текущего значения целевой функции, выход которого соединен с третьим неподвижным контактом третьего реле времени блока, управления, третий подвижный контакт которого подключе к входу блока запоминания оптимального значения целевой функции, выход которого соединен с первым под™ вижным контактом в.торого реле времени блока управления, первый неподвижный контакт которого соединен с первым входом первой схемы сравнения, второй вход которой подключен к второму неподвижному контакту второго реле времени блока управления, подвижный контакт которого соединен с выходом блока запоминания текущего значения целевой функции, первый выход блока запоминания значения правой границы интервала неопределенности параметра поиска подключен к первому входу первого сумматора, а второй выход блока запоминания значения правой границы интервала неопределенности параметра поиска соединен с первым входом второго сумматора, выход блока запоминания оптимального значения параметра поиска подключен к первому входу второй схемы сравнения и к четвертому подвижному кон такту третьего реле времени блока управления, неподвижный контакт которого подключен к входу первого инвертора, выход которого соединен с Бторыгл и входом второго сумматора, пятый неподвижный контакт третьего реле времени блока управления подключен к первому подвижном контакту второго дополнительного реле времени, первый неподвижный контакткоторого соединен с первым информационным входом блока запоминания значения правой границы интервала неопределенности параметра поиска, второй информационный вход которого является первым входом задания начальных условий, второй неподвижный контакт второго дополнительного реле времени подключен
к первому информационному входу блока запоминания значения левой границы интервала неопределенности параметра поиска, второй информационный вход которого является втррым входом блока задания начальных условий оптимизатора, вьлход которого подключен к входу второго инвертора и третьему входу второго сумматора, выход которого через третий замыкающий контакт второго реле времени блока управления подключен к входу блока запоминания текущего значения параметра поиска, выход которого является выходом оптимизатора и подключен к второму входу второй схемы сравнения, пятому подвижному контакту третьего реле времени блока управления и третьему подвижному контакту четвертого реле времени блока управления, пятый неподвижный контакт третьего реле времени блока управления соединен с первым информационным входом блока запо1 шнания оптимального значения параметра поиска, второй информационный вход которого является третьим В55&ДОМ задания начальных условий оптимизатора, третий неподвижный контакт четвертого реле времени подключен к второму подвижному контакту второго дополнительного реле времени, третий неподвижный контакт второго дополнительного реле времени подключен к первому информационному входу блока запоминания значения правой границы интервала .неопределенности параметра поиска, четвертый неподвижный Контакт второго дополнительного реле времени подключен к первому информационному входу блока запоминания значения левой границы интервала неопределенности параметра поиска, выход первого сумматора подключен- к первому подвижноMj контакту первого переключателя блока управления, -второй вход которого соединен с выходом источника постоянного напряжения о
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Многоканальный статистический оптимизатор | 1982 |
|
SU1076872A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Двухканальный шаговый оптимизатор | 1985 |
|
SU1343391A1 |
| Регулятор с релейной характеристикой | 1988 |
|
SU1585778A2 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Регулятор с релейной характеристикой | 1986 |
|
SU1432456A2 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Индукционная нагревательная установка | 1980 |
|
SU974606A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
Изобретение относится к техничес кому моделированию и может быть использовано ca лэcтoятeльнo или в устройствах управления процессами различной физической природы, протекающими в системах с целью авто1«атического поиска экстремугла унимодальной целевой функции, харак ери зующей исследуемую систему.В общем случае поиск экстремума унимодальной целевой функции формулируется в виде задачи математического программирования. 5 Известно устройство для решения (задачи оптимального распределения ресурсов, содержащее блоки интеграторов, блоки функциональных преобразователей для определения градиента оптимизируемэй функции, блоки сумматоров и блоки запоминания, предназначенное для решения различных классов задач математического программирования 1 .
Недостатком данного способа является то, что устройство, использующее градиентные методы поиска, не позволяет определить экстремум только в результате большого числа экспериментов на каждом шаге.
