12
Изобретение относится к технической кибернетике и предназначено для поддержания оптимальных режимов работы многомерных стохастических объектов управления.
Объект имеет два действующих аддитивно контролируемых входа: управляемый и неуправляемый, при этом имеется модель объекта по каналу контролируемый (но неуправляемый) вход-выход. Структура и параметры этой модели постоянны при различных значениях управляемого входного воздействия.
Цель изобретения повьшение точности и быстродёйств1 системы опти- мизации режимов работы объекта.
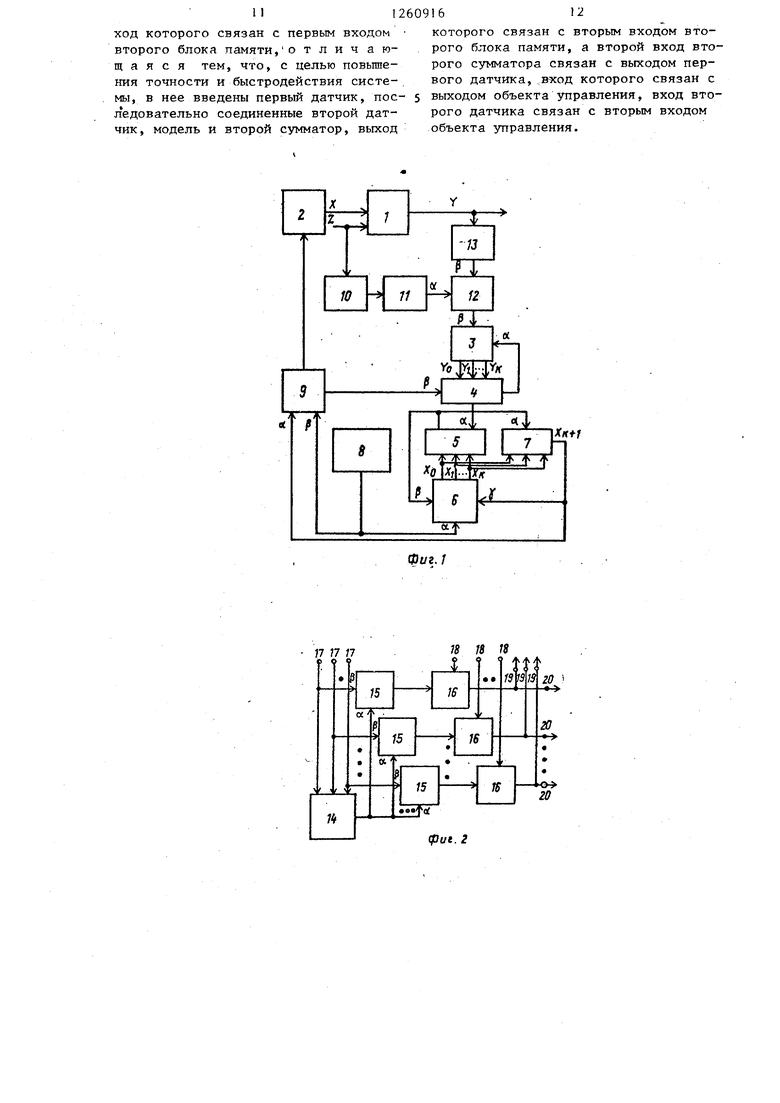
На фиг.1 приведена блок-схема системы оптимизации режимов работы объекта; на фиг.2 - структурная схема анализатора; выхода объекта; нафиг.З- структурная схема анализатора входа объекта; на фиг .4 - структурная схема переключателя; на фиг.5 - струк- турная схема первого блока памяти; на фиг.6 - структурная схема второго блока памяти; на фиг.7 - структурная схема блока планирования эксперимента; на фиг.8 - структурная схема первого сумматора; на фиг.9 - структурная схема командного блока.
