шесть акселерометров линейных ускорений, три из которых измеряют тангенциальное, а три - центростремительное ускорения точек их крепления к платформе стенда, оси чувствительности которых расположены под углами 120° друг относительно друга для каждой тройки акселерометров, причем каждый из акселерометров имеет датчик угла, датчик момента и усилитель обратной связи, представляющий собой аналоговое или цифровое устройство, а выходная информация каждого акселерометра представляет собой аналоговый или цифровой сигнал; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения вала, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости; управляющий процессор, содержащий в том числе порты ввода-вывода и ядро с дополнительной периферией, аналого-цифровой и цифроаналоговые преобразователи, выполненные встроенными в процессор или являющиеся внешними устройствами по отношению к процессору; систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре; микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу, причем направление передачи информационного сигнала коллинеарно оси вращения стенда и направлено сверху вниз; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором в основании стенда, причем направление приема сигнала также коллинеарно оси вращения стенда и направлено снизу вверх, при этом вход преобразователя напряжения питания через линии упругого торцевого токоподвода и контакты коллектора соединен с выходом стационарного источника питания, а выходы преобразователя напряжения соединены с соответствующими входами блоков, закрепленных на вале; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс с портом ввода-вывода управляющего процессора; угловой энкодер, содержащий диск и две считывающие оптические головки, которые через преобразователь сигнала соединены с портом ввода-вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления диска углового энкодера на выходную информацию об угловом положении платформы стенда, введен второй прецизионный измеритель угловой скорости, а в системы управления датчиков угловой скорости и акселерометров введены фильтры, полоса пропускания которых обеспечивает вырезание высокочастотных и низкочастотных колебаний, в том числе повышенной амплитуды на резонансных частотах, возбуждаемых при работе аэростатического подвеса [26], причем в качестве первого измерителя угловой скорости использован прецизионный измеритель угловой скорости, обладающий широким диапазоном измерения угловых скоростей с достаточно широкой полосой пропускания, в обратную связь которого введен фильтр, обеспечивающий вырезание высокочастотных помех, возбуждаемых аэростатическим подвесом [2, 6, 18, 21, 22, 26, 27], а в качестве второго измерителя угловой скорости используется прецизионный поплавковый гироскопический измеритель угловой скорости с газодинамической опорой ротора и магнитным центрированием его подвеса [19, 20, 23, 24], обладающий узким диапазоном измерения угловых скоростей и достаточно узкой полосой пропускания, в обратную связь которого введен фильтр [2, 3, 7], обеспечивающий вырезание низкочастотных помех, возбуждаемых аэростатическим подвесом, причем оба измерителя угловой скорости выполнены с возможностью работы как инерциальными чувствительными элементами стенда, так и с возможностью нахождения в режиме «самоконтроля» [8, 13], кроме того, в качестве прецизионного измерителя линейных ускорений, измеряющего тангенциальное ускорение точек их крепления к платформе стенда, использован прецизионный измеритель линейных ускорений [10, 12], обладающий узкой полосой пропускания и небольшим диапазоном измерения ускорений для измерения и компенсации колебаний платформы от вредных моментов по оси вращения, а в качестве прецизионного измерителя линейных ускорений, измеряющего центростремительное ускорение точек их крепления к платформе стенда [10, 11, 12], использован прецизионный измеритель линейных ускорений, обладающий широкой полосой пропускания и большим диапазоном измерения ускорений для измерения центростремительного ускорения, в усилители обратной связи измерителей тангенциального ускорения введены фильтры, вырезающие низкочастотные помехи, возбуждаемые аэростатическим подвесом, а в усилители обратной связи измерителей центростремительных ускорений введены фильтры, вырезающие высокочастотные помехи, возбуждаемые аэростатическим подвесом.
Совокупность существенных признаков, характеризующих заявляемое техническое устройство, позволяет в сравнении с прототипом достичь технического результата, заключающегося в следующем:
1. Повысить точность измерения мгновенной угловой скорости стендом за счет введения второго прецизионного измерителя угловой скорости в его систему управления и комплексирования информации с другими первичными измерителями;
2. Повысить точность и расширить диапазон измерения угловой скорости за счет применения прецизионного акселерометра с расширенным диапазоном измерения;
3. Снизить трение по оси подвеса стенда за счет применения малогабаритных аэростатических опор;
4. Введение фильтров в обратные связи измерителей угловой скорости и линейного ускорения позволяет исключить влияние на точностные характеристики стенда вибрационных возмущений в широком спектре частот, возбуждаемых аэростатическим подвесом.