Наиболее близким к предлагаемому является устройство для моделирования процессов поиска, содержащее первый интегратор, выход которого соединен с входом первого сумматора, в цепи обратной связи которого включены параллельно первый блок ограничения и первый инвертор, второй интегратор, выход к торого соединен с входом второго сумматора, в цепи обратной связи которого включен второй блок ограничения, а выход второго сумматора через второй инвертор соединен с вдом второго интегратора, входы 1блока умножения подключены соответственно к выходу второго инвертора И через первый управляемый ключ - к первому входу устройства, а выход соединен с входом второго сумматора, выход второго инвертора соединен с входом первого сумматора, а выход первого инвертора: чере второй управляемый ключ соединен с входом первого интегратора, управляющие входы ключей соединены с соответствующими входами устройства 2 ,
Недостатком известного устройства является-длительность поиска экстремума, так как поиск производится по всему диапазону изменения параметра.
Цель изобретения - повышение быстродействия устройства.
Указанная цель достигается тем, что в однопараметрический аналоговый оптимизатор, содержащий пе.рый и второй сумматоры, первый и
I ВТОрой инверторы, причем выход второго инвертора подключен к первому вгюду первого сумматора, введены блоки запоминания значений правой и левой границ интервала неопределности параметра поиска, блоки запоминания оптимального и текущего значений целевой функции, первую |И вторую схемы сравнения, первое и второе дополнительные реле времени и блок управления, включающий перв и второй переключатели, четыре рел времени и схему сравнения, причем первым входом блока управления явлется первый подвижный контакт первого переключателя, второй подвижный контакт первого переключателя подключен к первому входу схемы
сравнения блока управления, выход которой подключен к одному выводу обмотки первого реле времени, другой выход которой подключен к шине нулевого потенциала, третий подвижный контакт первого переключателя подключен к положительному выводу источника питания, .первый неподвижный контакт первого переключателя подключен к второму входу сравнения блока управления, второй
0 неподвижный контакт первого переключателя является вторым входом блока управления, третий неподвижный контакт первого переключателя соединен с подвижным контактом пер5вого реле времени блока управления, неподвижный контакт которого подключен к одному выводу обмотки второго реле времени блока управления, третий неподвижный контакт
0 первого переключателя блока управления подключен к первому подвижному контакту третьего реле времени блока управления, к первому и второму подвижным контактам первого
5 дополнительного реле и первому подвижному контакту четвертого реЯе времени блока управления, первый неподвижный контакт которого соеди7 нен с первым и вторьм неподвижными
0 контактами второго переключателя блока управления и с вторым подвижным контактом третьего реле времени блока управления,- неподвижный контакт которого соединен с одним
5 выводом обмотки четвертого реле времени блока управления, первый неподвижный контакт третьего реле времени блока управления подключен к .к третьему и четвертому неподвижным контактам второго переключате0ля блока управления и второму подвижному контакту четвертого реле времени блока управления, второй неподвижный контакт которого соединен с одним выводом обмотки третье5го реле времени блока управления, первый и второй неподвижные кднтакты первого дополнительного реле подключены соответственно к первому и второму подвижным контактам