Система оптимизации режимов работы объекта (фиг.1) содержит объект 1 управления, вход которого связан с выходом регулятор-а 2, второй блок 3 памяти, выход которого связан с первым входом анализатора 4 выхода объекта, анализатор 5 входа объекта, выход которого связан с вторым входом первого блока 6 памяти и первым входом сумматора 7, блок 8 планирования эксперимента, выход которого связан с первым входом первого блока 6 памяти и вторым входом командного блока 9, второй датчик 10, выход которого связан с входом модели 11, второй сумматор t2, выход которого связан с вторым входом второго блока 3 памяти, первый вход - с вьпсодом модели 11, а второй вход - с выходом первого датчика 13.
Устройство и работа системы приведены для К факторов оптимизации.
Анализатор выхода объекта 4 (фиг.2) содержит схему выбора максимальной или минимальной из нескольких переменных 14, К + 1 схем 15 совпадения, К + 1 ключей 16. Входы схем выбора максимальной из нескольких пе
0
5
0
5
0
5
50
55
ременных 14 и вторые схем 15 совпадения подключены к первому входу 17 анализатора 4 выхода объекта. Выход схемы выбора максимальной из нескольких переменных 14 соединен с первыми входами схем 15 совпадения, выходы которых соединены с входами ключей 16, управляющие входы которых подключены к второму входу 18 анализатора выхода объекта, а выходы - к первому выходу 19 и второму выходу 20 анализатора 4 выхода объекта.
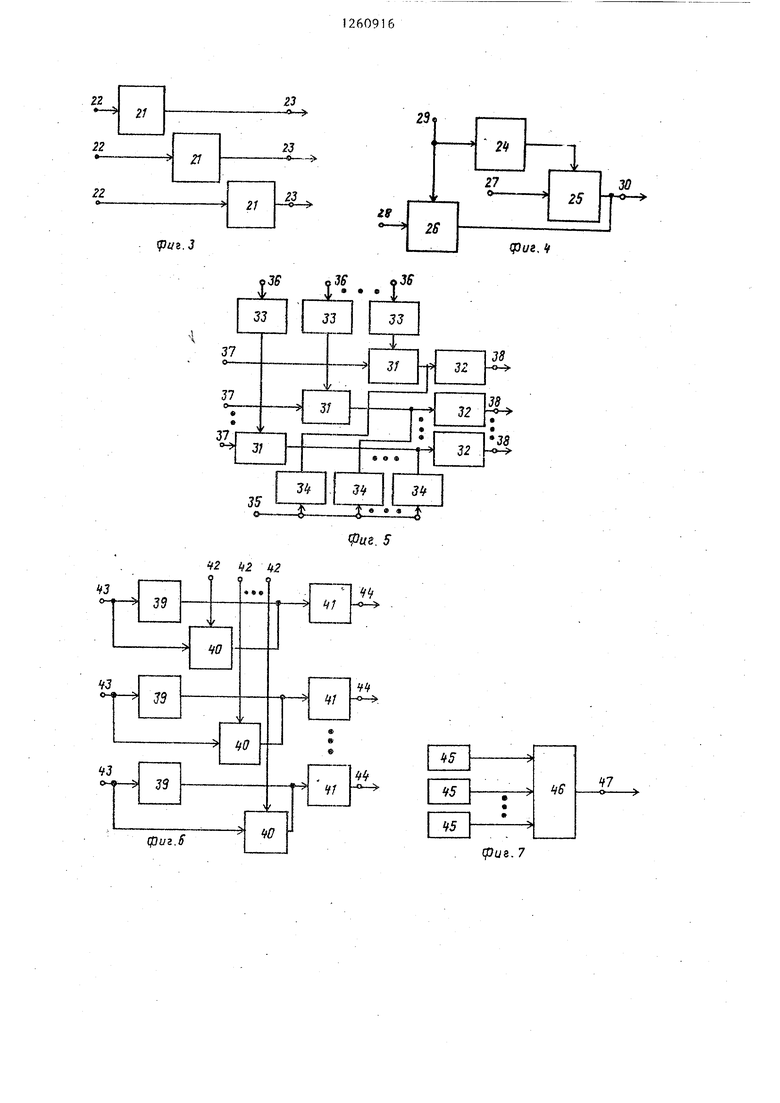
Анализатор 5 входа объекта (фиг.З) содержит К + 1 генераторов единичных сигналов 2I, входы которых подключены к первому входу 22, а выходы - к выходу 23 анализатора 5 входа объекта.
