(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления однофазным инвертором напряжения | 1982 |
|
SU1062838A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1261116A1 |
| Устройство для управления регулируемым мостовым инвертором напряжения | 1984 |
|
SU1239809A1 |
| Многоканальное программное задающее устройство | 1986 |
|
SU1383297A1 |
| Устройство для сопряжения вычислительной машины с датчиками | 1982 |
|
SU1070540A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1035629A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478332A1 |
| Преобразователь сдвига фазы в код | 1983 |
|
SU1104565A1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
Изобретение относится к технике хранения информации на подвижном дисковом носителе. Цель изобретения - упрощение устройства и расширение его функциональных возможностей. Устройство обеспечивает как перемещение позиционера на любое произвольное количество позиций, так и слежение за заданной (достигнутой) позицией. Слежение обеспечивается цепью узлов: выходы датчика 1 или инверторов 2 или 3 - коммутатор 4 - коммутатор 18 - регулятор 22 - усилитель 21 мощности - линейный двигатель 17. Перемещение обеспечивается цепью: счетчик 6 - управляемый источник 13 напряжения 
х|
со чэ со
00
о
коммутатор 18 - регулятор 22 - усилитель 21 -двигатель 17. Величина перемещения задается кодом с входной шины КОД ПЕРЕ- МЕЩЕНИЯ. Начало перемещения задается импульсом по шине ВПЕРЕД или НАЗАД. Во время перемещения сигнал с выхода коммутатора 4 сравнивается с напряжениями источников 9,10, срабатывают компараторы 11 или 12, узел 16 вырабатывает счетные импульсы. Счетчик 5 переклюИзобретение относится к технике хранения информации на подвижном дисковом носителе и может быть использовано в оптических, магнитных и иных запоминающих устройствах с радиальным перемещением головок записи-воспроизведения относительно носителя информации, преимущественно для предварительной разметки носителя или для записи оптического диска- оригинала.
Известно устройство управления приводом каретки магнитного накопителя, которое содержит усилитель мощности, электродвигатель, растровый датчик положения, аналоговый коммутатор и узел уп- равления.
Однако данное устройство способно к перемещению каретки за один такт работы только на одну позицию, что сужает его функциональные возможности. Кроме того, в устройстве использован растровый датчик перемещения, обладающий низкой дискретностью. Поэтому устройство нельзя применить для работы в оптическом накопителе, где требуется высокая поперечная плотность расположения дорожек.
Известно устройство для позиционирования головок записи-воспроизведения, имеющее в своем составе интерферометри- ческий датчик перемещения, способное по- зиционировать с высокой дискретностью на произвольное расстояние. Устройство содержит интерферометрический датчик перемещения каретки, саму каретку, усилители-ограничители, блок определения на- правления перемещния, преобразователь кода, реверсивный счетчик, шину управления, первый вычислитель, суммирующий блок, ЦАП, усилитель, суммирующий блок, ЦАП, усилитель мощности, линейный элек- тродвигатель, двухполупериодный выпрямитель, АЦП, второй вычислитель, дополнительный двухполупериодный выпрямитель, дополнительный АЦП, дополнительный вычислитель, логический комму-
чает входы коммутатора 4, счетчик 6 подсчитывает количество пройденных позиций. При достижении счетчиком 6 нулевого состояния перемещение прекращается, вновь организуется цепь слежения. Триггеры 7 и 8, узел выделения нулевого состояния счетчика 14, элемент ИЛИ 15, формирователи 19 и 20 являются элементами управления и организуют переключение режимов работы. 2 з.п. ф-лы, 7 ил.
татор, дополнительный суммирующий блок, дополнительный преобразователь кода и регистр.
Однако данное устройство является слишком сложным. Другой существенный недостаток данного устройства - невозможность слежения за заданной позицией, что проводит к сужению его функциональных возможностей.
Наиболее близким по технической сущности к предлагаемому является устройство для позиционирования головок записи-воспроизведения, которое содержит интерферометрический датчик перемещения, первый и второй компараторы, аналоговый коммутатор, первый и второй инверторы, блок определения направления перемещения, преобразователь кодов, реверсивный счетчик, шину управления, первый вычислитель, суммирующий блок, ЦАП, усилитель мощности, линейный электродвигатель с кареткой, АЦП и второй вычислитель.
Хотя это устройство и проще предыдущего, оно также является достаточно сложным и функционально незавершенным, так как и в нем отсутствуют средства для слежения за заданной позицией.
Цель изобретения - упрощение устройства и расширение его функциональных возможностей.
