(54) УСТРОЙСТВО ДЛЯ ПОДСЧЕТА ПРЕДМЕТОВ, ДОНЖУЩИХСЛ В ДВУХ П ОТИВОШЛОЖНЫХ НАПРАВЛЕНИЯХ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подсчета предметов,движущихся в двух противоположных направлениях | 1982 |
|
SU1076927A1 |
| Устройство для управления перемещением | 1983 |
|
SU1091121A1 |
| Селектор импульсов по длительности и фазе | 1981 |
|
SU966881A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Устройство для контроля состояния объектов | 1986 |
|
SU1368902A1 |
| Формирователь импульсов датчика положения | 1991 |
|
SU1836661A3 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Устройство для подсчета предметов | 1975 |
|
SU590789A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| Устройство для приема и обработки команд телеуправления | 1989 |
|
SU1667137A1 |
; . -. . .-,.- V , -:,:.- ,:
Изобретение относится к области техничес- ких средств информационных систем и йожет быть использовано для повь1шен1м прмёхо устойчивости и расширения области п|)йМёнення устройств для определения направления , движения и подсчета числа объекТрв рййиной конфигуращш или групп объектов, перемещающихся в двух противо положных нап1 авлениях... -:, ...:,-л:, г;л:J-.,-.
Известны устройства для реверсивного сче- j|j та движущихся объектбв, содержащие датчики, подключеннь1е к счетным входам первого и второго триггеров, нулевой и единичньш выходы первого из которых ч ерезд йфферейадрующие цепочки подключаются на входы coot-,j ветственно первого и второго злемёнтов И, единичный выход второго триггера - непосредственно на другие входы элементов И Ш
Недостатком такого устройства является прохождение ложных сигналов при двизкении JQ объектов с промежутком между ними меньшим, чем расстояние между датчиками и при изменении направления движения объектов в зоне контроля.
11аиболее близким по технической сущности йвзтяется устройство для группового количества предметов, перемещаемых в двух ПротивополЬ)Кнзыкн равленияХ, содержащие Дат41пси, подкшоЧйнйые к первь1м входам элементов И, ;выхЪдь1квторых подключены к единичным входам трйггерсй, инверторы эле менты ИЛИ, ИЛИ-НЕ, эйейеитЫ задержки, третий и четвёртый элемейты И 21.
Недостатком TaKord устройства является Возможность прохождёйия сигналов при нёкотЬрь1Х реально возникашцих ситуащях, связаиная с тем,что cHraaiBbi на выходе устройства формируются До полного выхода объе1ста из зоны контроля.
Целью предлагаемого изобретошя является повышение помехоустойчивости устройства и расширение области его применения.
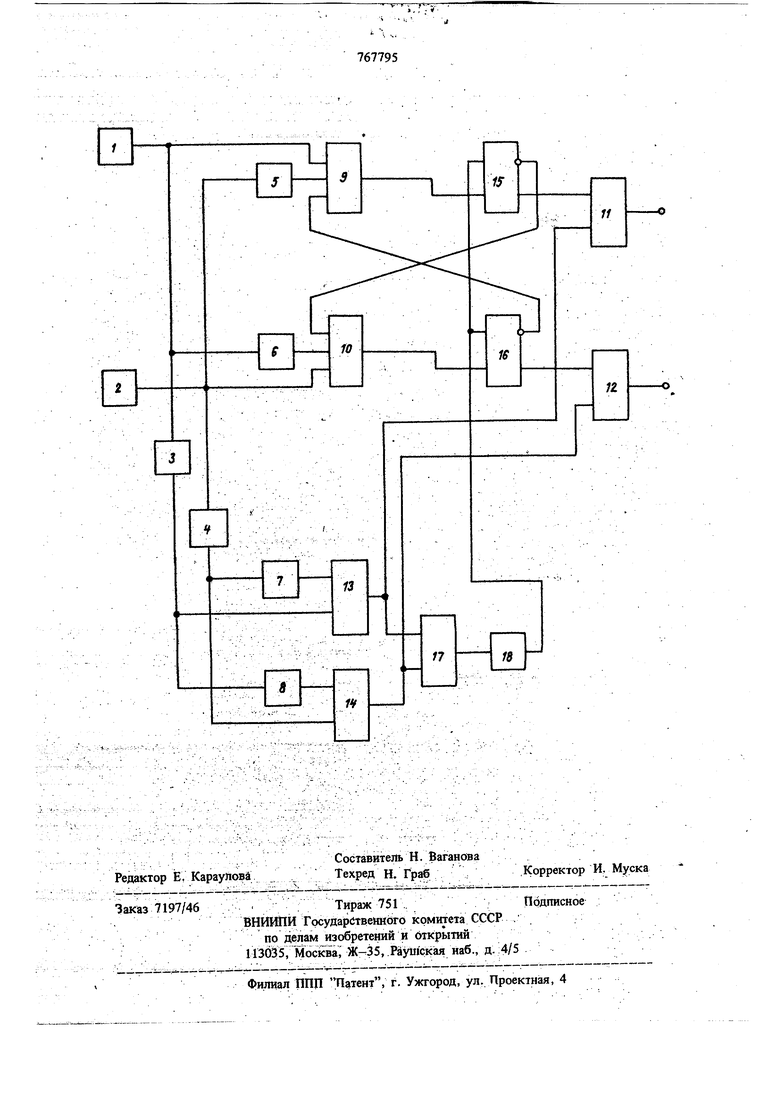
Поставлешая цель достигается тем, что в устройство, содержащее два датчика, подключенных соответственно к первьп 4 входам первого и второго элементов И, выходы которых Подключень к едийичньш входам соответственно первого и второго триггеров, два инвертора, элемент ИЛИ, элемеит задержки, третий и четвертый элементы И, введены четыре формирователя импульсов, пятый и шестой элементы И, выход первого датчика подключен череэ второй формирователь импульсов к второму входу второго элемента И, и череэ первый инвертор - к первому входу пятого , элемента И и к входу четвертого формирователя импульсов, выход которого подключен к П1врвому входу шестого элемента И, выход второго датчика подключен через первый формирователь импульсов к второму входу первого элемента И, и череэ второй инвертор - к второму входу шестого элемента И, и входу третьего формирователя импульсов, выход которого подключен к второму входу пятого элемента И, выход пятого элемента И и первый вход третьего элемента И объединены и подаслйчейы к первому вХЬйуэМмента ИЛИ, выход шестого элемента И и первый вход четвертого элемента И объединены и соединень с вторым входогл элемента ИЛИ, выход которого подключен через элемент задержки на нулевые вхЬды триггеров, нулевые выходы первого и второго триггеров соединены : соответственно с третьими входами Второго и первого элементов И, едишршые в 1ходы перйого и второго триггера подключены соответственно к вторым входам третьего и четвертого элементов И.