Переключатель (фиг.4) содержит элемент НЕ 24, первый ключ 25 и второй ключ 26. Вход первого ключа 25 связан с первым входом 27, а вход ВТОРОГО ключа 26 - с вторым входом 28 переключателя. Третий вход 29 переключателя связан с управляющим входом второго ключа 26 и входом элемента НЕ 24, выход которого связан с управляющим входом первого ключа 26. Выход 30 переключателя связан с выходом первого ключа 25 к с выходом второго ключа 26. Первый блок 6 памяти (фиг.5) содержит К + 1 ключей 31, К + 1 ячеек памяти 32, К +1 звеньев 33 запаздывания, К + 1 нормально замкнутых реле 34 времени. Входы реле времени связаны с первым входом 35 первого блока 6 памяти. Входы звеньев 33 запаздывания связаны с вторым входом 36 первого блока 6 памяти, входы клюней 31 связаны с третьим входом 37 первогс блока 6 памяти. Выходы звеньев 33 запаздывания связаны с управляющими входами ключей 31, выходы которых связаны с входами ячеек 32 памяти, выходы которых связаны с вьпсодом 38 первого блока 6 памяти. Выходы реле 34 связаны с входами ячеек 32 памяти.
Второй блок 3 памяти (фиг.6) содержит К + 1 нормально замкнутьк реле 39 времени, К + 1 ключей 40, К + 1 ячеек 41 памяти.
Управляющие входы ключей 40 связаны с первым входом 42 второго блока 3 памяти. Информационные входы реле 39 и ключей 40 связаны с вторым входом 43 второго блока 3 памяти. Выхо3 .12
ды реле 39 и ключей 40 связаны с входами ячеек 41 памяти, выходы которых являются выходами 44 второго блока 3 памяти.
Блок 8 планирования эксперимента (фиг.7) содержит К .+ I задатчи ков 45 подключенных к входам автоматического коммутатора 46, в код которого является выходом 47 блока 8 планирования эксперимента.
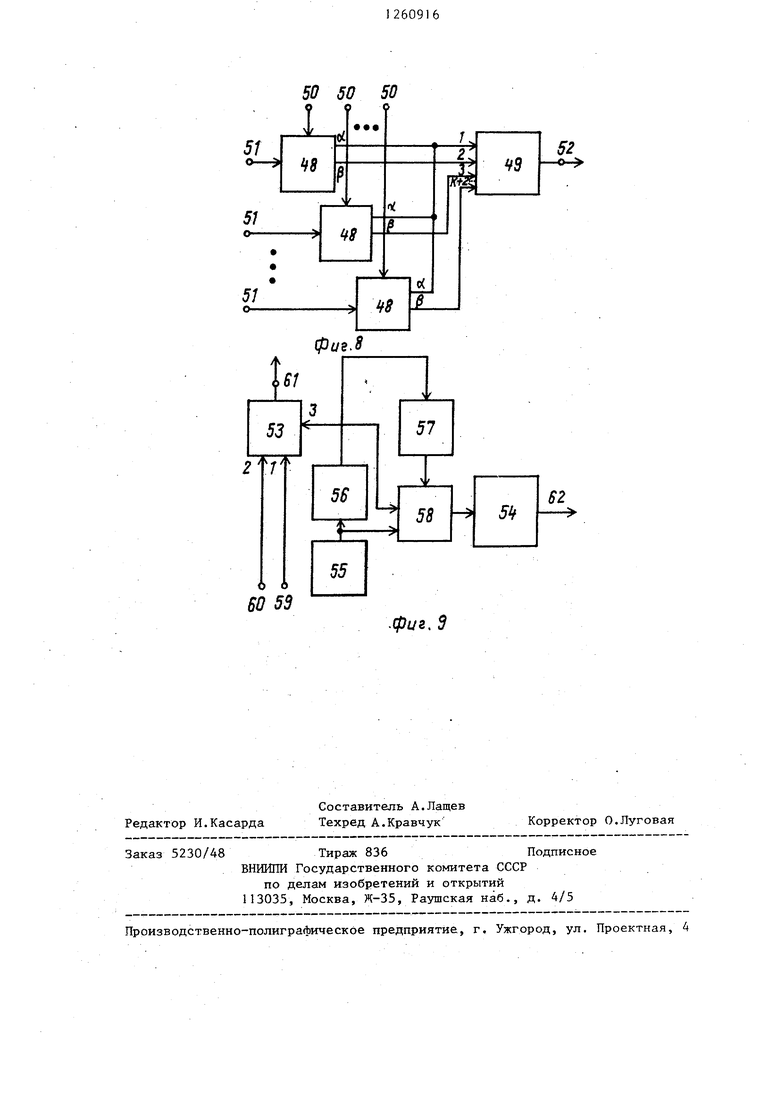
Первый сумматор 7 (фиг.8) содержит К + 1 переключателей 48 (фиг.4), подключенных в обратнзто сторону, сум