Поставленная цель достигается тем, что в устройство, содержащее первый и второй компараторы, многоразрядный реверсивный счетчик, усилитель мощности, выход которого подключен к входу линейного двигателя, кинематически связанного с кареткой, на которой закреплены головка записи-воспроизведения и подвижная часть интерферометрического датчика перемещения, а также неподвижную часть интерферо- метрического датчика, первый выход которого подключен к первому аналоговому входу первого аналогового коммутатора и входу первого аналогового инвертора, второй выход которого подключен к второму
аналоговому входу первого аналогового коммутатора и входу второго аналогового инвертора, а выходы первого и второго аналоговых инверторов соединены соответственно с третьим и четвертым аналоговыми входами первого аналогового коммутатора, введены двухразрядный реверсивный счетчик, первый и второй RS-триггеры, логический элемент ИЛИ, первый и второй формирователи, управляемый источник напряжения, узел выделения нулевого содержимого счетчика, узел выделения счетных импульсов, второй аналоговый коммутатор, источники положительного и отрицательного напряжений, регулятор, причем выход первого аналогового коммутатора соединен с первыми входами первого и второго компараторов и первым аналоговым входом второго аналогового коммутатора, вторые входы первого и второго компараторов соединены соответственно с выходами источников положительного и отрицательного напряжений, выходы первого и второго компараторов подключены соответственно к первому и второму входам узла выделения счетных импульсов, первый выход которого подключен к суммирующему входу двухразрядного реверсивного счетчика и к вычитающему входу многоразрядного реверсивного счетчика, а второй выход - к вычитающему входу двухразрядного реверсивного счетчика и к суммирующему входу многоразрядного реверсивного счетчика, младший и старший выходы двухразрядного счетчика подключены соответственно к младшему и старшему управляющим входам первого аналогового коммутатора, информационные входы многоразрядного реверсивного счетчика соединены с входной шиной КОД ПЕРЕМЕЩЕНИЯ, выходы счетчика - с выходами управляемого источника напряжения и узла выделения нулевого содержимого счетчика, выход управляемого источника напряжения подключен к второму аналоговому входу второго аналогового коммутатора, выход узла выделения нулевого содержимого счетчика соединен с входом первого формирователя, выход которого подключен к R-входам первого и второго RS-триггеров, 3-входы которых соединены с входными шинами ВПЕРЕД и НАЗАД соответственно, а выходы которых подключены к входам элемента ИЛИ и к третьему и четвертому входам соответственно узла выделения счетных импульсов, выход элемента ИЛИ подключен к управляющему входу второго аналогового коммутатора и к входу второго формирователя, выход которого соединен с входом занесения многоразрядного
счетчика, выход второго аналогового коммутатора подключен к входу регулятора, выход которого соединен с входом усилителя мощности.
Дополнительной целью изобретения
является повышение надежности функционирования счетных импульсов.
Указанная цель достигается тем, что узел выделения счетных импульсов содер0 жит генератор тактовых импульсов, первый и второй D-триггеры, срабатывающие по фронту, со сбросом, первый, второй, третий и четвертый формирователи, первый и второй элементы И, причем информационные
5 входы (входы D) первого и второго триггеров являются первым и вторым входами узла соответственно, первые входы первого и второго элементов И являются третьим и четвертым входами узла соответственно, а
0 выходы первого и второго элементов И являются первым и вторым выходами узла соответственно, выход генератора соединен с синхронизирующими входами (входами С) первого и второго триггеров, выходы
5 которых подключены к вхрдам первого и второго формирователей соответственно, выходы которых подключены соответственно к вторым входам первого и второго элементов И и к входам третьего и четвертого
0 формирователей, выходы которых, в свою очередь, подключены к входам сброса (входам R) первого и второго триггеров соответственно.
Еще одной дополнительной целью изо5 бретения является повышение надежности функционирования устройства в условиях сильных вибраций в режиме отслеживания заданной позиции.
Для достижения указанной цели в уст0 ройство дополнительно введены третий, четвертый и пятый аналоговые коммутаторы, дополнительный источник положительного напряжения, дополнительный источник отрицательного напряжения и
5 первый и второй аналоговые сумматоры, причем третий аналоговый коммутатор включен между вторым коммутатором и регулятором следующим образом: выход второго коммутатора подключен к первому
0 аналоговому входу третьего коммутатора, а выход третьего коммутатора подключен к входу регулятора, второй и третий аналоговые входы третьего коммутатора подключены соответственно к выходам первого и
5 второго сумматоров, первые входы которых подключены к выходам дополнительного источника положительного напряжения и дополнительного источника отрицательного напряжения соответственно, а вторые входы соединены соответственно с выходами
четвертого и пятого коммутаторов, четвертый аналоговый вход четвертого коммутатора соединен с вторым аналоговым входом пятого коммутатора и с первым аналоговым входом первого коммутатора, первый аналоговый вход четвертого коммутатора сое- динен с третьим аналоговым входом пятого коммутатора и с вторым аналоговым входом первого коммутатора, второй аналоговый вход четвертого коммутатора соединен с четвертым аналоговым входом пятого коммутатора и с третьим аналоговым входом первого коммутатора, третий аналоговый вход четвертого коммутатора соединен с первым аналоговым входом пятого коммутатора и с четвертым аналоговым входом первого коммутатора, младший и старший управляющие входы четвертого и пятого коммутаторов соединены соответственно с младшим и старшим выходами двухразрядного счетчика, младший управляющий вход третьего коммутатора соединен с выходом первого компаратора, а старший управляющий вход - с выходом второго компаратора.
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - структурная схема узла выделения счетных импульсов; на фиг. 3 - структурная схема дополнительной части устройства; на фиг. 4 - приведены временные диаграммы работы отдельных узлов устройства при перемещении вперед; на фиг, 5 - то же, при перемещении назад; на фиг. 6 - временные диаграммы работы элементов, составляющих узел выделения счетных импульсов; на фиг. 7 - временные диаграммы работы дополнительных блоков устройства.
