Изобретение относится к автоматическому управлению и защите потенциально опасных объектов, работающих в условиях неконтролируемых возмущений, и может быть использовано в хи- мической, пищевой и других отраслях промышленности.
Целью изобретения является повышение эффективности и надежности эксплуатации потенциально опасного объ- екта. Достижение цели изобретения обусловлено тем, что в условиях неконтролируемых внешних возмущений и изменения параметров объекта управления реализуется изменение порогово го заданного значения регулируемой величины, в зависимости от статистических характеристик случайных колебаний регулируемой величины.
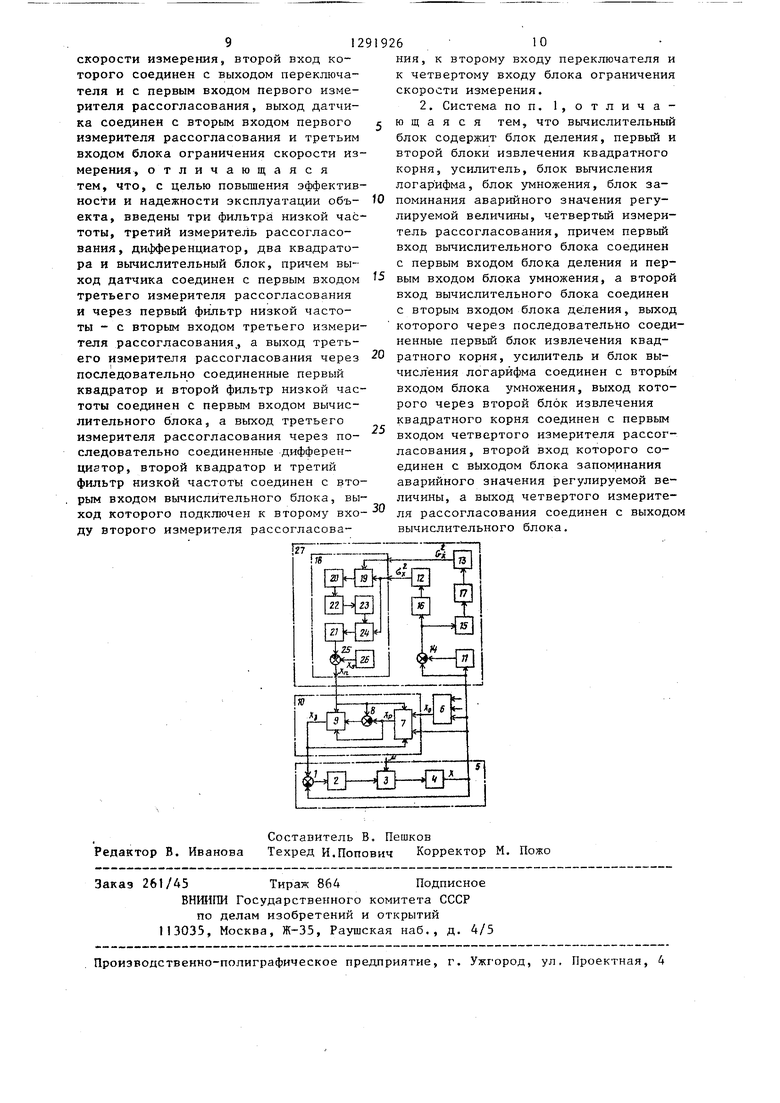
На чертеже представлена функцио- напъная схема устройства. Устройство содержит последовательно соединенные первьй измеритель 1 рассогласования, формирователь 2 сигнала управления, объект 3 управления, датчик 4, которые в совокупности составляют основной контур 5 управления.
Выход датчика 4 через последовательно соединенные оптимизатор 6 за- данного значения регулируемой величины, блок 7 ограничения скорости изменения и второй измеритель 8 рассогласования подключен к управляющему входу переключателя 9, блоки 7-9 состав- ляют блок 10 защиты, первый вход переключателя 9 подключен к выходу блока 7 ограничения скорости изменения, второй вход блока 7 ограничения скорости изменения соединен с выходом ne реключателя 9 и с цервым входом первого измерителя I-рассогласования, выход датчика 4 соединен с вторым входом первого измерителя рассоглаеова ния и третьим входом блока 7ограничекия скорости изменения. Устройство также содержит три фильтра 11-13 низкой частоты, третий измеритель 14 рассогласования, два квадратора 16 и 17, вычислительный блок 18, причем выход датчика 4 соединен с первым входом третьего измерителя 14 рассогласования и через фильтр низкой частоты - с вторым входом третьего измерителя 14 рассогласования, а выход третьего- измерителя 14 рассогласования через последовательно соединенные первый квадратор 16 и второй фильтр 12 низкой частоты соединен с первым входом вы
0
5
0 Q 5 0 5
числительного блока, а также третьего измерителя 14 рассогласования через последовательно соединенные дифференциатор 15, второй квадратор 17 и третий фильтр 13 низкой частоты соединен с вторым входом вычислительного блока 18, выход которого подключен к второму входу второго измерителя 8 рассогласования, к второму входу переключателя 9 и к чет-: вертому входу блока 7 ограничения скорости изменения.