Это происходит следующим образом. В момент пуска автоматический коммутатор 46 (фиг.7) поочередно подключаматор 49. Первые выходы переключателей 48 соединены с первым входом сум- 5 ет задатчики 45 к выходу 47 блока 8 матора 49г вторые выходы - с вторым, планирования эксперимента через ин- третьим ..., К + 2-м входами сумматора 49, управляющие входы - с первым
входом 50, а информационные входы - с вторым входом 51 сумматора 7. Выход сумматора 49 является выходом 52 первого сумматора 7.
Командный блок 9 (фиг.9) содержит переключатель 53 (фиг.4), генератор
20
2 1. (К + 1), с начала отсчета
происходит запоминание сигналов в ячейках 32 памяти первого блока 6
тервалы времени г, , после чего отключается. Сформированные таким образом сигналы значений х последовательно подаются на первый вход 35 (фиг.5) первого блока 6 памяти. Через нормально замкнутые контакты реле 34 времени эти сигналы подаются на вход ячеек 32 памяти первого блока 6 памя54 единичных сигналов (аналогичный ти. После размыкания контактов реле генератору 21), мультивибратор 55, 34 времени в моменты времени t счетчик 56, звено 57 запаздьгоания, переключатель 58 ((|иг.4). Первый и второй входы переключателя 53 являются первым 59 и вторым 60 входами ко- 30 памяти. Отсчет времени срабатьшания мандного блока 9. Выход переключате- реле ведется с момента пуска системы, ля 53 является первым выходом 61 ко- Сигналы о входных воздействиях мандного блока 9. Выход генератора 54 единичных сигналов является вторым выходом командного блока 9.
Задачей оптимизации является поиск значений факторов, соответствующих экстремуму целевой функции.
Работа системы показана на примере задачи поиска минимума целевой функции.
В исходном состоянии на ячейках второго блока 3 памяти и первого блока 6 памяти записаны нули. На первом
х; последовательно подаются на второй вход командного блока 9 и далее 33 через регулятор 2, преобраз.ующий сигналы системы в физические воздействия, реализуются на объекте управления.