Устройство (фиг. 1) содержит интерфе- рометрический датчик 1 перемещения, первый 2 и второй 3 аналоговые инверторы, первый 4 аналоговый коммутатор, двухразрядный реверсивный счетчик 5, многоразрядный реверсивный счетчик 6, первый 7 и второй 8 RS-триггеры, источники положительного 9 и отрицательного 10 напряжений, первый 11 и второй 12 компараторы, управляемый источник 13 напряжения, узел 14 выделения нулевого содержимого счетчика, логический элемент ИЛИ 15, узел 16 выделения счетных импульсов, линейный двигатель 17с закрепленной на его движущейся части кареткой с головкой записи- воспроизведения и подвижной частью интерферометрического датчика, второй аналоговый коммутатор 18, первый 19 и второй 20 формирователи, усилитель 21 мощности и регулятор 22.
Первый выход датчика 1 соединен с первым аналоговым входом коммутатора 4 и
входом инвертора 2, выход которого соединен с третьим аналоговым входом коммутатора 4. Второй выход датчика 1 соединен с вторым аналоговым входом коммутатора 4 и
входом инвертора 3, выход которого соединен с четвертым аналоговым входом коммутатора 4. Выход последнего подключен к первым входам компараторов 11 и 12 и к первому аналоговому входу коммутатора
подключена к входу S первого триггера, выход которого подключен к третьему входу узла 16 выделения счетных импульсов и к первому входу элемента ИЛИ 15. Входная шина НАЗАД соединена с входом S второго триггера, выход которого подключен к четвертому входу узла 16 и второму входу элемента ИЛ И 15, Выходы источников 9 и 10 подключены соответственно к вторым входам компараторов 11 и 12. Выход управляемого источника 13 соединен с вторым входом аналогового коммутатора 18. Выход узла 14 соединен с входом формирователя 19, выход которого подключен к R-входам триггеров 7 и 8, Выход элемента ИЛИ 15
подключен к входу формирователя 20 и к управляющему входу аналогового коммутатора 18, Первый выход узла 16 подключен к суммирующему входу (+1) счетчика 5 и к вычитающему входу (-1) счетчика 6, второй выход узла 16 подключен к вычитающему входу счетчика 5 и к суммирующему входу счетчика 6. Линейный двигатель 17 кинематически связан с интерферометри- ческим датчиком 1. Выход коммутатора 18
соединен с выходом регулятора 22. Выход формирователя 20 подключен к входу занесения (входу L) счетчика 6. Выход усилителя 21 подключен к входу двигателя 17. Выход регулятора 22 подключен к входу усилителя 21.
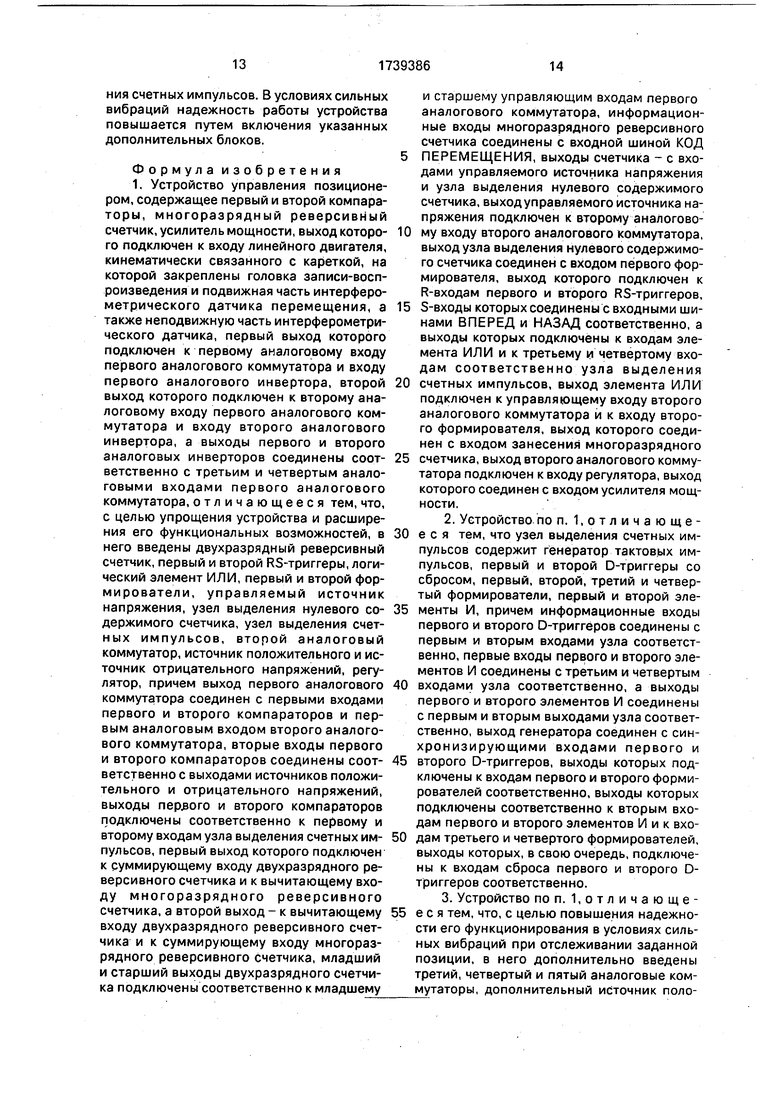
Узел выделения счетных импульсов 16 (фиг, 2) имеет первый вход 23, третий вход 24, четвертый вход 25, второй вход 26 и состоит из генератора 27тактовых импульсов, первого 28 и второго 29 D-триггеров, срабатывающих по фронту, со сбросом, первого 30 и второго 31 формирователей, третьего 32 формирователя, первого 33 и второго 34 элементов И, четвертого формирешателя 35. Первый и второй выходы помечены цифрами 36 и 37.