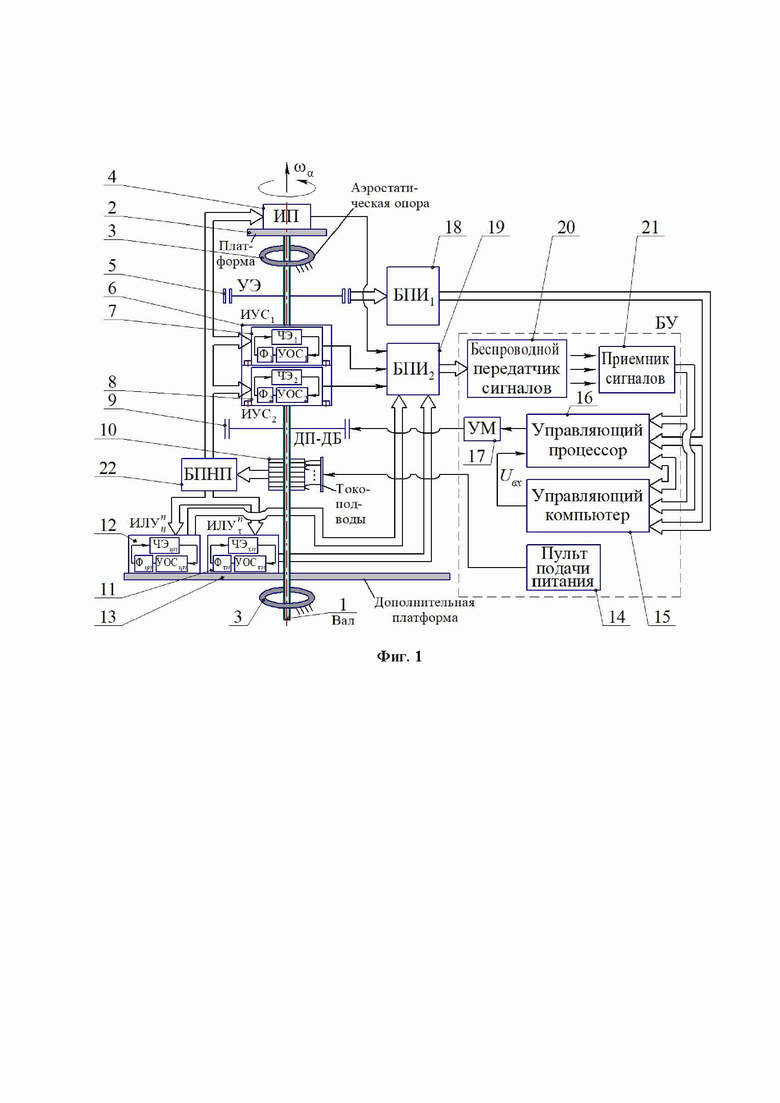
На фиг. 1 представлена функционально - кинематическая схема предлагаемого стенда.
Предлагаемое устройство содержит корпус (на фиг. 1 не показан), вал 1, имеющий ось вращения относительно корпуса, реализованную на аэростатических опорах 3, которая является выходной осью стенда. На валу 1 закреплена платформа 2, предназначенная для установки испытуемого прибора 4, а также чувствительные элементы стенда: акселерометры 11, 12 и измерительные датчики угловой скорости - 7, 8. Конструктивно это выполнено так, что на валу 1 закреплена дополнительная платформа 13, на которой размещены все чувствительные элементы. При этом акселерометры 11 в количестве трех закреплены так, что измеряют тангенциальное ускорение точек их крепления к платформе 13 стенда. (Для этих акселерометров введены обозначения 1τ, 2τ, 3τ). В дальнейшем эти акселерометры (1τ, 2τ, 3τ) будут называться тангенциальными [8]. Ось чувствительности каждого акселерометра 11 перпендикулярна радиусу R1 дополнительной платформы 13. Радиусы R1 акселерометров 11 (1τ, 2τ, 3τ) расположены под углами 120°. Акселерометры 12 в количестве трех закреплены на дополнительной платформе 13 так, что они измеряют центростремительное ускорение точек их крепления к платформе 13 стенда. (Для этих акселерометров введены обозначения 1ц, 2ц, 3ц). В дальнейшем эти акселерометры (1ц, 2ц, 3ц) будут называться центростремительными [8]. Ось чувствительности каждого из акселерометров 12 расположена вдоль радиуса R2 платформы 13 в сторону, противоположную действию центростремительного ускорения. Радиусы R2 акселерометров 12 (1ц, 2ц, 3ц) расположены под углами 120° и должны быть больше, нежели радиусы R1 с целью расширения диапазона угловых скоростей, измеряемых центростремительными акселерометрами. В качестве акселерометров 12, измеряющих центростремительные ускорения точек их крепления к платформе стенда, могут быть использованы прецизионные измерители линейных ускорений с широкой полосой пропускания и диапазоном измерения до 50 g, например - кварцевые маятниковые акселерометры с цифровым усилителем обратной связи [10, 12, 15, 16, 17]. В качестве акселерометров 11, измеряющих тангенциальные ускорения точек их крепления к платформе стенда могут быть использованы прецизионные измерители линейных ускорений с узкой полосой пропускания и небольшим диапазоном измерения, такие как кварцевый маятниковый акселерометр с диапазоном измерения до 10 g, полоса пропускания которого будет определена динамическими характеристиками его усилителя обратной связи [10, 12, 15, 16, 17] или поплавковый маятниковый акселерометр [19, 20], имеющий небольшую полосу пропускания и небольшой диапазон измерения согласно своим техническим характеристикам. На фиг. 1 в составе акселерометров 11 и 12 изображены 3 блока, соответственно: чувствительный элемент ЧЭ, охваченный отрицательной обратной связью, содержащей усилитель обратной связи УОС и фильтр Ф со значками τn и цn, где n - номер акселерометра (1, 2, 3), причем усилитель обратной связи и фильтр могут быть как аналоговыми, так и цифровыми, реализованными в процессоре в обратной связи в случае использования акселерометра с цифровым усилителем обратной связи [10, 12, 15, 16, 17].