Получаемые при этом значения от- 40 кликов измеряются первым датчиком 13, Сигналы об этих значениях поступают на второй вход второго сумматора 12. Второй датчик 10 измеряет значения контролируемых, но неуправляемых 59, втором 60 входах (фиг.9) команд- 45 входных воздействий. Сигнал об этих ного блока 9, а также на выходах значениях с выхода второго датчика мультивибратора 55, счетчика 56, зве- 10 поступает на вход модели П. В мо- на 57 запаздывания, генератора 54 дели рассчитьгааются оценки эффекта единичных сигналов (фиг.9) в команд- лу влияния на выходную переменную ном блоке 9, звена 33 запаздывания so контролируемого, но неуправляемого (фиг.5), первого блока 6 памяти, ге- входного воздействия. Сигнал о значе- нератора 21 единичных сигналов ниях этих оценок подается на первый (фиг,3), анализатора 5 входа объекта, вход второго сумматора 12. а также блока П сравнения - нули. Во втором сумматоре 12 происходит Ключи 16 (фиг.2) анализатора выхода 55 вычитание эффектов л влияния конт- объекта 4, ключи 31 (фиг.5) первого ролируемого, но неуправляемого вход- блока 6 памятм, ключи 40 (фиг.6) вто- ного воздействия из значений откли- рого блока 3 памяти закрыты, Переклю- ,ков у; ,
чатели 53 и 58 (фиг.9) командного блока 9 открыты по второму входы и закрыты по первому.
В момент пуска блок планирования эксперимента начинает формировать входные воздействия х;,- согласно матрице насьпценного плана (симплекс- план) , которые по nepsotfy входу записываются в первый блок 6 памяти, а также подаются на второй вход командного блока 9.
Это происходит следующим образом. В момент пуска автоматический коммутатор 46 (фиг.7) поочередно подключа
ет задатчики 45 к выходу 47 блока 8 планирования эксперимента через ин-
20
2 1. (К + 1), с начала отсчета
происходит запоминание сигналов в ячейках 32 памяти первого блока 6
ти. После размыкания контактов реле 34 времени в моменты времени t памяти. Отсчет времени срабатьшания реле ведется с момента пуска системы, Сигналы о входных воздействиях
Полученные результаты у. у.-ду. поступают на второй вход второго блока 3 памяти и записываются в его ячейках.
Это происходит следующим образом. Сигналы о значении поступают на второй вход 43 (фиг.6) второго блока 3 памяти. Далее через нормально замкнутые контакты реле 39 времени эти сигналы подаются на вход ячеек 41 памяти (фиг.6)
Реле 39 времени настроены на время срабатывания t , 2Т ..., (K+l)t, соответственно и начинают отсчет времени одновременно с пуском систе- мы. После размыкания нормально замкнутого контакта реле 39 времени происходит запоминание сигнала о значении отклика в ячейке 41 памяти второго блока 3 памяти.
Таким образом, исходный план эксперимента реализован. После его реализации во всех ячейках первого блока 6 памяти и второго блока 3 памяти записаны соответственно значения фак торов и откликов. Причем, из значений откликов вычтены эффекты контролируемого, но неуправляемого входного воздействия.
После этого командный блок 9 от- ключается по второму входу, а на втором его выходе появляется командный сигнал. Это происходит следующим образом. Пачиная с момента пуска системы мультивибратор 55 (фиг.9) ко- мандного блока 9 генерирует импульсы с периодичностью t, .
Счетчик 56 (фиг.9) командного блока 9 считает количество импульсов сигналы с которых поступают на его вход с выхода мультивибратора 55. После генерации К + 1 импульса, а следовательно, после окончания формирования и реализации всех К + 1 воздействий, согласно исходному плану эксперимента на выходе счетчика 56 появляется управляющий сигнал, который поступает на третий вход переключателя 53 (фиг.9) командного блока 9, после чего он закрывается по вто- рому входу и открывается по первому. Управляющий сигнал с выхода счетчика 56 через второй вход переключателя 58 (фиг.9), который генерирует командный сигнал, поступает на второй выход 62 (фиг.9) командного блока 9.