В свою очередь вычислительный блок 18 содержит блок 19 деления, первый 20 и второй 21 блоки извлечения квадратного кор ня, усилитель 22, блок 23 вычисления логарифма, блок 24 умножения, четвертый измеритель 25 рассогласования, блок 26 запоминания аварийного значения регулируемой величины, первый вход вычислительного блока соединен с первым входом блока 19 деления и первым входом блока 24 .умножения, а второй вход вычислительного блока соединен с вторым входом блока 19 деления, выход которого через последовательно соединенные первый блок 20 извлечения квадратного корня, усилитель 22 и блок 23 вычисления логарифма 23 соединен с вторым входом блока 24 умножения, выход которого через второй блок 21 извлечения квадратного корня соединен с первым входом четвертого измерителя 25 рассогласования, второй вход которого соединен с выходом блока 26 запоминания аварийного значения регулируемой величины, а выход четвертого измерителя 25 рассогласования соединен с выходом вычислительного блока. Блоки П-26 в совокупности составляют блоки 27 настройки порогового значения регулируемой величины. I
Устройство работает следующим образом.
На практике у значительного большинства объектов управления неконтролируемые внешние возмущения имеют множество независимых друг от друга источников, поэтому изменения регулируемой величины во времени носят случайный характер, т.е. являются случайными процессами. Следовательно, выход регулируемой величины за аварийное значение будет представлять собой случайное событие, вepoятнocт возникновения которого зависит от
статистических свойств этих случайных процессов. В этом случае и надежность функционирования объекта ул- равления необходимо оценивать также вероятностной мерой, в частности ве- роятностью невыхода регулируемой величины за аварийное значение. Случайные колебания регулируемой величины X во времени t, т.е. случайные процессы X(t), возникают в результате воздействия на инерционный объект управления множества источников неконтролируемых внешних возмущений, и в силу этого закон распределения этих процессов близок к нормальному. Кор- реляционная функция случайных процессов X(t) характеризует качество работы основного контура управления (локальной системы стабилизации). В частности, время Т, ее спада до пре- небрежимо малых значений можно рас- смат ривать как среднее время компенсации возмущений.
Реальные процессы X(t) не являются стационарными вследствие нестаци- онарности во времени параметров, объекта управления и внешних возмущений. Скорость изменения этих параметров может быть оценена также временами спада Т , Т, соответствующих кор- реляционных функций параметров до пренебрежимо малых значений.
Так как у большого числа объектов управления скорость изменения их параметров и параметров внещних возму- щений относительно невысока и времена спада , Т значительно больше
TC TC Т.Т,, то это по зволяет принять гипотезу о квазистационарности параметров и на определе ном интервале времени считать процессы X(t) стационарными.
Рассматривая случайные процессы X(t) на скользящем интервале време- ни Т можно оперативно (с запаздыванием на t ) определять оценки их статистических характеристик - математического ожидания, дисперсии и др Рекомендуемая величина с (1-5)Т, т.е; является пренебрежимо малой величиной по сравнению с ..„ и Т.., .
l.(J СМ
Эксплуатация потенциально опасного объекта имеет смысл тогда, когда аварии, т.е. выходы (выбросы) регу лируемой величины X(t) за аварийное значение Хд являются исключительно редкими событиями. А в этом случае, с позиции теории вероятности, эти события незав- - имы и вероятность их появления может быть описана законом Пуассона. В частности, вероятность отрутствия события X(t) X на интервале времени для нормального закона распределения равна
Р.р ft) . «р - 11-
V .
где б ,б - среднеквадратическое отклонения регулируемой величины X(t) и ее производной за время с ;
га - математическое ожидание регулируемой величины X(t) за время С.
Эта вероятность определяет вероятность безаварийной работы на интервале и является той мерой, которая характеризует надежность (безопасность) эксплуатации потенциально опасного объекта.
