Изобретение относится к техническим средствам информационных систем и может быть использовано для повышения помехоустойчивости и расширения области применения устройств для определения направления движения и подсчета числа объектов раз™ личной конфигурации и ширины или групп объектов, перемещающихся в двух противоположных направлениях. Известно устройство для подсчёта предметов, содержащее датчики у подключенные к: блоку пороговых элементов, триггер, соединенный с коммутатором и блоком элементов И, и счетчики fl .
Недостатками данного устроз ства являются низкая точность и надежность устройства.
Наиболее близким к предлагаемому является устройство для подсчета предметов, движущихся в двух противоположных Направлениях, содержащее два датчика, выходы каждого из. которых подключены к входу соответствующего формирователя импульсов и инвертора, пять элементов И, выходы калсдого инвертора соединены с первым входом соответствующего элемента И, выход второго элемента И подключен к первому входу элемента ИЛИ, триггеры, прямой выход первого триггера соединен с первым входом пятого элемента И, третий формирователь импульсов и элемент задержки, формирователи соединены с соответствующими элементами И 2 ,
Недостатком известного устройства является невозможность подсчета движущихся предметов с шириной меньшей, чем расстояние между точками визирования датчиков, что ограничивает его применение для подсчета движущихся предметов произвольной ширины
Цель изобретения - повышение точности устройства.
Поставленная цель достигается тем, что в устройство, содержащее два датчика, выходы каждого из которых подключены к входу соответствующего форгтирователя импульсов и инвертора, пять элементов И, выходы каждого инвертора соединены с первым входом соответствующего элемен та И, выход второго элемента И подключен к первому входу элемента ИЛИ триггер, прямой выход первого тригi epa соединен с nepBHLM входом пятого элемента И, третий формирозатель импульсов и элемент задержки j, введены шестой элемент И, третий инвертор и третий триггер, выходы первого и второго датчиков подключены к вторым входам второго и первого элементов И соответственно, выхой первого формирователя импульсов соединен с первыми входами первого и второго триггеров, выход второго формирователя импульсов подключен;; к Bl-dpo iy входу первого триггера и к первому входу третьего триггера, второй вход которого coejftiHeH с вто-, рым входом второго триггера и с выходом третьего элемента И, выход элемента ИЛИ через третий формирователь импульсов подключен к перво0му входу четвертого элемента И, второй и третий входы которого соединены с инверсными выходами второго и третьего триггеров соответственно, инверсный выход первого триггера подключен к первому входу шестого
5 элемента И, второй вход которого и второй вход пятого элемента И .объединены и соединены с выходом четвертого элемента И, который подключен к входу третьего инвертора,.
0 выход которого через элемент задержки соединен с первым входом третьего элемента И, второй вход которого подключен к входу устройства,
5
В качестве датчиков могут быть использованы..любые датчики перемещения с дискретным выходом, например фотоэлекСгрические, контактные, индуктивные.
0
Расстояние между точками визирования ддатчиков не зависит от ширины объекта, и при прохождении объектов сложной конфигурации или группы объектов через зону контроля оно должно быть больше ширины просветов в объекте или расстояния между объектами соответственно.