В качестве первого измерителя угловой скорости 7, обозначенного на фиг. 1 как блок ИУС1 могут быть использованы прецизионные измерители угловой скорости, обладающие широким диапазоном измерения угловых скоростей - лазерный (ЛГ), волоконно-оптический (ВОГ), волновой твердотельный (ВТГ) гироскопы, а также измеритель угловой скорости на основе эффекта ядерного магнитного резонанса (ЯМГ), обладающие достаточно широкой полосой пропускания и высокими точностными характеристиками по случайной составляющей нулевого сигнала и погрешности масштабного коэффициента [22] (их чувствительные элементы обозначены на фиг. 1 как блок ЧЭ1), в обратную связь которых (на фиг. 1 - усилитель обратной связи УОС1) введен фильтр (на фиг. 1 обозначен как блок Ф1), обеспечивающий вырезание высокочастотных помех, возбуждаемых аэростатическим подвесом.
В качестве второго измерителя угловой скорости 8, обозначенного на фиг. 1 как блок ИУС2, может быть использован прецизионный измеритель угловой скорости, обладающий узким диапазоном измерения угловых скоростей - прецизионный поплавковый гироскопический датчик угловой скорости с газодинамической опорой ротора и магнитным центрированием его подвеса (ДУС с ГДО), обладающий достаточно узкой полосой пропускания и высокими точностными характеристиками по случайной составляющей нулевого сигнала и погрешности масштабного коэффициента [22, 23] (его чувствительный элемент обозначен на фиг. 1 как блок ЧЭ2), в обратную связь которого (на фиг. 1 - усилитель обратной связи УОС2) введен фильтр (на фиг. 1 обозначен как блок Ф2), обеспечивающий вырезание низкочастотных помех, возбуждаемых аэростатическим подвесом. Компенсационная обратная связь в ИУС1 и ИУС2 также может быть как аналоговой, так и цифровой.
ИУС 7, 8 закреплены на платформе 13 так, что их оси чувствительности параллельны оси вращения стенда (оси вала 1) (в случае использования всех перечисленных типов гироскопов), а вектор кинетического момента Н параллелен плоскости платформы 13 (в случае использования ДУС с ГДО). На оси вращения вала 1 закреплена подвижная часть двигателя постоянного тока ДП-ДБ 9, неподвижная часть которого размещена на корпусе стенда.
Система управления двигателем предлагаемого стенда, принцип ее работы подробно описан в [1, 5, 8, 9, 25, 28].
На оси вала 1 (фиг. 1) закреплен диск углового энкодера 5 [29], считывающие головки которого закреплены на корпусе стенда. На вале 1 закреплены: блок преобразования напряжения питания (БПНП) 22, вход которого через линии упругого торцевого токо-подвода 10 соединен с выходом стационарного источника питания, а выходы преобразователя напряжения 22 соединены с соответствующими входами блоков, закрепленных на вале.
В состав блоков преобразования информации БПИ1 и БПИ2, обозначенных на фиг. 1 позициями 18 и 19, соответственно, входят программируемая логическая интегральная схема (ПЛИС) и аналога - цифровой преобразователь (АЦП) стандартного вида, описанные в аналоге [13] и в прототипе [14] (на фиг. 1 не показаны). Вход шины БПИ1 18 соединен с выходом углового энкодера 5, а шина выхода - с входом управляющего процессора 16, в котором реализована цифровая система управления (ЦСУ) стендом, и с входом управляющего компьютера 15, в котором формируются алгоритмы управления стендом и формируется управляющее воздействие Uвх, пропорциональное задаваемой угловой скорости, поступающее в порт ввода - вывода управляющего процессора 16, в ядре которого формируется цифровая система управления стендом (фиг. 1).
Вход шины БПИ2 19 соединен с выходами измерителей угловой скорости 7 и 8 и выходами акселерометров 11 и 12, а выходы шины БПИ2 19 соединены с беспроводным передатчиком сигналов 20, который, в свою очередь, передает информацию в последовательном коде по беспроводному приемнику сигналов 21, соединенному шинами с управляющим процессором 16 и управляющим компьютером 15 (фиг. 1). В качестве беспроводных передатчика и приемника сигналов могут использоваться как инфракрасный и радиочастотный каналы, как это было описано в прототипе [14], так и системы LAN, Bluetooth и другие.
На корпусе стенда в виде плат закреплена электронная часть системы управления стендом - блок управления (БУ) (на фиг. 1 обозначен пунктирной линией как совокупность блоков).
В БУ входят:
- управляющий процессор 16, содержащий том числе порты ввода - вывода и ядро с дополнительной периферией;
- беспроводной приемник 21 и передатчик 20 сигналов;
-усилитель мощности (УМ) 17, вход которого соединен с выходом управляющего процессора 16 а выход - с обмотками ДП-ДБ 9.
- пульт подачи питания 14.
Закрепление на платформе стенда плат, реализующих перечисленные блоки, а также применение беспроводного передатчика 20 и приемника 21 сигналов для информационного обмена позволяют сократить число линий коллектора 10, необходимых для подвода питания к БПНП 22, что повышает точностные характеристики стенда.