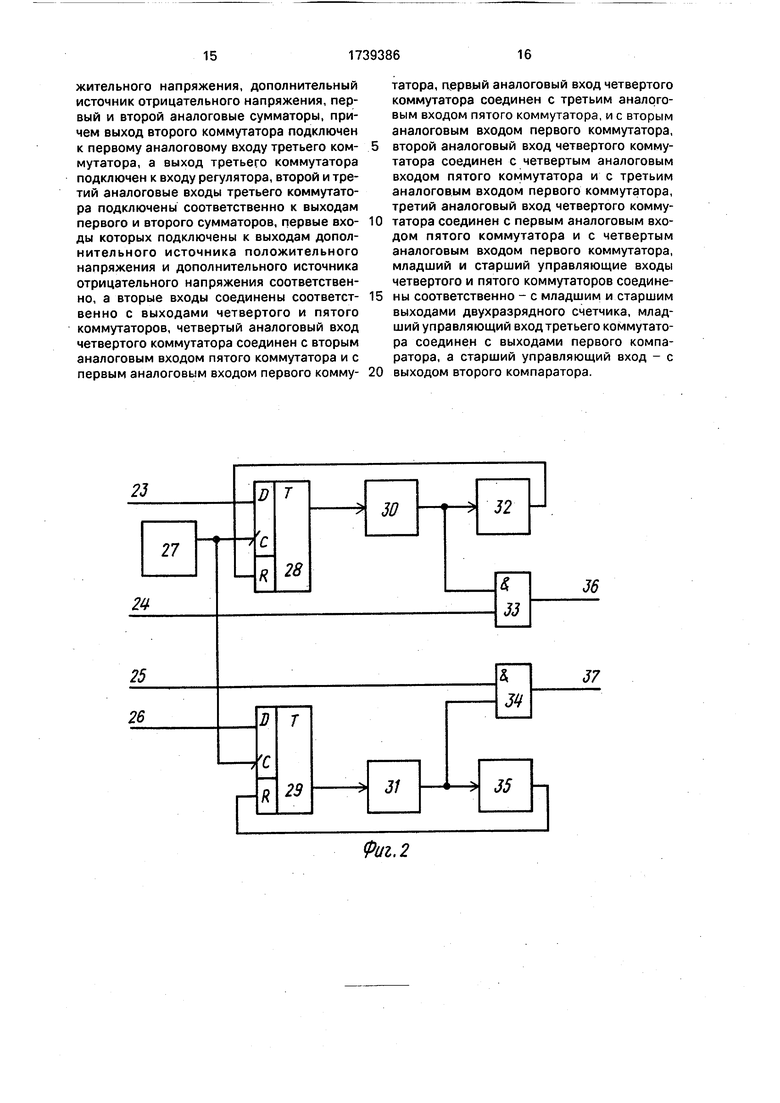
Входы дополнительных блоков устройства (фиг. 3) подключены к выходу первого компаратора 11 Свход 45). второго компаратора 12 (вход 46), младшему (вход 47) и старшему (вход 48 выходам двухразрядного двоичного счетчика 5, к первому и второму выходам интерферометрического датчика 1 и выходам первого 2 и второго 3 инверторов (соответственно входы 49-52).
В состав дополнительных блоков входят четвертый 38 и пятый 39 аналоговые коммутаторы, первый аналоговый сумматор 40, дополнительный источник 41 положительного напряжения, второй аналоговый сумматор 42, дополнительный источник 43 отрицательного напряжения, третий аналоговый коммутатор 44, Первый вход третьего коммутатора 44 соединен с выходом второго коммутатора 18, выход третьего коммутатора соединен с входом регулятора 22. Второй вход третьего коммутатора 44 соединен с выходом первого сумматора 40, третий вход - с выходом второго сумматора 42. Младший и старший управляющие входы третьего коммутатора 44 подключены к входам 45 и 46 (выходы первого и второго компараторов). Вход 50 (второй выход датчика 1) соединен с первым входом комму-, татора 38 и третьим входом коммутатора 39. Вход 51 (выход инвертора 2) подключен к второму входу коммутатора 38 и четвертому входу коммутатора 39. Вход 52 (выход второго инвертора 3) соединен с третьим входом коммутатора 38 и первым входом коммутатора 39. Вход 49 (первый выход датчика 1) подключен к четвертому входу коммутатора 38 и к второму входу коммутатора 39. Входы 47 и 48 (выходы младшего и старшего разрядов счетчика 5) подключены соответственно к младшему и старшему управляющим входам коммутаторов 38 и 39. Выходы коммутаторов 38 и 39 подключены к вторым входам сумматоров 40 и 42 соответственно, первые входы которых подключены соответственно к выходам дополнительных источников 41 и 43.
Устройство работает следующим образом.