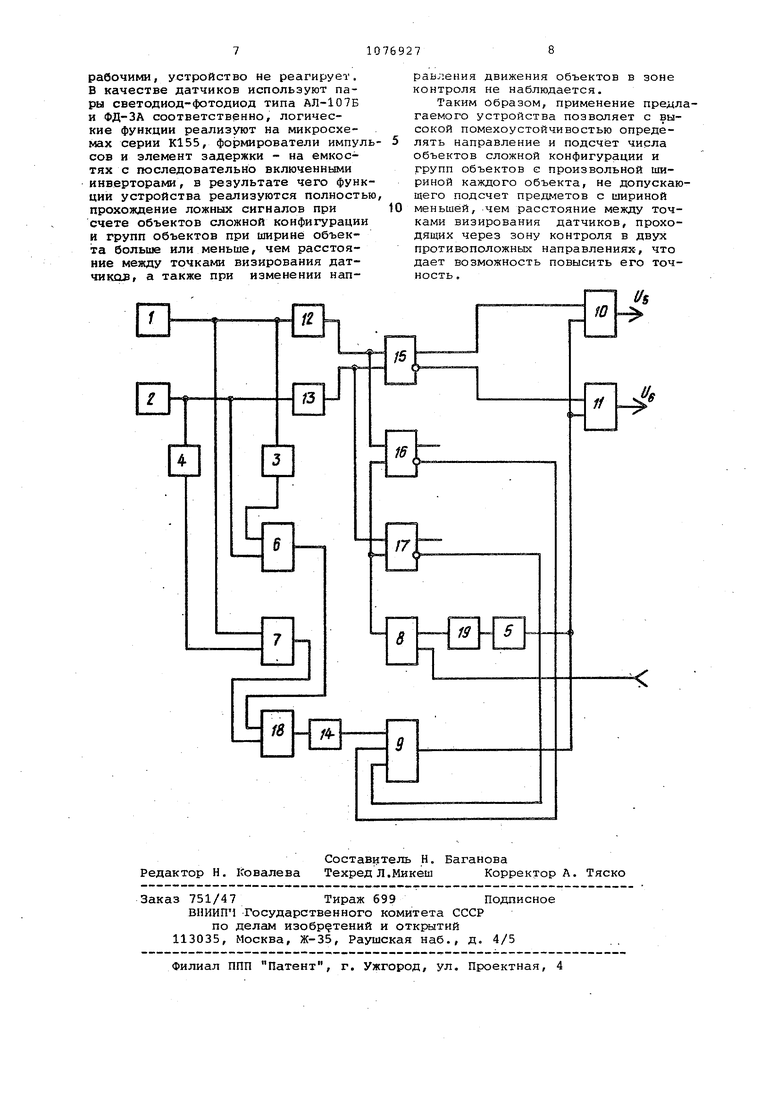
На чертеже представлена функциональная схема предлагаемого устройства
Устройство состоит из датчиков 1 и 2, инверторов 3-5, элементов И 6-11, формирователей 12-14 импульсов, триггеров 16-17, элемента ИЛИ 18, элемента 19 задержки.
В исходном состоянии,, определяемом отсутствием объекта в зоне контроля датчиков 1 и 2 и подачей импульса Сброс О на нулевые вхо-ды триггеров 16 и 17 через элемент И 8, на выходах датчиков 1 и 2 и формирователей 12 и 13 импульсов появляется сигнал 1, положение триггера 15 произвольное, на нулевых выходах триггеров 16 и 17 сигнал О, элементы И 6 и 7 блокированы отсутствием сигналов на выходах инверторов 3 и 4, элемент ИЛИ 18 - отсутствием сигналов на выходах элементов И 6 и 7, формирователь 14 импульсов, на выходе которого сигнал О, - отсутствием сидрнала на выходе элемента 1-ШИ 18, инвертор 5 и элементы И 10 и 11 отсутствием сигнала на выходе элемента И 9,
Импульс Сброс может подавать Ся в устройство только один раз перед началом его работы. Во всех остальных случаях на вход элемента И 8 в процессе работы устройства от источника питания (не показан) поступает сигнал 1.
В зависимости от направления движения объекта и его ширины по .отношению к расстоянию между точками визирования датчиков 1 и 2 сигналы О с их выходов могут появляться в следующей последовательности.
При движении объекта условно Вперед.
11,01,11,10,11 - ширина объекта меньше, чем расстояние между точками визирования датчиков;
11,01,00,10,11 - ширина объекта больше, чем расстояние между точками визирования датчиков.
При движении объекта условно Назад.
j; 11,10,11,01,11 - ширина объекта меньше, чем расстояние между точками визирования датчиков,
11,10,00,01,11 - ширина объекта больше, чем расстояние между точка ми визирования датчиков.