Таким образом, командный блок 9 отключается по второму входу, а на
его втором выходе появляется командный сигнал.
Это состояние является исходным дпя осуществления собственно процесса оптимизации. Начало поиска оптимального режима работы объекта 1 управления начинается в момент подачи командного сигнала с второго выхо
да командного блока 9 на второй вход анализатора 4 выхода объекта.
Этот сигнал дает команду на выделение наихудшего отклика. Сигнал поступает на управляющие входы ключей 16 (фиг.2) в анализаторе 4 выхода объекта и открьгеает их. На выходе схемы выбора максимальной из нескольких переменных 14 (фиг.2) анализатора 4 выхода объекта формируется сигнал о значении наихудшего отклика Уд , выбранного из всех значений откликов у . Сигналы о значении откликов у ( поступают по первому входу 7 (фиг.2)i анализатора 4 выхода объекта. Сигнал о значении наихудшего отклика Уд с выхода- схемы выбора максимальной из нескольких переменных 14 подается на первые входы схем 5 совпадения (фиг.2). На вторые входы этих схем совпадения поданы сигналы о значениях откликов у/. На выходе схемы 15 совпадения, у которой совпали сигналы, поданные на ее входы, появляется управляющий сигнал. Этот сигнал через открытый ключ 16 поступает на первый выход 19 и второй выход 20 (фиг.2) анализатора 4 выхода объекта.
Таким образом, анализатор 4 выхода объекта вьщелил номер наихудшего отклика Уд. Сивнал о номере наихудшего отклика у с второго выхода анализатора 4 выхода объекта поступает на первый вход второго блока 3 памяти. При этом в соответствующей ячейке стирается т информация об наихудшем отклике у . Это происходит сле- дуюшлм образом. С второго выхода 20 (фиг.2) анализатора 4 выхода объекта сигнал поступает на первый вход 42 (фиг.6) второго блока 3 памяти, открывая соответствующий отклику у ключ 40 (фиг.6). В соответствующей ячейке происходит стирание информации о значении у. Ячейка готова к запоминанию информации, которое происходит при размыкании ключа 40.
Сигнал о номере выделенного наихудшего отклика у с первого выхода
анализатора 4 выхода объекта подается на первьй вход анализатора 5 входа объекта, в котором происходит выделение значений факторов, соответствующих наихудшему отклику. Это происходит следующим образом. С первого выхода 14 (фиг.2) анализатора 4 выхода объекта сигнал о номере вьще- ленного наихудшего отклика у поступает на первый вход 22 (фиг.З) анализатора 5 входа объекта. При этом включается соответствующий номеру наихудшего отклика у генератор 21
О
единичных сигналов и на выходе 23 (фиг.З) анализатора 5 входа объекта появляется сигнал о номере реализации факторов Хд, соответствующей наихудшему отклику у .
Таким образом, анализатор 5 входа объекта выделяет номер реализации факторов х, соответствующей наихудшему отклику у .
Сигнал о номере реализации факторов х, соответствующей наихудшему отклику Уо, подается на первый вход первого сумматора 7. На второй выход первого сумматора 7 с выхода первого блока 6 памяти поданы сигналы о значениях всех факторов х-. Первый сумматор 7 вычисляет новые значения факторов по формуле
- X,
X
1И
Это происходит следующим образом. На первый вход 50 (фиг.8) первого сумматора 7 поступает сигнал о номере реализации факторов х, соответствующей наихудшему отклику у. На второй вход 51 (фиг.8) первого суммато- ра 7 поступают сигналы о значении всех факторов .