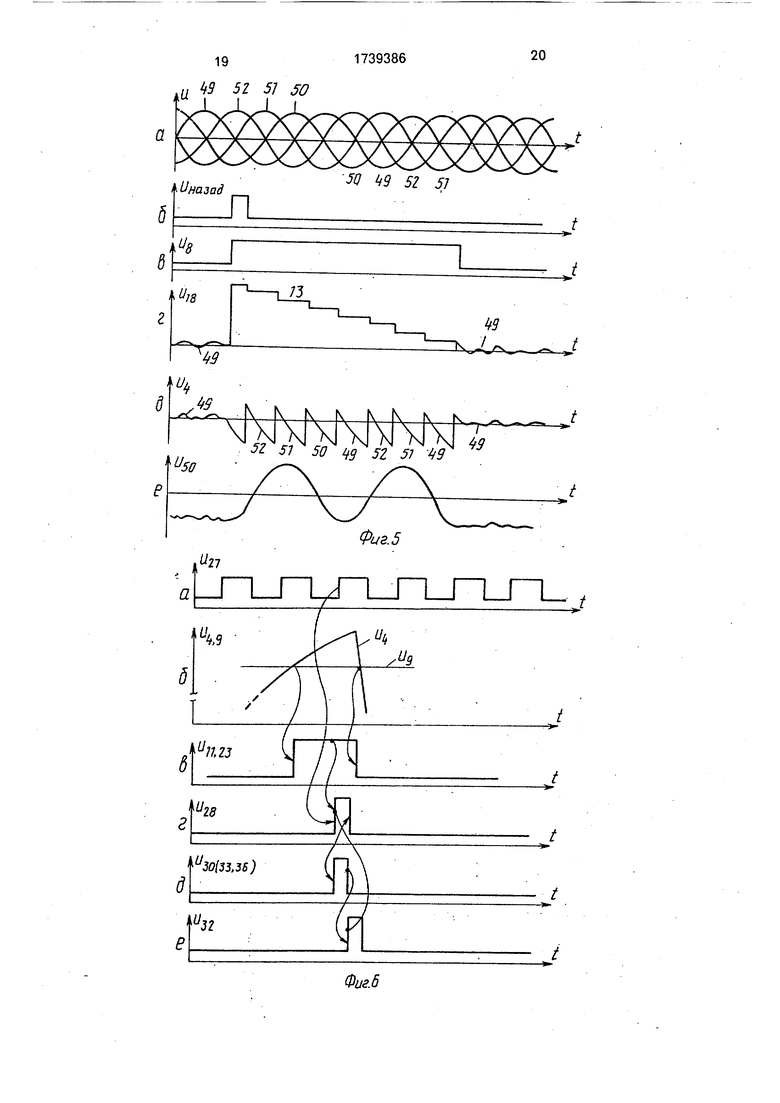
При перемещении каретки, закрепленной на роторе двигателя 17, с выходов интерферометрического датчика 1 перемещения выдаются сдвинутые по фазе на 90 град, синусоидальные напряжения (точки 49 и 50 на фиг. 1 и 3). После инвертирования инверторами 2 и 3 формируются еще два сигнала (точки 51 и 52 на фиг. 1 и 3). Период каждого из сигналов равен Я/2, где А-длина волны оптического излучения интерферометра.
Последовательность указанных сигналов при перемещении вперед (условно вправо) показана на фиг. 4а, при перемещении назад (условно влево) - на фиг. 5а. Каждый
последующий сигнал сдвинут относительно предыдущего на 90 град, или пространственно на расстояние А/8.
В режиме слежения за заданной позицией (заданной считается позиция, достиг0 нутая после очередного перехода, перемещения) счетчик 6 триггеры 7 и 8 находятся в сброшенном состоянии (состоянии логического нуля). . Поэтому нулевой выходной сигнал элемента ИЛИ 15 подклю5 чает к выходу коммутатора 18 его первый вход (выход коммутатора 4). Выходной сигнал коммутатора 4 определяется состоянием счетчика 5, которое, в свою очередь, определяется его состоянием до последнего
0 перехода и количеством пройденных позиций во время этого последнего перехода (сигнал 49 до перехода и сигнал 51 после перехода на фиг. 4г, сигнал 49 до и сигнал 49 после на фиг. 5г). Таким образом, на вы5 ходе коммутатора 4 может быть любой из сигналов 49-52. Этот сигнал через коммутатор 18, регулятор 22, усилитель 21 мощности подается на электрбдвигатель 17. Отклонение каретки от центра позиции (центрам
0 позиций соответствуют нулевые знания сигналов 49-52) вызывает увеличение соответствующего сигнала на входе регулятора 22, что далее приводит к компенсации возникшего отклонения.