0 второго переключателя блока управ;Ления, другие выводы обмоток второго, третьего и четвертого реле времени блока управления соединены ;С отрицательным выводом источника
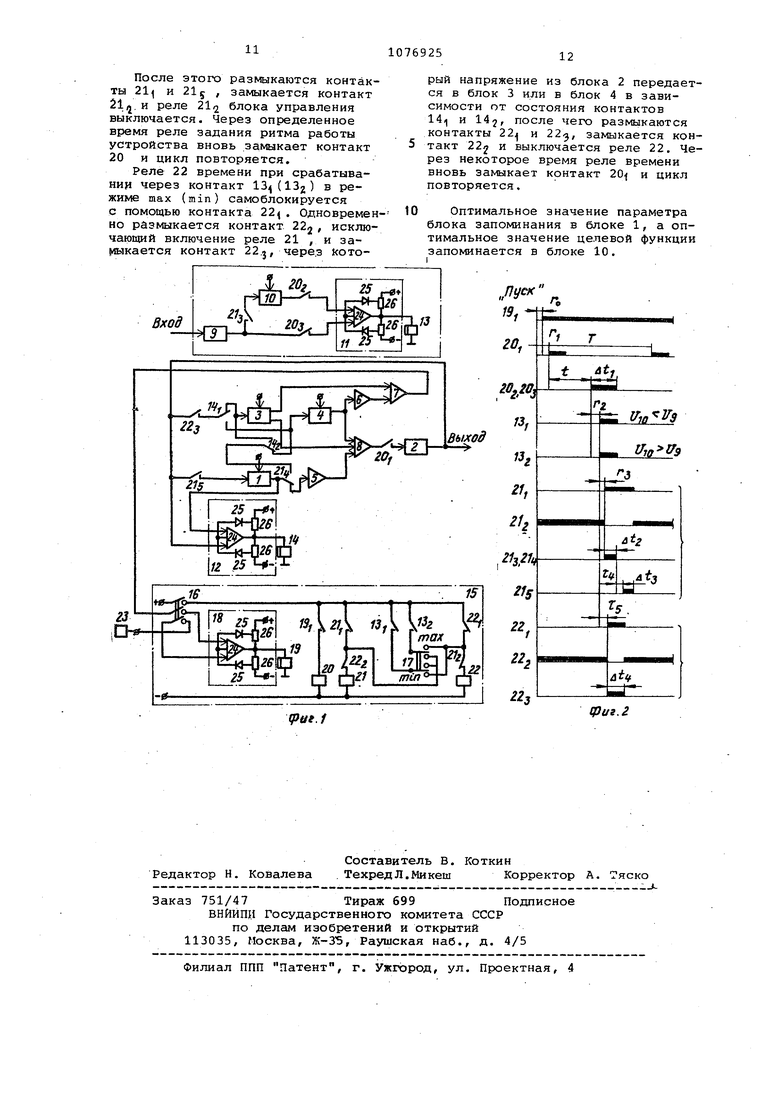
5 iпитания, вход оптимизатора подключен к входу блока запоминания текущего значения целевой функции, выход которого соединен с третьим Неподвижным «онтактом третьего ре0ле времени блока управления, третий подвижный контакт которого подключен к входу блока запоминания лучшего значения целевой функции, вы-. ;ход которого соединен с первым подвижным контактом второго реле вре- ; мени блока управления, первый неподвижный контакт которого соеди.нен с первым входом первой схемы сравнения, второй вход которой под ключен к второму неподвижному контакту второго реле времени блока управления, подвижный, контакт кото рого соединен с выходом блока запоминания текущего значения целевой функции, первый выход блока запоминания значения правой границы интервала неопределенности пара метра поиска подключен к первому входу первого сумматора, а второй выход блока запоминания значения правой границы интервала неопределенности параметра поиска соединен С первым входом второго сумматора, выход блока запоминания оптимального значения параметра поиска под ключен к nepBOfJiy входу второй схемы сравнения и к четвертому подвиж ному контакту третьего реле времени блока управления, неподвижный контакт которого подключен к входу первого инвертора, выход которо го соединен с вторым входом второго сумматора, пятый неподвижный контакт третьего реле времени блока управления подключен к первому подвижному контакту второго дополнительного; реле времени, первый не подвижный контакт которого соедине .с первым информационным входом бло ка запоминания значения правой гра ййцы интервала неопределенности па раметра поиска, второй информацион ный вход которого является первым входом задания начальных условий, второй неподвижный контакт второго дополнительного реле времени подключен к первому информационному входу блока запоминания значений левой границы интервала неопределен ности параметра поиска, зторой информационный вход которого- является вторым входом задания начальных условий оптимизатора, выход котоЁюгооподключен к входу второго инвертора и третьему входу второго сумматора, выход которого через третий замыкающий контакт второго реле времени блока управления подключен к входу блока запоминания текущего значения параметра поиска, выход ко .торого является выходом-оптимйза-, тора, и подключен к второму входу второй схемы сравнения, пятому подвилшому контакту третьего реле времени блока управления и третьему подвижному контакту четвертого реле времени блока управления, пятый неподвижный конта.кт третьего реле в времени блока управления соединен с первым информационным входом блока запоми нания оптимального значения параметра поиска, второй информационный вход которого является третьим входом начальных.условий оптимизатора, третий неподвижный контакт четвертохх) реле времени подключен к второму подвижному контакту второго дополнительного реле времени, третий неподвижный контакт второго дополнительного реле времени подключен к первому информационному входу блока запоминания значения правой границы интервала цеопредоленности параметра поиска, . четвертый неподвижный контакт второго дополнительного реле времени подключен к первому информационному входу блока запоминания левой границы интервала неопределенности параметра поиска, выход первого сумматора подключен к первому входу подвижного контакта первого переключателя блока управления, второй вход которого соединен с выходом источника постоянного напряжения. На фиг. 1 представлена