Рассмотрим случай движения объекта Вперед при его ширине меньше, чем расстояние между точками визирования.датчиков. При этом сначала срабатывает датчик 1 и сигнал О с-eto выхода поступает на первый вход элемента И 7 и на вход инвертора 3 и на вход формировател 12, выдающего короткий импульс О который устанавливает триггеры 15 и 16 в нулевое состояние. Одновременно сигналом 1 с выхода инверsTopa 3 разблокируется элемент И б/ :Ь выхода которого сигнал 1 через элемент ИЛИ 18 вызывает появление импульса 1 на выходе формирователя 14, т.е. на первом входе элемента И 9, блокированного сигналом О с выхода триггера 17. При попадании объекта в зону между точками Визирования датчиков отпускает датчик 1, что приводит к блокировке элементов И б и 7 и формирователей 12-14, т.е. установленное предыдущее состояние схемы устройства не изменяется.
При дальнейшем продвижении объекта Вперед срабатывает датчик 2, что вызывает появление на выхоше формирователя 13 импульса О, который перекидывает триггеры 15 и 17 соответственно в единичное и нулевое состояние. В этот момент
с выхода инвертора
сигналом
4 происходит разблокирование элемента И 7, и сигнал 1 с его выхода черев элемент ИЛИ 18 вызывает (Появление на выходе формирователя 14 импульса 1, который через разблокированные элементы И 9 и 10 формируется в выходной сигнал Вперед и, пройдя последовательно включенные инвертор 5, задержку 19 и элемент И 8, устанавливают триггер 16
и 17 в единичные состояния, приводя схему в исходное положение.
При выходе объекта из зоны контроля отпускает датчик 2, сигнал 1 с Выхода которого блокирует формирователь 13, и совместно с сигналом 1 с выхода -датчика 1 - элементы И 6 и 7 и через элемент ИЛИ 18 - формирователь 14. Таким образом, исходное состояние устройства
сохраняется.
Аналогично работает схема при движении объекта Назад. При этом выходной сигнал формируется на выходе элемента И 11.
При движении объекта Вперед или Назад с шириной большей, чем расстояние между точками визирования датчиков На их выходах, наблюдаются комбинации сигналов, представленные
выше. Как видно из этих комбинаций, до срабатывания датчика 2 при движении объекта Вперед (датчика 1 при движении объекта Назад) схема работает, как и в предыдущем случав.
Затем срабатывает датчик 2 (1) при сохранении во включенном состоянии датчика 1 (2). Сигналами О с выходов датчиков 1 и 2 блокируются элементы И 6-и .7 и через элемент ИЛИ 18 - формирователь 14.
В момент срабатывания датчика
2 (1) на выходе формирователя 13 (12) появляется импульс О. Так как к моменту его возникновения завершается формирование импульса
О на выходе формирователя 12 (13), то этот импульс перебрасывает триггер 15 и 17 (16) соответственно в единичное (нулевое )(и нулевое состояния.
При дальнейшем продвижении объекта отпускает датчик 1 (2), разблокируется элемент И 7, и сигналом 1 с его выхода через элемент ИЛИ 18 формирователь 14, что вызывает появление на его выходе импульса 1, который через разблокированнйе элементы И 9 и 10 (11) формируется в выходной сигнал Вперед (Назад), и, пройдя последовательно соединенные инвертор 5, задегшку 19 и элемент ИЗ, устанавливает триггеры 16 и 17 в единичное состояние, приво.дя схему в исходное положение.
Возможны ситуации, когда объект изменяет направление движения в зоне контроля,. что соответствует еле-дующим возможным комбинациям сигналов с выходов датчиков.