На вход одного., из переключателей 48 (фиг.8) подан сигнал о значениях факторов х. Сигнал о номере реализации факторов х поступает на управляющий вход именно этого переключателя. При этом переключатель переключается на первый вьгход, и сигнал о значениях факторов х поступает на первый вход сумматора 49 (фиг.8). На входы остальных переключателей поданы сигналы о значениях всех факто- .ров X . кроме факторов х. При поступлении сигнала о номере реализации факторов х они переключаются на вторые входы, и сигнал о значении всех факторов X кроме факторов х посту0
5
0
5
0
пает на остапьные входы сумматора 49 (фиг. 8). Сумматор 49 вычисляет значе- ния факторов Х. на следующий шаг оптимизации. Таким образом, сумматор 7 вычисляет новые значения факторов X, на следуюшрт шаг оптимизации. Сигнал о номере реализации факторов Хд, соответствующей наихудшему отклику у, подается на второй вход первого блока 6 памяти, где информация об этой реализации стирается в соответствующей ячейке, Это происходит следзтощим образом. С выхода 23 (фис.3) анализатора 5 входа объект сигнал о номере реализации факторов х, соответствующей наихудшему отклику Ур, поступает на второй вход 36 (Лиг.5) первого блока 6 памяти. Далее этот сигнал через звено 33 запаздывания (фиг.З.) поступает на - ляюЕщй вход ключа 31 (фиг.5), соответствующего реализации факторов.
Время запаздывания звена 33 равно t . Поступление этого сигнала вызьгеа- ет открытие ключа 31, соответствующего реализации факторов, и стирание информации об этой реализации в соответствующей ячейке 32 первого блока памяти.
Таким образом, информация о реализации факторов Хд, соответствующей наихудшему отклику у , стирается в ячейке первого блока 6 памяти.
Сигнал о вычисленном значении факторов X..... подается на первый вход
tV т I
командного блока 9 и на третий вход первого блока 6 памяти, где записывается в освободившуюся ячейку.
Запись происходит следующим образом.
Сигнал о вычисленном значении Х,., с выхода 52 (фиг.8) первого сумматора 7 подается по третьему входу 37(фиг.5) первого блока 6 памяти и открытому ключу 31 в свободную ячейку 32 (фиг.5) первого блока 6 памяти и записывается в ней.
Таким образом, в первьш блок памяти записан сигнал о значении вычисленных факторов Х|., . .Этот же сигнал подан также на первый вход командного блока 9.
Через первый вход командного блока 9 сигнал о значении Х подается на вход регулятора 2 и реализуется на объекте управления. Отклик у поступает на второй вход второго сумматора и после вычитания из него эф912
фекта влияния контролируемого, но неуправляемого входного воздействия записывается в свободной ячейке второго блока памяти. На этом первый шаг поиска оптимального режима закан- чивается. Последующие итерации осуществляются аналогично первой, начиная с подачи командного сигнала с второго выхода командного блока 9 на второй вход анализатора 4 выхода объ- екта.
Командный сигнал формируется следующим образом.
После реализации исходного плана эксперимента и одновременно генера- ции мультивибратором 55 (фиг.9) К + 1 импульса на выходе счетчика 56 Формируется управляющий сигнал. Этот сигнал поступает на вход звена 57 запаздывания (фиг.9), время запаздывания которого , ). С выхода звена 57 запаздьтаания сигнал поступает на третий вход
переключателя 58, после чего он
закрывается по второму входу и открывается по первому. При этом, на вход генератора 54 единичных сигналов подключается мультивибратор 55. С выход мультивибратора 65, генерирующего импульсы с периодичностью Т, , через первый вход переключателя 58 сигнал о импульсе поступает на вход, генератора 54 единичных сигналов. На выходе генератора 54 единичных сигналов с периодичностью (т.е. после каж- дои итерации) формируется командный сигнал, поступаюпщй на второй вход 62 (фиг.9) командного блока 9.
Таким образом, в процессе работы системы осуществляется отражение симплекса и происходит последовательное улучшение отклика, ттоскольку при выделении наихудшего отклика учитывается эффект влияния контролируемого, но неуправляемого входного воздействия, то по сравнению с прототипом, уменьшается ошибка при выборе направления движения симплекса. Следовательно, уменьшается отклонение направления смещения симплекса от направления градиента функции отклика и повьш1ается скорость поиска. По той же причине повышается точность нахождения экстремума целевой функции.