блок схема однопараметрического аналогового оптимизатора} на фиг, 2 - диаграммы его работы. Оптимизатор содержит блоки 1 и 2 запоминания оптимального и текущего значения параметра поиска cooTjeTCTвенно, блоки 3 и 4 запоминания правой и левой границ интервала неопределенности соответственно, первый и второй инверторы 5 и б соответственно, первый 7 и второй сумматоры 8, блоки,9 и 10 запоминания текущего оптимального значений целевой функции, первую и вторую схемы 11 и 12 сравнения соответственно, первое и второе дополнительные реле 13 и 14 времени соответственно и блок 15 управления. Блок 15 управления включает первый 16 и второй 17 переключатели, схему 18 сравнения, первое 19, второе 20, третье 21 и четвертое 22 -реле времени, источНИ.К 23 постоянного напряжения. Схемы сравнения включают операционные усилители 24, диоды 25 и потенциометры 26. Кроме того, оптимизатор содержит контакты 13 и 132; 14i и , Hi и 192/.20 и 202,и 20,, 21, л 21, 21, и 21у, 22 , 22г и 22,. Число экспериментов или время для определения экстремума бывает часто ограничено. Для сокращения времени поиска экстремума можно использовать однопараметрические методы поиска экстремума унимодальных функций (метод Фибоначчи золотое сечение или поиск по дискретным точкам). . Указанные методы по результатам двух экспериментов определяют на каждом- k -ом шаге поиска координаты крайних точек х левой и xf правой нового интервала неопределенHocvH, в котором возможен экстремум целевой функции и в выборе точек xj : х, лежащих внутри получе ного интервала. При этом поиск экс ремума функции будет наилучшим, если одна из точек (х|| или х ) соо ветствует наилучшему из ранее проведенных экспериментов (лучшее зна чение параметра поиска), а вторая располагается внутри найденного ин тервала (xj, X ) симметрично первой. На первом шаге поиска экстремума необходимо провести два эксперимента в точках х и х, Точка х( для метода Фибоначчи определяется по формуле xj х - (х - xjFy.,j/F. где величина FK - ближайшее, большее к (xfj - х)/й число Фибоначчи, Ь - требуемая точность вычисле Точка х,/К 1,2..... (в соотвётствии с принципом симметричног расположения точек относительно середины полученного интервала не определенности находится для лйбо ;го из рассмотренных методов с пом щью выражения xi; х + х - х| На последующих шагах стратегия сиидалетрично расположения точки оч редного эксперимента относительно наилучшего из предыдущих может бы реализована независимо от выбранного метода поиска по рекуррентной схеме определения нового интервала неопределенности (xJ, Хр) и выбора координат точек xlj и х§ ,(). Для задачи на минит- м: если f(xV), то xJ ,1 - fc4 Xj , Xj Xf, X n если f(xr ) f(xV). TO „ „«-1 s- ..K-t K I ..KH 5 1- , ;, 2 ( Xp Xf + X - X . Для задачи на максиг 1ум: если f(x,) f(xV,), то xJ x X - v) - v -V V -l-vK f Г 2 f t n - xJ ; если f )x,-) f(xV), TO „li ..K-i V „KM K ,,ti-t Лд A, /Л(- 2 -„ -„Ho-v -v x -x -t-Xf, X , Реализаи;ия данной рекуррентной схемы поиска возможна после прове дения двух экспериментов, которые должны быть проведены заранее независимо друг от друга на первом ,шаге, вследствие чего первый шаг не является однотипным с последую щими . С целью полной автоматизаци процесса поиска экстремума целесо ( образно считать, что до проведения первого реального эксперимента проведено, ряд фиктивных экспериментов, в результате которых определены координаты левой х Хд и правой X :, + Xj - Хд границ интервала неопределе 1ности, а лучшее значение целевой функции соответствует точке х° X;, . Число Xj определяется по формуле (1). С учетом этого по правилу симметричного размещения точек очередного эксперимента