5 При переходе на заданное количество позиций вперед или назад это количество в дополнительном двоичном коде задается на шину КОД ПЕРЕМЕЩЕНИЯ (положительное двоичное число при перемещении впе0 ред и отрицательное при перемещении назад). Затем на входную шину ВПЕРЕД или НАЗАД подается короткий импульс (фиг. 46 или 56). Соответствующий триггер (7 или 8) устанавливается в единицу (фиг. 4в
5 или 5е) и разрешает узлу 16 вырабатывать счетные импульсы перемещения вперед или назад, в зависимости от того какой из триггеров установлен в единицу. На выходе элемента ИЛИ 15 появляется логическая
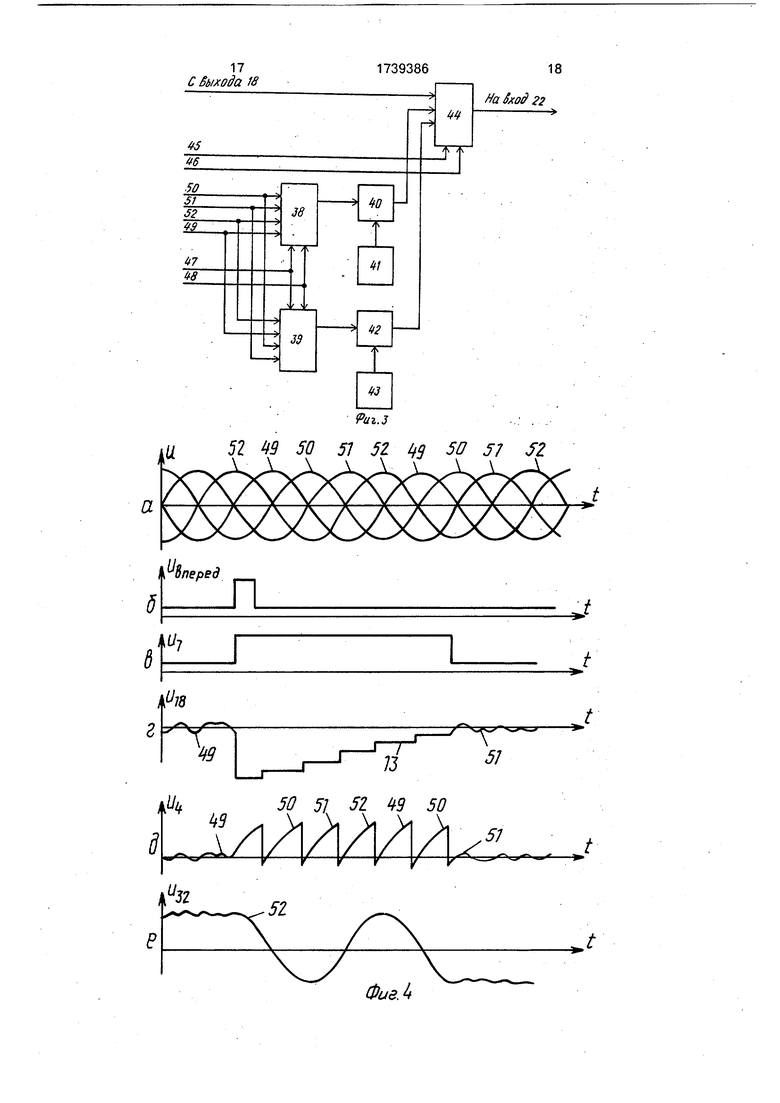
0 единица, которая подключает к выходу коммутатора 18 его второй вход (выход источника 13) и вызывает появление импульса на выходе формирователя 20, Импульс производит занесение кода с внешней ши5 ны в счетчик 6. Сигнал на выходе счетчика 6 вызывает появление на выходе источника 13 (например ЦАП, как видно из временных диаграмм на фиг. 4г и 5г или просто источника постоянного напряжения с управляемой полярностью или источника пилообразного напряжения и т.д.) напряжения, которое с выхода источника 13 через коммутатор 18, регулятор 22, усилитель 21 вызывает движение каретки в нужном напряжении. На фиг. 4 показано перемещение вперед на шесть позиций и на фиг. 5 - назад на восемь позиций. Движение вперед условно осуществляется отрицательным напряжением, назад - положительным.
Начавшееся движение вызывает рост или наоборот уменьшение (в зависимости от направления перемещения) напряжения сигнала на выходе коммутатора 4. При равенстве этого напряжения напряжению на выходе источника 9 (при движении вперед) или источника 10 (при движении назад) происходит срабатывание компараторов 11 или 12. Затем узел 16 вырабатывает соответствующие счетные импульсы, которые вызывают переключение счетчиков 5 и 6. Счетчик 5 поочередно подключает входы коммутатора 4 к его выходу, счетчик 6 подсчитывает количество пройденных позиций. Очередной счетный импульс подключает к выходу коммутатора 4 следующий сигнал (фиг. 4д и 5д), срабатывают коммутаторы 11 или 12, узел 16 и этот процесс повторяется до тех пор, пока на выходе счетчика 6 не образуется нулевое состояние, что свидетельствует о достижении заданной позиции. На выходе узла 14 появляется сигнал, который вызывает срабатывание формирователя 19, импульсом которого, в свою очередь, срабатываются триггеры 7 или 8 (фиг. 4в или 5в). Запрещается выработка счетных импульсов узлов 16 и коммутатор 18 вновь подключает к выходу свой первый вход нулевым управляющим сигналом с выхода элемента ИЛИ 15. Вновь организуется процесс слежения за позицией, достигнутой в результате движения (фигг4д и 5д). Для более детального представления процесса перемещения на фиг. 4е и 5е приведены временные диаграммы сигналов в точках 52 и 50 соответственно.