Конструкция обеспечивает повышение точностных характеристик стенда, обусловленное:
- снижением момента трения от коллектора на оси вращения платформы, т.е. повышается стабильность задания угловой скорости;
- уменьшением длины линий электрических цепей от ИУС 7, 8 и акселерометров 11, 12 до электронного блока системы управления и уровня помех, поскольку не требуется передача маломощных сигналов через кольца коллектора;
- применением аэростатического подвеса 3 для снижения моментов трения по оси вращения 1 стенда;
- применения фильтров в обратных связях ИУС 7, 8 и акселерометров 11, 12 для вырезания низкочастотных и высокочастотных помех, возбуждаемых аэростатическим подвесом.
Конструкция обеспечивает расширение диапазона задаваемых угловых скоростей за счет четырех режимов работы стенда:
1 режим: от 0.001 до ω1 °/с, когда в качестве чувствительных элементов работают измеритель угловой скорости ИУС2 8, в качестве которого используется поплавковый ДУС с ГДО, три акселерометра 11, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, и угловой энкодер 5, причем верхний диапазон измерения<»i определяется диапазоном измерения угловой скорости ДУС с ГДО, который может колебаться в зависимости от конструкции и точностных характеристик прибора от 0,5 до 3 °/с;
2 режим: от ω1 до ω2 °/с , когда в качестве чувствительных элементов работают тройки акселерометров 11 и 12, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда, измеритель угловой скорости ИУС1 7, в качестве которого могут быть применены ЛГ, ВОГ, ЯМГ и ВТГ и угловой энкодер 5, причем диапазон ω2 определен верхним пределом измерения ИУС1 - в случае, если применяются ВОГ и ЛГ, то он определен верхним пределом измерения данного типа приборов, т.е. угловыми скоростями порядка 400-500 °/с , а когда применяются ВТГ в режиме интегрирующего гироскопа и ЯМГ, то - угловыми скоростями порядка 2500-3000 °/с, также определенными верхним пределом диапазонов измерения данных приборов.
3 режим: от ω2 °/с до 4000-5000 °/с, когда в качестве чувствительных элементов работают тройки акселерометров 11 и 12, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда, и угловой энкодер 5, причем верхний диапазон измерения определен диапазоном измерения прецизионного центростремительного акселерометра, который может достигать уровня 50-60 g при сохранении высоких точностных характеристик по масштабному коэффициенту и погрешности нулевого сигнала;
4 режим: от 4000-5000 °/с до 10000 °/с, когда в качестве чувствительных элементов работают тройка акселерометров 11, измеряющая тангенциальное ускорение точек крепления акселерометров к платформе стенда 13, и угловой энкодер 5.
Черырехдиапазонный режим работы позволяет с высокой точностью контролировать практически все типы измерителей угловых скоростей: прецизионные (в первом и втором режиме), средней точности (в первом, во втором и третьем режимах работы) и грубые, к которым относятся, например, микромеханические, роторные, стержневые гироскопы, работающие на больших диапазонах угловых скоростей (в третьем и четвертом режимах).
Кроме того возможен и пятый режим - режим калибровки стенда, когда измерители угловой скорости ИУС1 7 и ИУС2 8 работают поочередно в режиме «самоконтроля», как это описано в аналоге к настоящему патенту [13].
Стенд работает следующим образом. Управление режимами работы задает оператор от управляющего компьютера 15. Сигнал о смене режимов поступает с порта ввода -вывода управляющего компьютера 15 в порт ввода - вывода управляющего процессора 16.
В управляющем процессоре 16 реализован алгоритм переключения диапазонов работы стенда. В зависимости от задаваемой оператором команды управляющий компьютер 15 подает команду на выбор одного из пяти режимов работы стенда. Если выбран первый режим, то подаются команды на включение питания измерителя угловой скорости 7 и тангенциальных акселерометров 11. Угловой энкодер 5 и тангенциальные акселерометры 11 работают во всех четырех режимах работы стенда, кроме пятого, в котором работает угловой энкодер 5 и поочередно ИУС1 и ИУС2.
С порта ввода - вывода управляющего компьютера 15 в порт ввода - вывода управляющего процессора 16 поступает код, пропорциональный задаваемому управляющему напряжению Uвх., который передается в ядро процессора 16, где алгоритмически реализован сумматор сигналов, а оттуда - через ЦАП управляющего процессора 16 соответствующее этому коду напряжение через усилитель мощности (УМ) 17 поступает на датчик положения - двигатель бесконтактный (ДП-ДБ) 9. Двигатель ДП-ДБ 9 задает валу стенда 1 вращение с угловой скоростью, пропорциональной подаваемому управляющему напряжению Uвх. Работа двигателя 9 полностью идентична работе двигателя, описанной в прототипе [14].
Вал 1 стенда начинает вращение, и с инерциальных чувствительных элементов -измерителей угловой скорости 7 и 8 и измерителей кажущегося линейного ускорения 11 и 12 информационные сигналы поступают на шину БПИ2 19, а с нее - в блоки 20 и 21 - беспроводные приемник и передатчик сигналов, соответственно.