Теоретически, в силу того, что нормальный закон распределения определен на бесконечных интервалах изменения аргумента, вероятность Р. всегда меньше 1, т.е. вероятность возникновения аварии (,. - Pgp О, Однако реально значения X(t) не могут изменяться в бесконечных пределах. Поэтому принято считать, что значения X(t) m,, t 36j, теоретическая вероятность появления которых составляет 0,003, практически появиться не могут.
Во время эксплуатации потенциально опасного объекта изменения его параметров и параметров внешних возмущений приводят к соответствующим изменениям статистических характеристик случайного процесса X(t). Оперативная оценка га, (j ,Cj jj на скользящем интервале времени б позволяет определить по зависимости (1) вероятность безаварийной работы (Т) практически в реальном масштабе времени, в темпе с технологическим процессом в .объекте.
Информация о т, j , G , Pgp (t) может быть использована не только для оценки надежности, но и для управления потенциально опасным объектом.
Так из (1) следует, что для обеспечения безаварийной эксплуатации потенциально опасного объекта на интервале времени (т..е. для обеспечения
РБР ()5 ) Де ДОПУ - тимая вероятность безаварийной работы
на этом интервале) математическое 1
ожидание регулируемой т не должно превышать порогового заданного значения
Хп Х,
{2Gl (( о).(2
.При Рльр фактическая вероятность безаварийной работы Рдвр Значение Рчьр зависит от вида реального закона распределения регулируемой величины X(t).
Оперативно оценивая изменения б , 6 jj регулируемой величины X(t) на скользящем интервале времени t при именении параметров объекта и внешних возмущений, предлагаемая система на- страивает по (2) пороговое заданное значение Х для основного контура управления (локальной системы стабилизации) , который и поддерживает среднее значени1 (математическое ожида- ние mj() на требуемом уровне,
В основном контуре 5 управления формирователь 2 сигнала управления вырабатывает управляющий сигнал на объект 3 так, что рассогласование на
выходе первого измерителя I рассогласования XT - X минимально, где Xi - заданное значение регулируемой величины, т.е. основной контур 5 управления отрабатывает изменение сигнала задания регулятору Хв и изменение значений внешних возмущений U по зависимости
Х(Р) W, (Р)Х(Р) +W(P) |rj(P),(3) где W,(P) и W(P) - передаточные функции основного контура 5 управления по каналу задания и возмущения.
Оптимизатор 6 заданного значения регулируемой величины по значениям регулируемой величины Х, поступающей с датчика А, и по значениям внешних параметров r,..,,q определяет оптимальное заданное значение регулируемой величины X, соответствующее экстремуму функции цели. Рассчитанная величина сигнала оптимального заданного значения Х поступает в блок 10 защиты, а именно на вход блока 7 ограничения скорости изменения заданно30
40
причем из-за наличия неконтролируемых внешних возмущений и инерционности основного контура 5 управления Х должно быть меньще Х. По знаку разности Хп - Хр, которая вычисляется на втором измерителе 8 рассогласования и поступает на управляющий вход переключателя 9, последний переключает свой выход на один из входов, куда поступают сигналы Х, с выхода бло- 35 ка 27 и Хр с выхода блока 7, т.е. реализуется зависимость.
ХР при Х - Хр О ,
Х„ при Xj, - Хр 0. Изменение интенсивности, спектрального состава неконтролируемых внешних возмущений (U и параметров объекта 3 управления во времени вызывают изменения статистических ха- 45 рактеристик случайного процесса X(t), что требует и соответствующей настройки порогового заданного значения Х„ по (2).
(5)
Реализацию зависимости (2) выполго значения регулируемой величины, на 50 няет блок 27 настройки порогового
заданного значения регулируемой величины. Значения X(t) с выхода датчика 4 регулируемой величины поступают на вход первого фильтра 1I низкой 55 частоты, который усредняет их на скользящем интервале времени . Технически наиболее просто выполнить фильтр низкой частоты в виде инерционного звена первого порядка-интеградругие входы которого поступают сигналы регулируемой величины X с выхода датчика 4, заданного значения Xi. регулируемой величины с выхода переключателя 9 и порогового заданного значения Х„ регулируемой величины с выхода блока 27. Ограничение скорости изменения оптимального заданного
значения X на определенном расчет
O
50
5
0
0
ном уровне Хр необходимо для того, чтобы, учитывая инерционность объекта 3 управления, ограничить скорость приближения регулируемой величины X к пороговому значению Х и тем самым не допустить таких выходов X за Х,, которые превышают аварийное значение Хд . Блок 7 может осуществлять эту функцию, например, по зависимостям
ГХ при V. - Vo 0; Р 1Х при V - V, 0; V К(Хп - X); X,
(4)
Vo Хо :v
-к ). где К - коэф()ициент пропорциональности.