Узел 16 выделения счетных импульсов работает следующим образом. Генератор 27 вырабатывает импульсы (фиг. 6а), период которых должен быть больше времени переключения коммутатора 4. Этим достигается надежное срабатывание узла 16 один раз при перемещении каретки на одну позицию. Сигнал с выхода компаратора, например 9, как на фиг. 6в, передним фронтом сигнала с генератора 27 заносится в D- триггер, в данном случае 28 (фиг. 6г). На выходе формирователя 3 вырабатывается импульс, который при единичном состоянии входа 24 (режим перемещения) через элемент И 33 поступает на первый выход
узла (фиг. 6д). Импульс с выхода формирователя 30 вызывает появление импульса на выходе формирователя 32 (фиг. бе), который сбрасывает D-триггер, подготавливая его к
очередному циклу работы. Суммарная длительность импульсов формирователей 30 и 32 должна быть меньше периода генератора 27. Для большей наглядности на фиг. 66 показан фрагмент сигналов на выходе ком0 мутатора 4 и источника 9.
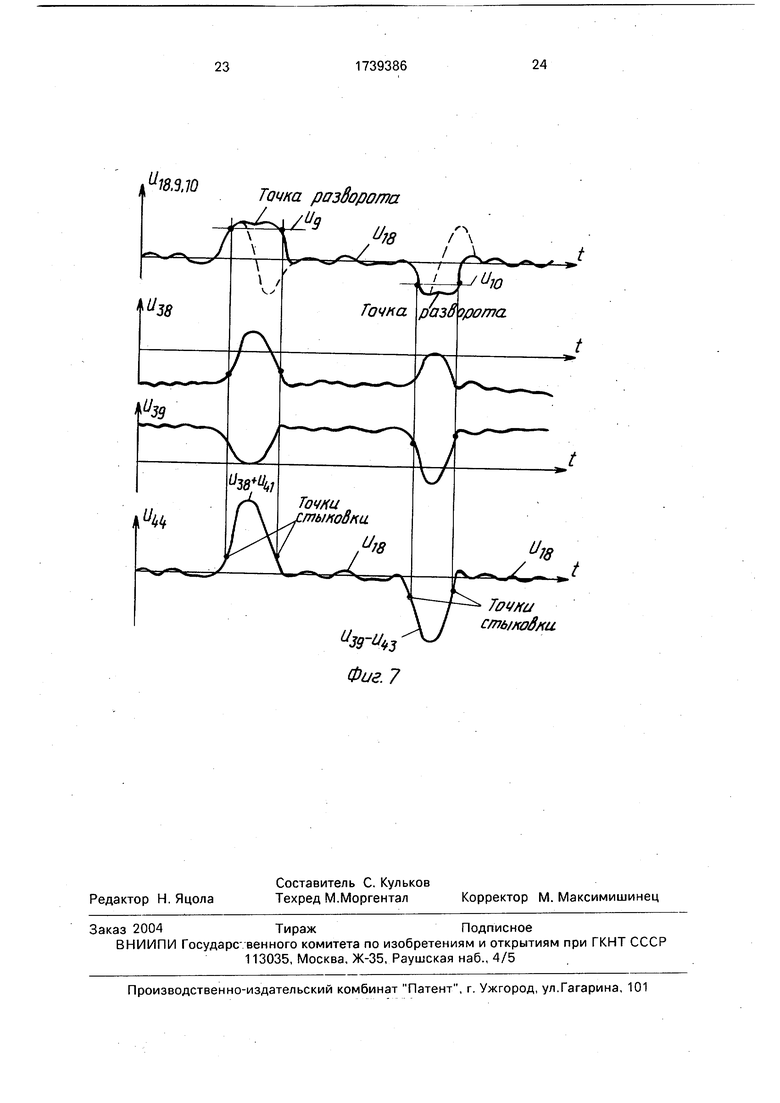
При сильных вибрациях, которые не обрабатываются цепью обратной связи, происходит большое смещение каретки относительно центра позиции. Сигнал с вы5 хода коммутатора 4 (коммутатора 18) выходит за пределы рабочего участка (рабочий полупериод синусоиды) и далее происходит перескок каретки на четыре элементарные позиции, как показано на фиг. 7а штриховы0 ми линиями. Для предотвращения таких ситуаций предназначены дополнительные блоки устройства, которые работают следующим образом. Информационные сигналы 49-52 и управляющие сигналы 47 и 48 под5 аются на входы коммутаторов 38 и 39 таким образом, что на их выходах постоянно присутствуют последующий при движении вправо (на выходе 38, фиг. 76) и последующий при движении влево (на выходе 39, фиг,
0 7в) сигналы по отношению к рабочему сигналу. Рабочим является сигнал на выходе коммутатора 4 (коммутатора 18). При малых смещениях к входу коммутатора 44 подключен первый вход. При сильном смещении
5 каретки амплитуда рабочего сигнала возрастает или убывает в зависимости от направления смещения. Срабатывают компараторы 11 или 12. Сигнал с выхода компаратора подается на соответствующий
0 управляющий вход коммутатора 44. На выходе коммутатора 44 рабочий сигнал заменяется на сумму или разность последующего сигнала с постоянным напряжением, которые вырабатываются на выходах сум5 маторов 40 и 42, Управляющий сигнал имеет при этом гораздо большую амплитуду (фиг. 7г) и компенсирует возникшее отклонение (фиг. 7а). Происходит обратное переключение в коммутаторе 44, на выход подключа0 ется первый вход.