В первом режиме работы стенда, когда инерциальными чувствительными элементами являются ИУС2 8 и тангенциальные акселерометры 11, это сигналы, пропорциональные угловой скорости вращения вала 1 и тангенциальному ускорению точек крепления акселерометров 11 к платформе 13 стенда. В предлагаемом стенде, в отличие от прототипа, все инерциальные чувствительные элементы обладают собственными обратными связями с фильтрами, вырезающими помехи на соответствующих частотах, возбуждаемые аэростатическим подвесом. В процессоре 16 реализуются регуляторы контура управления двигателем 9. БПИ2 19 формирует кодовую комбинацию, поступающую в беспроводной передатчик сигналов 20, а оттуда данный сигнал поступает на приемник сигналов 21, с выхода которого, преобразованный в код, он поступает в порт ввода - вывода управляющего процессора 16. Беспроводной передатчик сигналов 20 и приемник этого сигнала 21 расположены таким образом, что сигнал передается и принимается в вертикальном направлении, параллельном валу 1 стенда. Приемник 21 может закрепляться на корпусе стенда, близко к его основанию, а передача сигнала в этом случае будет осуществляться с вращающейся платформы 13 в направлении сверху вниз. Требования к юстировке приемника 21 и передатчика 20 не предъявляются, так как в случае применения, например, инфракрасных передатчика и приемника угол захвата сигнала составляет не менее 120°, а в остальных случаях - вообще не ограничен. Из порта ввода - вывода управляющего процессора 16 код поступает в ядро процессора 16, где в виде алгоритма запрограммирован сумматор, в котором сравниваются кодовые комбинации сигналов с акселерометров 11 и измерителя угловой скорости 8 с заданным значением угловой скорости, поступившим в виде входного воздействия по стандартному интерфейсу через порт ввода - вывода управляющего процессора 16 от управляющего компьютера 15. С углового энкодера 5 последовательность импульсов, число которых пропорционально углу поворота платформы стенда через БПИ1 18, поступает в порт ввода-вывода управляющего процессора 16. В управляющем процессоре 16 происходит вычисление угловой скорости стенда как отношения измеренного угла ко времени опроса, измеряемого таймером процессора 16. Данное значение также поступает на вход алгоритмически реализованного сумматора и сравнивается со значениями кодовых комбинаций сигналов с измерителей угловой скорости 8, акселерометров 11 и входного задающего сигнала. Процессор 16 осуществляет синхронизацию данных сигналов по времени. По значениям поступивших на сумматор кодовых комбинаций формируется разностный управляющий сигнал, который поступает на вход цифрового регулятора системы управления двигателем, запрограммированного в виде алгоритма в управляющем процессоре 16 и обеспечивающего требуемые динамические характеристики системы управления двигателем ДП-ДБ 9 стенда. При этом преобразованный управляющий сигнал поступает на ЦАП управляющего процессора 16, откуда в виде аналогового сигнала - на усилитель мощности УМ 17, а оттуда - на двигатель ДП-ДБ 9. Таким образом, реализуется цифровая система управления через управляющий процессор 16, работающая по разностному принципу: при разностном управляющем сигнале, стремящемся к нулю, вал 1 стенда вращается с заданной угловой скоростью. При подаче с управляющего компьютера 15 гармонического или любого другого сигнала система работает аналогичным образом. Полученная информация через порт ввода - вывода управляющего процессора 16 через стандартный интерфейс поступает в порт ввода-вывода управляющего компьютера 15. От испытуемого прибора 4 через БПИ2 в порт ввода - вывода управляющего компьютера 15 поступает информация об угловой скорости, измеренной испытуемым прибором 4. В управляющем компьютере 15 происходит комплексная обработка полученных данных об угле и угловой скорости, заданной стендом, и выходной информации с испытуемого прибора 4, что позволяет формировать выходную информацию о масштабном коэффициенте и динамических характеристиках испытуемого прибора 4 (в случае подачи на вход системы управления стендом гармонического сигнала). Таким образом, осуществляется контроль измерителя угловой скорости 4.
Во втором режиме работы, когда инерциальными чувствительными элементами являются три тангенциальных 11 и три центростремительных 12 акселерометра, измеритель угловой скорости ИУС1 7, а также угловой энкодер 5. Разница заключается в том, что ИУС2 8 не участвует в процессе управления движением платформы стенда, а вместо него в работу включается ИУС1 7 и тройка центростремительных акселерометров 12. Система работает (аналогичным первому режиму образом) по разностному принципу.
В третьем режиме работы, когда задаваемые угловые скорости превышают диапазон измерения ИУС1 7, он отключается от системы управления стендом и остаются в работе только тангенциальные и центростремительные акселерометры 11 и 12, соответственно, и угловой энкодер 5, а работа системы управления осуществляется аналогично третьему режиму работы стенда.
В четвертом режиме работы, когда в системе управления стендом остаются в работе тангенциальные акселерометры 11 и угловой энкодер 5, управляющий сигнал, поступающий в порт ввода - вывода управляющего процессора 16 из порта ввода - вывода управляющего компьютера 15 и пропорциональный задаваемой угловой скорости стенда, сравнивается в сумматоре, реализованном алгоритмически в управляющем процессоре 15, с вычисленным сигналом, равным углу разворота, измеряемому угловым энкодером 5, деленному на время, измеряемое таймером управляющего процессора 15. Таким образом, в сумматоре управляющего процессора 16 сравниваются сигналы, пропорциональные измеренной и задаваемой угловым скоростям стенда.