первый реальный эксперимент необходимо проводить в ,0 „/ точке X После проведения первого реального эксперимента по правилам 1б или 2а рекуррентной схемы находим: новый интервал н«5определенности (х;, хО х , х;, хг к„-}, который соответствует исходному интервалу, точку лучшего из проведенных экспериментов х х°, которая соответствует точке первого реального эксперимента, и точку второго реального эксперимента х X/ - Хл т Xj Х м Таким образом, в результате предварительного задания границ фиктивного интервала неопределенности |х° Х и Хц Х| + Х - Х и фИКтивной точки наилучшего эксперимента х Xq при реализации рассмотренного метода Фибоначчи поиска экстремуму выполнение каждого шага осуществляется по одной и той же рекуррентной схеме. Однопараметрический аналоговый оптимизатор работает следующим образом. Второй инвертор 6 и первый сумматор 7 формируют сигнал, пропорциональный интервалу неопределенности ( - Хд ) , а первый инвертор 5 и второй сумматор 8 формируют сигнал, пропорциональный текущему значению параметра поиска. Схема 11 сравнения совместно с первым дополнительным реле 13 времени служат для включения реле 21 и 22 времени блока 15 управления. Если значение напряжения в блоке 10 мень;ше значения напряжения в блоке 9, то замыкается первый контакт первого дополнительного реле 13 време:ни. В противном случае - второй контакт первого дополнительного реле 13 времени. Вторая схема 12 сравнения и второе дополнительное реле 14 времени предназначены для определения оптимального значения параметра поиска из двух значений - те;кущего и наилучшего на предыдущих шагах. Если напряжение на блоке 2 меньше напряжения с блока 1, то п§реключаются первые и вторые контакты второго дополнительного реле 14 времени.В противноЦ лучае контакты возвращаются в исходное положение. Блок 15 управленля коммутирует цепи устройства в соответствии с заданным режимом работы и управляе работой основных элементов устройс ва. Схема 18 сравнения блока 15 уп равления включает устройство, а при достижении точности поиска экстремума выключает его. Первый переключатель 16 служит для включения устройства. Реле 20 блока управления времени задает ри работы устройства. Реле 21 и,22 вр мени предназначены для коммутации цепей формирования границ интервал неопределенности. Второй переключатель 17 служит для задания режима поиска максимума (max) и миним ма (min) целевой функции, Дпя ввода исходных данных и выбо ра режима работы предлагаемого устройства необходимо выбрать и с помощью переключателя задать режим работы устройства, установить в бло ке 1 величину, соответствующую х,, в блоке 3 величину, соответствующую х, в блоке 4 величину, соответст.вующую Хд, в блок 10 максимально возможное значение напряжения (задача на минимум) или минимально воз можное значение напряжения (задача на максимум), а также подать на второй вход блока 24 управления нап ряжение, соответствующее требуемой точности поиска экстремума Цд. В результате на выходе первого сумматора 7 формируется напряжение пропорциональное величине фиктивного интервала неопределенности (х х° ), а на выходе сумматора 8-0 напряжение, пропорциональное значению параметра поиска в точке первого эксперимента х° х° + х°- х После включения переключателя 16 схема 18 сравнения запускает реле 19 времени и устройство начинает, работать в соответствии с диафрагмой (фиг. 2) в автоматическом режиме .поиска .экстремума до тех пор, пока не разомкнется контакт 19,; (контакт 19| разомкнется, если достигается требуемая точность- вы числений, т.е, напряжение, соответствующее U будет больше или , aв .