11,01,11,10,11,01,11 --при шири не объекта меньше, чем расстояниемежду точками визирования датчиков 11,01,00,10,00,01,11 - при шири объекта больше, чем расстояние между точками визирования датчиков В обоих случаях до срабатывания датчика 2 и отпускания датчика 1 схема работает аналогично вышеописанной. Затем объект изменяет направле- ние движения и вместо выхода efo и зоны контроля и отпускания датчика 2 следует в первом случае попадани объекта в зону между точками визирования датчиков, во втором - срабатыванием датчика 1„ В первом случае это вызывает от пускание датчика 2 и приведение, сх мы в исходное состояние, как указа но ранее. При дальнейшем продвижении объекта Назад срабатывает да , чик 1, что вызывает появление импу са О на выходе формирователя 12, который обнуляет триггеры 15 и 16, Одновременно происходит разблокирование сигналами с выходов датчиков 1 и 2 элемента И б и сигнал 1.с его выхода через элемент ИЛИ 18 вызывает формирование импульса 1 на выходе формирователя 14. Им пульс не открывает элемент И 9., та как он заблокирован сигналом О с выхода триггера 17, тем самым.пр дотвращается выдача ложных сигнало на выводе схемы. Далее следует отпускание датчика 1, При этом сиЕна-лами с выходов датчиков блокиругот ся элементы И б и 7,- и через элемен ;:ИЛИ 18 - формирователь 14. На яыходах схемы сигналы отсутствуют. При движении следующего объекта в направлении Вперед (На- зад) часть схемы, содержащая инвер торы 3 и 4, элементы И б и 7, элемент ИЛИ 18, формирователь 14, работает как выше описано. При срабатывании датчика 1 (2) на выходе формирователя 12 (13) образуется импульс О, который подтверждает Нулевое состояние триг геров 15, и 16 (или обнуляет триггеры 15 и i 7),. Сигнал на выходах элементов И 10 и 11 отсутствует, так как элемент И 9 заблокирован сигналом О с нулевого выхода триггера 17. выходе элемента И 11 появляется сигнал Назад, так ка-к элемент И 9 разблокируется сигналами 1 с выходов триггеров 16 и 17. Одно-временно сигналом 1, сформироваН ным на выходе элемента И 9 и прошедшим через последовательно.включенные инвертор 5, задержку 19, елемент- И 8, устанавливенотся в единичное состояние триггеры 16 и 17 и схема подготавливается к новому циклу.. При отпускании датчика 1 (2) схема предыдущего состояния не меняет. Последующее включение датчика 2 (1) вызывает появление импульса О на выходе формирователя 13 (12), который перебрасывает триггеры 15, 17 (16) соответственно в единичное (нулевое) и нулевое состояния. В тот же г.хзмент времени образуется импульс 1 с выхода формирователя 14, который, пройдя через разблокированные элементы И 9 и 10, сформирует на выходе схемы сигнал Вперед и через последовательно включенные инвертор 5, задержку 19, элемент И 8 установит в единичное состояние триггеры 16 и 17 (сигналы на выходах элементов И 10 и 11 отсутствуют, так как элемент И 9 заблокирован сигналом О с выхода триггера 17). При отпускании датчика 2 (1) предыдущее состояние схемы не меняется. Схема готова для подсчета следующих объектов. Во втором случае возвращение объекта вызывает срабатывание датчика 1, что приводит к появлению импульса О на выходе формирователя 12, который обнуляет триггеры 15 и 16. Одновременно сигналом О с выходов датчиков 1 и 2 блокируются элементы и 7 и 6 соответственно, которые, в свою очередь создают совместно с элементом ИЛИ 18 сигнал блокировки на входе формирователи 14. При последующем продвижении объекта отпускает датчик 2 и работа схеглы повторяется, как и в первом случае. Движение объектов слОжной конфигурации, имеющих просветыили груп-:. пы объектов, перемещающихся в одном; направлении с промежутками между ни| ми меньшими, чем расстояние между датчиками, соответствует следующим комбинациям сигналов датчиков: 11,01,11,01,,,,00,11,ОС,,,10,11, lO,,,,ll - при ширине объекта меньше, чем расстояние между датчиками;11,01,00,10,00,01,00. ...10, - . при ширине объекта больше, чем асстояние между датчиками. Схема будет работать также, как при движении одного объекта.. Устройство выдает сигнал Вперед (или Назад) только при следующей последовательной смене режимов работы датчиков: срабатывание датчика 1. (2), отпускание датчика 1 (2), срабатывание датчика 2(1). На все остальные повторяющиеся комбинации сигналов формируемые на выходах датчиков в промежутках между
рабочими, устройство не реагирует. В качестве датчиков используют пары светодиод-фотодиод типа АЛ-107Б и ФД-ЗА соответственно, логические функции реализуют на микросхемах серии К155, формирователи импуль сов и элемент задержки - на емкостях с последовательно включенными инверторами, в результате чего функции устройства реализуются полностью прохождение ложных сигналов при счете объектов сложной конфигурации и групп объектов при ширине объекта больше или меньше, чем расстояние между точками визирования датчиков, а также при изменении направления движения объектов в зоне контроля не наблюдается.