Так как оптимизатор заданного значения регулируемой величины 6 определяет оптимальное заданное значение XQ по (4) без учета ограничения X(t) Xg, то заданное значение Х регулируемой величины необходимо ограничивать на пороговом значении Х,
причем из-за наличия неконтролируемых внешних возмущений и инерционности основного контура 5 управления Х должно быть меньще Х. По знаку разности Хп - Хр, которая вычисляется на втором измерителе 8 рассогласования и поступает на управляющий вход переключателя 9, последний переключает свой выход на один из входов, куда поступают сигналы Х, с выхода бло- 5 ка 27 и Хр с выхода блока 7, т.е. реализуется зависимость.
ХР при Х - Хр О ,
Х„ при Xj, - Хр 0. Изменение интенсивности, спектрального состава неконтролируемых внешних возмущений (U и параметров объекта 3 управления во времени вызывают изменения статистических ха- 5 рактеристик случайного процесса X(t), что требует и соответствующей настройки порогового заданного значения Х„ по (2).
(5)
тора, охваченного единичной отрицательной обратной связью, который реализует эскпоненциально взвешенное усреднение по зависимости 1 X(t,t) i- f exp (- -)) i
X x(t- c;)dt + x(t 0),
(6)
где X(t, o) - усредненный на скользящем интервале времени сигнал на выходе фильтра;
Т - постоянная интегрирования (Т, 0,5С);
X(t, t;) - сигнал на входе фильтра;
X() - значение начальных условий на интеграторе.
Третий измеритель 14 рассогласования определяет центрированный относительно X(t, o) случайный процесс Xii(t), как разность сигналов X(t) с выхода датчика 4 и X(t, t) с выхода первого фильтра I1 низкой частоты, т.е.
Xy(t) X(t) - X(t,r). Сигнал XuCt) с выхода третьего измерителя 14 рассогласования возводится в квадрат первым квадратором 16 и усредняется по формуле (6) на втором фильтре 12 низкой частоты, сигнал с выхода которого является оценкой дисперсии регулируемой величины на интервале D .
Этот же сигнал X(t) поступает на вход дифференциатора 16, .который совместно с вторым квадратором-17 и третьим фильтром 13 низкой частоты определяют оценку дисперсии производной регулируемой величины GJ на интервале о ,
Сигналы G X и (5 с выходов второго 1 2 и третьего 13 фильтров низкой частоты поступают на соответствзтощие входы вычислительного блока 18, ко- торьй при заданных аварийном значении регулируемой величины Хд .и допустимой вероятности безаварийной работы Pgg по зависимости (2) определяет пороговое заданное значение регулируемой величины Хр.
Усилитель 22 вводит коэффициент,
соответствующий l /21Г1п(--), а
„ блок запоминания аварийного значения
регулируемой величины 26 - значение Хд. Функции, выполняемые блоком 19 деления, первым 20 и вторым 21 блоками извлечения квадратного корня, блоком 23 вычисления логарифма, бло
ком 24 умно- -ения и четвертым измерителем 25 рассогласования, соответствуют своим наименованиям, а очередность их подключения вытекает из (2),
В начальный момент времени при
включении объекта 3 управления в работу пороговое заданное значение регулируемой величны Хр, устанавливается на безопасном уровне, исключающем
возникновение аварийной ситуации при наихудших реальных внешних возмущениях путем установки начальных условий на интеграторах второго 12 и третьего 13 фильтров низкой часто,ты.. При
накоплении информации о случайном процессе X(t) в течение скользящего интервала времени значение Х,, кор- ректируется блоком 27 с учетом вероятностных свойств данного случайного
процесса.
Устройство может быть реализовано на базе средств Государственной системы приборов и средств автоматизации, например, агрегатного комплекса электрических средств регулирования в микроэлектронном исполнении (АКЭСР).
Эффективность адаптивной системы автоматического управления потенциально опасным объектом состоит в том, что она позволяет повысить точность достижения экстремума функции цели на 20-30% за счет увеличения допустимой области изменения регулируемой величины и соответственно на 5-10% - технико-экономические показатели работы объекта управления. Кроме того, система устраняет, с вероятностью не менее заданной, возникновение аварийных
ситуаций, учитывая при этом вероятностные свойства регулируемой величины и изменение параметров объекта управления.