В пятом режиме работы - режиме калибровки, осуществляемом при начале работы стенда, информация с акселерометров 11 и 12 и с испытуемого прибора 4 не поступает через блок БПИ2 в систему управления стендом. Работают по очереди попарно угловой энкодер 5 и ИУС1 7, а после отключения ИУС1 - угловой энкодер 5 и ИУС2 8. Измерители угловой скорости находятся в режиме «самоконтроля», как это описано в аналоге [13] к настоящему патенту. Сигналы в цепи обратной связи стенда формируются аналогично первым четырем режимам. В пятом режиме работы достигаются две цели:
1. измеряются составляющие вибраций, возбуждаемых аэростатическим подвесом, измерителями угловой скорости ИУС1 7 и ИУС2 8, что дает возможность настроить фильтры в цепи обратной связи для вырезания, соответственно, низкочастотных и высокочастотных помех для обеспечения работы прецизионного стенда;
2. производится калибровка измерителей угловой скорости 7 и 8, которые будут являться эталоном для испытуемого прибора 4.
Литература.
1. Ахмеджанов А.А. Системы передачи угла повышенной точности. - М.-Л.: «Энергия», 1966.
2. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975.-767 с.
3. Бессекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 351 с.
4. Бычков С.И., Лукьянов Д.П., Бакаляр А.И. Лазерный гироскоп - М.: Сов. радио, 1975. - 421 с.
5. Высокоточные преобразователи угловых перемещений / Под ред. А.А. Ахметжанова - М.: Энергоатомиздат, 1986.
6. Журавлев В.Ф., Климов Д.М. Волновой твердотельный гироскоп - М.: Наука, 1985. - 126 с.
7. Изерман Р. Цифровые системы управления: Пер. с англ. - М.: Мир, 1984. - 541 с.
8. Калихман Д.М. Прецизионные управляемые стенды для динамических испытаний гироскопических приборов / Под ред. акад. В.Г. Пешехонова - СПб. ГНЦ РФ ЦНИИ «Электроприбор», 2008. - 304 с. ISBN 5-900780-82-5.
9. Калихман Д.М., Садомцев Ю.В., Депутатова Е.А., Никифоров В.М. Прецизионные поворотные стенды нового поколения с инерциальными чувствительными элементами и цифровым управлением // Известия РАН. Теория и системы управления, №2, 2014. С. 130-146.
10. Калихман Д.М., Калихман Л.Я., Гребенников В.И., Депутатова Е.А., Скоробогатов B.В. Маятниковый акселерометр с цифровым управлением и новыми функциональными возможностями. // Известия РАН. Теория и системы управления, №2, 2021. C. 73-95.
11. Калихман Д.М., Калихман Л.Я., Депутатова Е.А., Крайнов А.П., Янковский А.А., Кривцов Е.П., Ермаков Р.В. Пути расширения диапазона измерения и повышения точностных характеристик поворотных стендов с инерциальными чувствительными элементами для контроля гироскопических приборов // 25 Санкт-Петербургская Международная конференция по интегрированным навигационным системам. СПб.: Изд-во ЦНИИ «Электроприбор», 2018. С. 334-339.
12. Калихман Д.М., Калихман Л.Я., Депутатова Е.А., Скоробогатов В.В., Николаенко А.Ю., Нахов С.Ф. Опыт проектирования и изготовления блоков измерителей линейного ускорения на кварцевых маятниковых акселерометрах с аналоговой и цифровой системами управления. Монография. - Саратов: Изд-во СГТУ им. Гагарина Ю.А., 2021, 240 с. ISBN - 978-5-7433-3456-8.
13. Патент 2403538 РФ. Приоритет от 22.05.2009. Универсальный стенд для контроля прецизионных гироскопических измерителей угловой скорости / Калихман Д.М., Калихман Л.Я., Садомцев Ю.В., Полушкин А.В., Ермаков Р.В., Депутатова Е.А., Нахов С.Ф., Молчанов А.В., Чиркин М.В., Измайлов Е.А. Зарегистрирован в Государственном реестре патентов Российской Федерации 10 ноября 2010 г. // Б.И. №31, 2010.
14. Патент 2494345 РФ. Заявка №2012101374, приоритет от 16.01.2012. Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости / Калихман Д.М., Калихман Л.Я., Садомцев Ю.В., Полушкин А.В., Депутатова Е.А., Нахов С.Ф., Никифоров В.М., Сапожников А.И., Межирицкий Е.Л. Зарегистрирован в Государственном реестре изобретений РФ 27.09.2013. // Б.И. 2013.
15. Патент 2615221 РФ от 04.04.2017. Заявка №2015116808. Приоритет от 30.04.2015. Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр / Калихман Д.М., Калихман Л.Я., Гребенников В.И., Скоробогатов В.В., Нахов С.Ф., Смирнов Е.С.// Б.И. №10, 2017.
16. Патент 2627970 РФ от 14.08.2017. Заявка №2016144606. Приоритет от 14.11.16. Способ обеспечения линейности масштабного коэффициента маятникового широко диапазонного акселерометра компенсационного типа / Калихман Д.М., Калихман Л.Я., Гребенников В.И., Скоробогатов В.В., Нахов С.Ф. // Б.И. №23, 2017.