Таким Образом, применение предлгаемого устройства позволяет с высокой помехоустойчивостью определять направление и подсчет числа объектов сложной конфигурации и групп объектов е произвольной шириной каждого объекта, не допускающего подсчет предметов с шириной меньшей, чем расстояние между точками визирования датчиков, проходящих через зону контроля в двух противоположных направлениях, что дает возможность повысить его точность .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для счета движущихся предметов | 1984 |
|
SU1243004A1 |
| Устройство для подсчета предметов, движущихся в двух противоположных направлениях | 1979 |
|
SU767795A1 |
| Устройство для подсчета предметов | 1975 |
|
SU590789A1 |
| Устройство для контроля перемещения рабочего органа машины | 1984 |
|
SU1236524A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство управления самоходным средством | 1988 |
|
SU1689921A1 |
| Устройство для автоматическогоОпРЕдЕлЕНия HOMEPA и НАпРАВлЕ-Ния дВижЕНия Об'ЕКТА | 1979 |
|
SU798951A1 |
| Устройство для определения этапов прокатки | 1988 |
|
SU1533796A2 |
| Устройство для счета движущихся изделий | 1986 |
|
SU1388920A1 |
| Устройство управления позиционером | 1990 |
|
SU1739386A1 |
УСТРОЙСТЮ ДЛЯ ПОДСЧЕТА ПРЕДМЕТОВ,. ДВИЖУЩИХСЯ В ДВУХ ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ,.содержащее два датчика, выходы каждого из которых подключены к входу соответствующего формирователя импульсов и инвертора, пять элементов И, выходы каждого инвертора соединены с первым входом Соответствующего элемён;та И, выход второго элемента И подключен к первому входу элеменiTa ИЛИ, триггеры, прямой выход перiBoro триггера соединен с первый входом пятого элемента И, третий формирователь импульсов и элемент задержки, отличающееся тем, , с целью повышения точности, в него введены шестой элемент ,И, третий инвертор и третий триггер. выходы первого и второго датчиков подключены к вторьм входам второго и первого элементов И соответственно, выход первого формирователя импульсов соединен с первыми входами первого и второго триггеров, « выход второго формирователя импульсов подключен к второму входу первого триггера и к первому входу третьего триггера, второй вход которого соединен с вторым входом второго триггера и с выходом третьего элемента И, выход элемента ИЛИ через третий- формирователь импульсов подключен к первому входу четвертого элемента И, второй и третий входы которого соединены с инверсными выходами второго и третьего триггеров соответственно, инверсный выход первого триггера подключен к первому входу шестого элемента И, второй вход которого и второй вход пятого элемента И объединены и сое.динены с выходом четвертого элемента И, который подключен к входу третьего инвертора, выход которого через, элемент задержки соединен с первым входом третьего элемента И, втО рой йход которого подключен к входу устройства. а Г) ND 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР 760140, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для подсчета предметов, движущихся в двух противоположных направлениях | 1979 |
|
SU767795A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