Формула изобретения
1. Адаптивная система управления потенциально опасным объектем, содержащая последовательно соединенные первый измеритель рассогласования,
формирователь сигнала управления, объект управления, датчик, оптимизатор заданного значения регулируемой величины, блок ограничения ско- рости изменения и второй измеритель
рассогласования, выход которого соединен с управляющим входом переключателя, первый ВХОД которого подключен к выходу блока ограничения
скорости измерения, второй вход которого соединен с выходом переключателя и с первым входом первого измерителя рассогласования, выход датчика соединен с вторым входом первого измерителя рассогласования и третьим входом блока ограничения скорости измерения, отличающаяся тем, что, с целью повьшенр я эффективности и надежности эксплуатации объ- Ю поминания аварийного значения регуекта, введены три фильтра низкой частоты, третий измеритель рассогласования, дифференциатор, два квадратора и вычислительный блок, причем выход датчика соединен с первым входом третьего измерителя рассогласования и через первый фильтр низкой частоты - с вторым входом третьего измерителя рассогласования,, а выход третьего измерителя рассогласования через последовательно соединенные первый квадратор и второй фильтр низкой частоты соединен с первьм входом вычислительного блока, а выход третьего измерителя рассогласования через последовательно соединенные дифференциатор, второй квадратор и третий фильтр низкой частоты соединен с вторым входом вычислительного блока, выход которого подключен к второму вхо- ду второго измерителя рассогласова
Составитель В, Пешков Редактор В. Иванова Техред И.Попович Корректор М.
Заказ 261/А5 Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4
ния, к второму входу переключателя и к четвертому входу блока ограничения скорости измерения.
2. Система по п. 1, отличающая с я тем, что вьиислительный блок содержит блок деления, первый и второй блоки извлечения квадратного корня, усилитель, блок вычисления логарифма, блок умножения, блок за
лируемой величины, четвертый измеритель рассогласования, причем первьй вход вычислительного блока соединен с первым входом блока деления и пер- вым входом блока умножения, а второй вход вычислительного блока соединен с вторым входом блока деления, выход которого через последовательно соединенные первьй блок извлечения квадратного корня, усилитель и блок вычисления логарифма соединен с вторым входом блока умножения, выход которого через второй блок извлечения квадратного корня соединен с первым входом четвертого измерителя рассогласования, второй вход которого соединен с выходом блока запоминания аварийного значения регулируемой величины, а выход четвертого измерителя рассогласования соединен с выходом вычислительного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Система регулирования | 1979 |
|
SU830294A1 |
| Устройство управления технологическим процессом | 1983 |
|
SU1153312A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Многоканальная система управления процессом приготовления смесей | 1974 |
|
SU732811A1 |
| Система управления пресс-гранулятором | 1985 |
|
SU1301726A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
Изобретение относится к области автоматики и предназначено для использования в химической, энергетической и т.п. областях. Цель изобретения - повышение эффективности и надежности эксплуатации потенциально опасного объекта в условиях неконтролируемых внешних возмущений и изменения свойств объекта. Система включает объект управления, датчик регулируемой величины, первый измеритель рассогласования, формирователь сигнала управления, оптимизатор заданного значения регулируемой величины, блок ограничения скорости изменения заданного значения регулируемой величины, второй измеритель рассогласования и ключ. Новым в системе является первый фильтр низкой частоты и третий измеритель рассогласования , которые определяют случайную составляющую колебаний регулируемой величины; квадратор и второй фильтр низкой частоты, определяющие оценку дисперсии случайных колебаний регулируемой величины; дифференциатор, второй квадратор и третий фильтр низкой частоты, определяющие оценку дисперсии производной случайных колебаний регулируемой величины на скользящем интервале; вычислител - ный блок, состоящий из блока деления, первого и второго блоков извлечения квадратного корня, блока вычисления логарифма, блока умножения, четвертого измерителя рассогласовния и блока запоминания аварийного значения регулируемой величины, который определяет пороговое заданное значение регулируемой величины в зависимости от статистических характеристик случайных колебаний регулируемой величины. Система может быть полностью реализована на серийно выпускаемом рборудовании и удовлетворяет требованиям высокоавтоматизированной технологии. 1 ил. i (Л 1C со со N9 О)
| Свешников А.А | |||
| Прикладные методы теории случайных функций | |||
| М.: Наука, 1968, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