Использование предлагаемого изобретения позволяет значительно упростить устройство по сравнению с известным и расширить его функциональные возможно5 сти, так как устройство не только перемещает позиционер на любое произвольное количество позиций, но и производит слежение за достигнутой позицией. Кроме того, устройство обладает повышенной надежно- стью за счет надежной работы узла выделения счетных импульсов. В условиях сильных вибраций надежность работы устройства повышается путем включения указанных дополнительных блоков.
Формула изобретения 1. Устройство управления позиционером, содержащее первый и второй компараторы, многоразрядный реверсивный счетчик, усилитель мощности, выход которого подключен к входу линейного двигателя, кинематически связанного с кареткой, на которой закреплены головка записи-воспроизведения и подвижная часть интерферо- метрического датчика перемещения, а также неподвижную часть интерферометри- ческого датчика, первый выход которого подключен к первому аналоговому входу первого аналогового коммутатора и входу первого аналогового инвертора, второй выход которого подключен к второму аналоговому входу первого аналогового коммутатора и входу второго аналогового инвертора, а выходы первого и второго аналоговых инверторов соединены соответственно с третьим и четвертым аналоговыми входами первого аналогового коммутатора, отличающееся тем, что, с целью упрощения устройства и расширения его функциональных возможностей, в него введены двухразрядный реверсивный счетчик, первый и второй RS-триггеры, логический элемент ИЛИ, первый и второй формирователи, управляемый источник напряжения, узел выделения нулевого содержимого счетчика, узел выделения счетных импульсов, второй аналоговый коммутатор, источник положительного и источник отрицательного напряжений, регулятор, причем выход первого аналогового коммутатора соединен с первыми входами первого и второго компараторов и первым аналоговым входом второго аналогового коммутатора, вторые входы первого и второго компараторов соединены соответственно с выходами источников положительного и отрицательного напряжений, выходы первого и второго компараторов подключены соответственно к первому и второму входам узла выделения счетных импульсов, первый выход которого подключен к суммирующему входу двухразрядного реверсивного счетчика и к вычитающему входу многоразрядного реверсивного счетчика, а второй выход - к вычитающему входу двухразрядного реверсивного счетчика и к суммирующему входу многоразрядного реверсивного счетчика, младший и старший выходы двухразрядного счетчика подключены соответственно к младшему
и старшему управляющим входам первого аналогового коммутатора, информационные входы многоразрядного реверсивного счетчика соединены с входной шиной КОД
ПЕРЕМЕЩЕНИЯ, выходы счетчика - с входами управляемого источника напряжения и узла выделения нулевого содержимого счетчика, выход управляемого источника напряжения подключен к второму аналогово0 му входу второго аналогового коммутатора, выход узла выделения нулевого содержимого счетчика соединен с входом первого формирователя, выход которого подключен к R-входам первого и второго RS-триггеров,
5 S-входы которых соединены с входными шинами ВПЕРЕД и НАЗАД соответственно, а выходы которых подключены к входам элемента ИЛИ и к третьему и четвертому входам соответственно узла выделения
0 счетных импульсов, выход элемента ИЛИ подключен к управляющему входу второго аналогового коммутатора и к входу второго формирователя, выход которого соединен с входом занесения многоразрядного
5 счетчика, выход второго аналогового коммутатора подключен к входу регулятора, выход которого соединен с входом усилителя мощности,
0 входами узла соответственно, а выходы первого и второго элементов И соединены с первым и вторым выходами узла соответственно, выход генератора соединен с синхронизирующими входами первого и
5 второго D-триггеров, выходы которых подключены к входам первого и второго формирователей соответственно, выходы которых подключены соответственно к вторым входам первого и второго элементов И и к вхо0 дам третьего и четвертого формирователей, выходы которых, в свою очередь, подключены к входам сброса первого и второго D- триггеров соответственно.
татора, первый аналоговый вход четвертого коммутатора соединен с третьим аналоговым входом пятого коммутатора, и с вторым аналоговым входом первого коммутатора, второй аналоговый вход четвертого коммутатора соединен с четвертым аналоговым входом пятого коммутатора и с третьим аналоговым входом первого коммутатора, третий аналоговый вход четвертого коммутатора соединен с первым аналоговым входом пятого коммутатора и с четвертым аналоговым входом первого коммутатора, младший и старший управляющие входы четвертого и пятого коммутаторов соединены соответственно - с младшим и старшим выходами двухразрядного счетчика, младший управляющий вход третьего коммутатора соединен с выходами первого компаратора, а старший управляющий вход - с выходом второго компаратора.
Фиг. 2
«S
#6
50
51
52
38
49
47
У
39
U
52 ИВ 50 51 52 Щ 50 J7 S2
На бход 22
JT
Фие.Ъ
a W 51 51 50
k- Uна зад
6
п
д
№
д
Ь9
1%
Т7 е- ч N г-г, N N
5Z 51 50 its 52 51 49
V/
Фиг. 5
W W 52 51
Т
Точка раздорота
U-U9..
t
Тячни
СЛ7Ь/КодхЦ.
| Устройство управления приводом каретки магнитного накопителя | 1984 |
|
SU1267479A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1987 |
|
SU1446653A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