В окрестностях экстремзпма симплекс совершает колебательные движения. Если оптимальная область объек
0
5
0
0
5
16 . - 10
тивно дрейфует, система отслеживает
этот дрейф.
Система может быть выполнена на i унифицированных элементах, ключах, ячейках памяти, схемах совпадения, коммутаторах, логических элементах, мультивибраторах, счетчиках, звеньях запаздывания, сумматорах и задатчи- ках.
Таким образом, введение в систему оптимизации режимов работы объекта первого датчика 13, второго датчика 10, модели 11 и второго сумматора 12 позволяет снизить ошибку при определении наихудшего отклика, а следовательно, и при выборе направления движения симплекса. Это позволяет, по сравнению с прототипом, повысить быстродействие системы и точность локализации экстремума.
Эффективность предлагаемой системы исследуется применительно к периоду чистрго кипения мартеновской плавки экспериментальнмм путем, а также методом имитационного моделирования. Целью оптимизации является определение расходов топлива и газообразных кислородоносителей, обеспечивающих максимальную скорость нагрева металла. Для этой задачи контролируемыми, но неуправляемыми входными воздействиями (возмущениями) являются присад-. ки в мартеновскую печь сыпучих материалов с целью придания необходимых
свойств щлаку. I
Формула изобретения
Система оптимизации режимов рабо- , ты объекта, содержащая первый блок памяти и блок планирования эксперимента, последовательно соединенные второй блок памяти, анализатор выхода объекта, анализатор входа объекта, первый сумматор, командный блок и регулятор, причем выход блока планирования эксперимента связан с вторым входом командного блока и первым входом первого блока памяти, выход анализатора входа объекта связан с вторым входом первого блока памяти, выход которого связан с вторым входом анализатора входа объекта и вторым входом первого сумматора, выход которого связан с третьим входом первого блока памяти, второй выход командного блока связан с вторым входом анализатора выхода объекта, второй выход которого связан с первым входом второго блока памяти, отличающаяся тем, что, с целью повьше- ния точности и быстродействия системы, в нее введены первый датчик, пос- 5 выходом объекта управления, вход втол едовательно соединенные второй датчик , модель и второй сумматор, выход
которого связан с вторым входом второго блока памяти, а второй вход второго сумматора связан с выходом первого датчика, вход которого связан с
рого датчика связан с вторым входом объекта управления.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимизации режимов работы объекта | 1984 |
|
SU1190362A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Система оптимизации режимов работы объекта | 1986 |
|
SU1345168A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система оптимизации режимов работы объекта | 1989 |
|
SU1636831A1 |
| Система автоматической оптимизации | 1983 |
|
SU1125602A1 |
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Устройство для взвешивания железнодорожного подвижного состава во время движения | 1982 |
|
SU1046621A1 |
Изобретение относится к технической кибернетике и позволяет повысить быстродействие и точность поиска и поддержания оптимальных режимов работы многомерных стохастических объектов управления, подверженных действию контролируемых возмущений, В момент, пуска блок планирования эксперимента генерирует входные воздействия согласно матрице насыщенного симплекс-плана, который реализуется на объекте управлеш я. Сумматор формирует новое значение входного воздействия, координаты новой вершины симплекса путем отражения вершины симплекса, соответствукяцего наихудшему отклику. Введение контура, включающего второй датчик, модель и второй сумматор, позволяет при определении наихудшего отклика, учесть влияние контролируемого возмущения. Это повышает быстродействие и точность поиска. 9 ил. а . (Л
I «i ,
50 50 50
60 59
Редактор И.Касарда
Составитель А.Лащев Техред А.Кравчук
Заказ 5230/48Тираж 836Подписное
БНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
.фиг, 3
Корректор О.Луговая
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