но напряжению, соответствующему ti- Такт работы устройства задает реле 2С времени В течение каждого такта за один эксперимент производится анализ результата (уточнение границ интервала неопределенности) определяется точка значения параметра очередного эксперимента. Длительность такта Т (диаграмма фиг. 2) выбирается с учетом времени, необходимого на проведение одного эксперимента с исследуемой системой и автоматическую обработку полученного результата. Начало каждого такта происходит в момент замыкания контакта 20 (. By течение каждого такта устройство работает следующим образом. При замыкании контакта 20 в блок 2 передается значение напряжения, соответствующее точке очередного эксперимента, которое поступает на вход исследуемой системы и на второй схеме 12. сравнения. Схема 12 сравнения совместно со вторым дополнительным реле времени в зависимости от соотношения напряжений на ее входах с помощью контактов 14 и 14, коммутируют соответствующие цепи. Длительность замкнутого состояния контакта 20i должна быть достаточной для передачи напряжения из сумматора 8 в блок 2, Контакт 20 размыкается, С выхода системы напряжение, пропорциональное значению целевой функции, поступает на вход устройства (в блок 9). По истечении времени t (продолжительность переходных процессов в системе) реле 20 замыкает контакты 20 и 20з. С. этого момента в устройство начинается обработка рёзультатов эксперимента. В первой схеме 11 сравнения сравниваются значения функции, соответствующие параметру поиска оптималь ного и последнего из проведенных экспериментов. В результате схема 11 сравнения переходит в возбужденное состояние второго дополнительного реле 13 ( или 13-2 времени в зависимости от результата эксперимента. В зависимости от выбранного режима работы включается реле 21 и 22 времени. Реле 21 времени при включении через контакты 13 и 132 в Режиме max (mih) самоблокируется с помощью контакта 21. Одновременно размыка- . ется контакт 21,исключающий включение 22, замыкается контакт 21 и напряжение из блока 9 передается в блок 10, переключается контакт 21 „ через который напряжение из блока 1,. соответствующее наилучшему из ngor ведённых экспериментов передается, или в блок 3 (корректируется правая граница интервала неопределенности), или в блок 4 (корректируется левая граница интервала неопределенности) в зависимости от Состояния контактов 14 и 14. Реле 20 времени разг/икает контакты 20 и 20 и переводит схему 11 сравнения в не- : возбужденное состояние,; Контакт 13 или 13, который был замкнут, размыкается. После размыкания контактов 215 и 21 замыкается контакт 215 и напряжение из блока 2 передается в блок 1, После этого размыкаются контак ты 21 и 21 , замыкается контакт 21.и реле 21 блока управления выключается. Через определенное время реле задания ритма работы устройства вновь .замыкает контакт 20 и цикл повторяется. Реле 22 времени при срабатывании через контакт 13(132) в режиме max (min) самоблокируется с помощью контакта 22. Одновремен но размыкается контакт 222 исключающий включение реле 21 , и заиыкается контакт 22.j, чере.з который напряжение из блока 2 передается в блок 3 или в блок 4 в зависимости от состояния контактов 14.) и 142, после чего размыкаются контакты 22 и 22, замыкается контакт 22 и выключается реле 22. Через некоторое время реле времени вновь замыкает контакт 20 и цикл повторяется. Оптимальное значение параметра блока запоминания в блоке 1, а оптимальное значение целевой функции запоминается в блоке 10.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР ,№674049, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для модеоирования процессов поиска | 1974 |
|
SU518779A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| (прототип). | |||