В качестве датчиков могут быть использованы любые Датчики перемещения с дискретным выходом, напрж ер кс«такткые, фотоэлектрические, индуктию1ые.
Расстояние меящу точками визироваиия датчиков выбирается таким образом, чтобы оно было меньше, чем ширина объекта, и при прохождешш объектов сложной конфигурации через зону ктароля в момент времени хотя бы один из дatчикoв находался в сработанном состоянии.
На чертеже представлена функциональная хема устройства. . Устройство состоит из Датчиков 1, 2 инвероров 3, 4, форм$фователей импульсов 5, 6, , 8, элементов И 9, 0, И, 12, 3, 14, тригеров 15, 16, элемента ИЛИ 17, эпемета адержки 18.. ч- :.;„ -;:-i«---;..-..-.---v-.v:.;.,,-.:-vv -
В исходном состоянии на единичных выхоах триггеров 15, 16 сигнал О, на нулевых Г , элементы И 9, 10 блокированы отсутствим сигналов на выходах датчиков 1, 2 и форир1ователёй импульсов 5, 6, элементы И 13, 14 - отсутствием сигналов на выходах формирователей 7, 8, элементы И 11, 12 - отсутствием сигналов на выходах элементов И 13, 14 и на единичных выходах триггеров 15, 16.
.В зависимости от направления движения объекта сигналы 1 с датчиков I, 2 могут появляться в следующей последовательности: 00, 10, II,- 01, 00 - при движении объекта условно вперед
00, 01. Л; 10, 00 - при движении объекта условно назад.
Рассмотрим случай движения объекта вперед. .,
0 При этом сначала срабатывает датчик 1 и сигнал 1 с его выхода поступает на вход элемента И 9, подготавливая его к работе и на вход формирователя 6, выдающего короткий импульс на вход элемента И 9, подго5 тавливая его к работе и на вход формирователя 6, Выдающего короткий импульс на вход элемента И 10, блокированного отсутствием сигнала на выходе датчика .2. В момент срабатывания датчика 2 на выходе формирова0 теля 5 появляется импульс, отйрывающий элемент И 9, сигнал с выхода которого перекидывает триггер 15 в. единичное состояние, в результате чего элемент И 11 подготавливается к работе, а элемент И 10 блокируется
5 сигналом О с нулевого выхода триггера 15. Затем по мере продвижения вперед объекта отпускает датчик 1, что вызывает появление сигнала 1 на выходе инвертора 3, т.е. на входе элемента И 13, а также появление имQ пульса на форми зователя 8, однако элемент И 14 остается закрытым, так как вторрй его вход блокирован нулевым сигналом с выхода инвертора 4. При отпускании датчика 2 сигнал 1 b инвертора 4 поступает на дру, гой вход элемента И 14, заблокированного отсутствием импулыса с выхода формирователя 8 и на вход формирователя 7, импульс с выхоДа которого открывает элемент И 13. Сигнал 1 с вйхода элемента И 13 nocTjoiaeT
на вход элемента И И, формирую1цего вьщодной сигнал вперед, и пройдя последовательно элемент ИЛИ 17 изадержку 18, обнуляет триггер 15, приводя схему в исходное состояние. Аналогично работает схема при движении
, объекта назад. При зтом выходной сигнал формируется на выходе элемента И 12. Возмойдаы ситуации, когда объект изменяет направление движения в. зоне контроля, что соответствует следутощей комбинации сигналов с датчиков: ,
00, 10, 11, 01, 11, 10, 00.