17. Патент 2626071 РФ от 21.07.2017 г. Заявка №2016122097. Приоритет от 03.06.16. Способ обеспечения линейности масштабного коэффициента маятникового акселерометра компенсационного типа / Калихман Д.М., Калихман Л.Я., Гребенников В.И., Скоробогатов В.В., Нахов С.Ф., Кожевников В.Е., Самитов P.M. // Б.И. №21, 2017.
18. Патрюэль И. Бесплатформенная инерциальная навигационная система на основе ВОГ с уходом одна морская миля в месяц: мечта уже достижима? / И. Онтас, Э. Лефевр, Ф. Наполитано // Гироскопия и навигация. - 2013. - №3. - С. 3-13.
19. Пельпор Д.С. Гироскопические системы. В 3 т.М.: Высшая школа, 1986.
20. Пельпор Д.С, Михалев И.А., Бауман В.А. Гироскопические приборы и системы. М.: Высшая школа, 1988. 424 с.
21. Пешехонов В.Г. Гироскоп на основе явления ядерного магнитного резонанса: прошлое, настоящее, будущее /, Ю.А. Литманович, А.К. Вершовский // Материалы 7 российской мультиконференции по проблемам управления. - СПб: Изд-во «ЦНИИ «Электроприбор»», 2014. - С. 35-42.
22. Ривкин Б.С Аналитический обзор состояния исследований и разработок в области навигации за рубежом. Выпуски 1-4. СПб.: Изд-во ЦНИИ «Электроприбор», 2017-2019.
23. Решетников В.И. Гироскопические чувствительные элементы для систем управления ориентацией и стабилизации орбитальных космических аппаратов. / Доронин В.П. [и др.] // 8 Санкт - Петербургская международная конференция по интегрированным навигационным системам. - СПб.: Изд. - во ЦНИИ "Электроприбор", 2001. - С. 17-30.
24. Решетников В.И. Опыт создания высокоточных поплавковых гироприборов, применяемых в системах угловой ориентации и стабилизации космических аппаратов и станций. / Волынцев А.А. [и др.] //10 Санкт - Петербургская международная конференция по интегрированным навигационным системам. - СПб.: Изд. - во ЦНИИ "Электроприбор", 2003. - С. 226-234.
25. Хрущев В.В. Электрические машины систем автоматики. - Л.: «Энергоиздат», 1985. -с. 4-11, с. 324.
26. Шейнберг С.А., Жедь В.П., Шишеев М.Д. Опоры скольжения с газовой смазкой. -М.: Машиностроение, 1969 - 336 с.
27. Шереметьев А.Г. Волоконный оптический гироскоп.- М.: Радио и связь, 1987. - 152 с.
28. Юферов Ф.М. Электрические машины автоматических устройств. - М.: «Высшая школа», 1976 - с. 302.
29. Технические характеристики угловых энкодеров фирмы Renishaw: [сайт]. URL: www.renishaw.ru/ru/enclosed-optical-encoders--425273 (дата обращения: 06.12.2021).
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
Изобретение относится к области измерительной техники и может быть использовано для испытаний гироскопических измерителей угловых скоростей различного класса и принципа действия для аттестации по их статическим и динамическим характеристикам путем задания угловых скоростей как постоянных по величине, так и изменяющихся по произвольному закону. Заявлен универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости, где в качестве инерциальных измерителей используются два измерителя угловой скорости и две тройки измерителей линейного ускорения (акселерометров), измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда, оси чувствительности каждой тройки акселерометров расположены под углами 120 градусов друг относительно друга. В качестве первого измерителя угловой скорости используется прецизионный измеритель угловой скорости, обладающий широким диапазоном измерения угловых скоростей с достаточно широкой полосой пропускания, в обратную связь которого введен фильтр, обеспечивающий вырезание высокочастотных помех, возбуждаемых аэростатическим подвесом, а в качестве второго измерителя угловой скорости используется прецизионный поплавковый гироскопический измеритель угловой скорости с газодинамической опорой ротора и магнитным центрированием его подвеса, обладающий узким диапазоном измерения угловых скоростей и достаточно узкой полосой пропускания, в обратную связь которого введен фильтр, обеспечивающий вырезание низкочастотных помех, возбуждаемых аэростатическим подвесом, оба измерителя угловой скорости выполнены с возможностью работы как инерциальными чувствительными элементами стенда, так и с возможностью нахождения в режиме «самоконтроля». Технический результат – повышение стабильности задаваемой угловой скорости, а также расширение диапазона измеряемых угловых скоростей и улучшение точностных характеристик стенда. 2 з.п. ф-лы, 1 ил.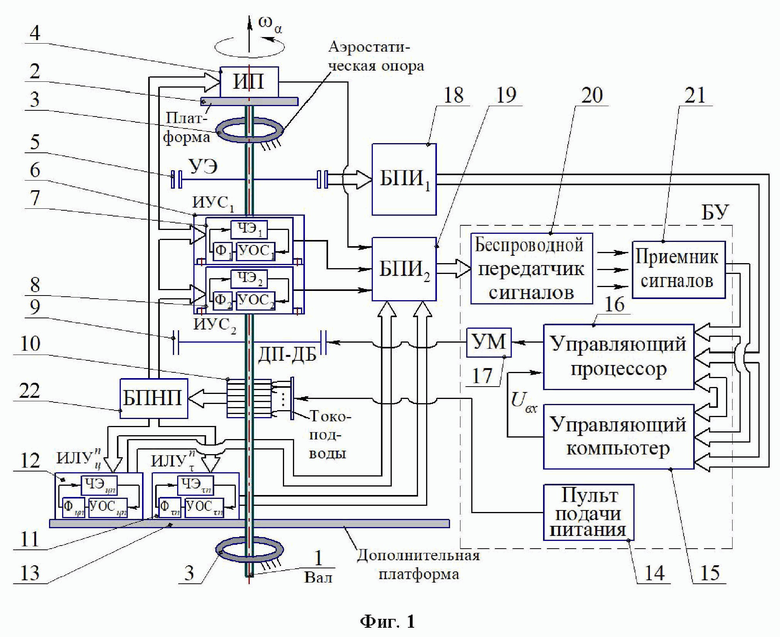
1. Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель и два усилителя мощности, дополнительную платформу, закрепленную на валу, шесть акселерометров линейных ускорений, три из которых измеряют тангенциальное, а три - центростремительное ускорения точек их крепления к платформе стенда, оси чувствительности которых расположены под углами 120° друг относительно друга для каждой тройки акселерометров, причем каждый из акселерометров имеет датчик угла, датчик момента и усилитель обратной связи, представляющий собой аналоговое или цифровое устройство, а выходная информация каждого акселерометра представляет собой аналоговый или цифровой сигнал; измерительный гироскопический датчик угловой скорости с сервисной электроникой, ось чувствительности которого совмещена с осью вращения вала, а сервисная электроника обеспечивает его работу в режиме измерителя угловой скорости; управляющий процессор, содержащий в том числе порты ввода-вывода и ядро с дополнительной периферией, аналого-цифровой и цифроаналоговые преобразователи, выполненные встроенными в процессор или являющиеся внешними устройствами по отношению к процессору; систему обратной связи стенда, в которой корректирующий контур и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре; микроконтроллер, содержащий интерфейс, обеспечивающий передачу информации в последовательном коде по инфракрасному или радиочастотному каналу, причем направление передачи информационного сигнала коллинеарно оси вращения стенда и направлено сверху вниз; приемник инфракрасного или радиочастотного сигналов, закрепленный неподвижно на основании стенда рядом с управляющим процессором в основании стенда, причем направление приема сигнала также коллинеарно оси вращения стенда и направлено снизу вверх, при этом вход преобразователя напряжения питания через линии упругого торцевого токоподвода и контакты коллектора соединен с выходом стационарного источника питания, а выходы преобразователя напряжения соединены с соответствующими входами блоков, закрепленных на вале; управляющий компьютер, находящийся в режиме обмена через стандартный интерфейс с портом ввода-вывода управляющего процессора; угловой энкодер, содержащий диск и две считывающие оптические головки, которые через преобразователь сигнала соединены с портом ввода-вывода управляющего процессора, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления диска углового энкодера на выходную информацию об угловом положении платформы стенда, отличающийся тем, что в систему управления стендом введен второй прецизионный измеритель угловой скорости, а в системы управления датчиков угловой скорости и акселерометров введены фильтры, полоса пропускания которых обеспечивает вырезание высокочастотных и низкочастотных колебаний, в том числе повышенной амплитуды на резонансных частотах, возбуждаемых при работе аэростатического подвеса.
2. Стенд по п. 1, отличающийся тем, что в качестве первого измерителя угловой скорости использован прецизионный измеритель угловой скорости, обладающий широким диапазоном измерения угловых скоростей с достаточно широкой полосой пропускания, в обратную связь которого введен фильтр, обеспечивающий вырезание высокочастотных помех, возбуждаемых аэростатическим подвесом, а в качестве второго измерителя угловой скорости используется прецизионный поплавковый гироскопический измеритель угловой скорости с газодинамической опорой ротора и магнитным центрированием его подвеса, обладающий узким диапазоном измерения угловых скоростей и достаточно узкой полосой пропускания, в обратную связь которого введен фильтр, обеспечивающий вырезание низкочастотных помех, возбуждаемых аэростатическим подвесом, причем оба измерителя угловой скорости выполнены с возможностью работы как инерциальными чувствительными элементами стенда, так и с возможностью нахождения в режиме «самоконтроля».
3. Стенд по п. 1 или 2, отличающийся тем, что в качестве прецизионного измерителя линейных ускорений, измеряющего тангенциальное ускорение точек их крепления к платформе стенда, использован прецизионный измеритель линейных ускорений, обладающий узкой полосой пропускания и небольшим диапазоном измерения ускорений для измерения и компенсации колебаний платформы от вредных моментов по оси вращения, а в качестве прецизионного измерителя линейных ускорений, измеряющего центростремительное ускорение точек их крепления к платформе стенда, использован прецизионный измеритель линейных ускорений, обладающий широкой полосой пропускания и большим диапазоном измерения ускорений для измерения центростремительного ускорения, в усилители обратной связи измерителей тангенциального ускорения введены фильтры, вырезающие низкочастотные помехи, возбуждаемые аэростатическим подвесом, а в усилители обратной связи измерителей центростремительных ускорений введены фильтры, вырезающие высокочастотные помехи, возбуждаемые аэростатическим подвесом.
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ | 2000 |
|
RU2162230C1 |
| US 9857198 B2, 02.01.2018. | |||