При этом до отпускания „датчика 1 схема работает как указано выше. Затем объект изменяет направление движения и вместо отпускания датчика 2 следует -срабатывание датчика 1. Это вь1зывает появление импульса на выходе , формирователя 6. Импульс не открывает эл« мент И 10, так как элемент заблокирован сигналом О с нулевого выхода триггера 15,
тем самым предотвращается псребрась1ва ше триггера 16 в единичное состояние, а значит и выдача ложных сигналов на выходе схемы. Далее следует отпускание датчика 2 и датчика 1. При этом формируется сигнал 1 на выходе элемента И 14, который, пройдя последовательнй элементы ИЛИ 17 и задержку 18, обнуляет триггер 15 и подготавливает схему к нов.ому циклу.
При движении объектов сложной конфигурации, имеющих просветы, или групп объектов, перемешивающихся в одном направлении с промежутками между ними меньшими, чем расстояние между датчиками, что соответствует сле дующей комбинации сигналов датчиков:
00, 10, 11, 01, 11, 10, 11... 01, 00
схема будет работать как при движении одного объекта.
При последовательном срабатывании сначала датчика 1, а эатем датчика 2, вызванных движением первого объекта группы или первой части объекта сложной конфигурации, триггер 15 перекинется в едини шое состояние и тем самым подготовит к работе элемент И 11, а элемент И 10 заблокирует, что предотвратит перекидывание триггера 16 при срабатывании и отпускании датчиков 1 и 2 по мере продвижения следующих объектов группы или частей объекта конфигурации. Сигнал на выходе схемы появится лищь при отпускании датчика 2 после прохождения последнего объек та или последней части объекта. При этом
сигнал 1, сформированный на выходе эле мента И 13 откроет элемент И 11, выдающий выходной сипгал вперед. .
Для проверки правильности технических рещений был разработан, изготовлен и испытан макет устройства. В качестве датчиков были использованы фотореле типа ФРСУ-4, логические функции были реализованы на микросхемах серии К 155, формирователи импульсов и элемент задержки - на емкостях с последовательно включенными инверторами. . Испытания макета устройства показали, что функции устройства реализуются полностью прохождения ложных сигналов при сЧете объектов сложной конфигурации и групп объектов а также при измерении йаправления движения объектов в зоне контроля не наблюдалось.
Все эти признаки предлагаемого устройства позволяют Избежать прохождения ложных сигналов при определении направления и подсчета числа объектов сложной конфигурации и групп объектовj проходящих через зону контроля с произвольными промежутками между отдельными объектами, а также при изменении направления движения объектов в зоне контроля что дает возможность повысить достоверность информации, выдвваемой устройством и расщирить область его применения.
Формула изобретения
Устройство для подсчета предметов, движущихся в двух противоположных направлениях, содержащее датчики, подключенные соответственно к первым входам первого и второго элементов И, выходы которых подключены к еданичным входам соответственно первого И второго триггеров, два инвертора, элемент ИЛИ элемент задержки, третий и четвертый элементь1 И, отличающееся тем, что, . с целью повышения помехоустойчивости и расширения области применения, в него введены четыре формирователя импульсов, пятый и шестой элемент И, выход первого датчика подкл рчен через второй формирователь импульсов к второму входу второго элемента И, и через первый инвертор - к первому входу пятого элемента И и ко входу четвертого формирователя импульсов, выход которого подключен к первому входу шестого элемента И, выход второго Датчигса подключен через первый формирователь импульсов ко второму входу первого элемента И, и через второй инвертор - к второму входу шестого элемента И входу : третьего формирователя импульсов, выход которого подключён ко второму входу пятого элемента И, выходы пятого элемента И и первый вход третьего элемента И объединены и подключены к первому входу элемента ИЛИ, выход шестого элемента И и первый вход четвертого элемента И объединены и соединены со вторым входом элемента ИЛИ, выход которого подключен через элемент задержки на нулевые входы триггеров, нулевые выходы первого и второго триггеров соединены соответствеюю с третьими входами второго и первого элементов И, единичные выходы первого и второго триггера подключены соответственно к вторым входам третьего и четвертого элементов И. Название изобретения приведено в соответствии с рубрикой МКИ.
Источники информации,
принятые во внимание прИ экспертизе
