О
о
СО
D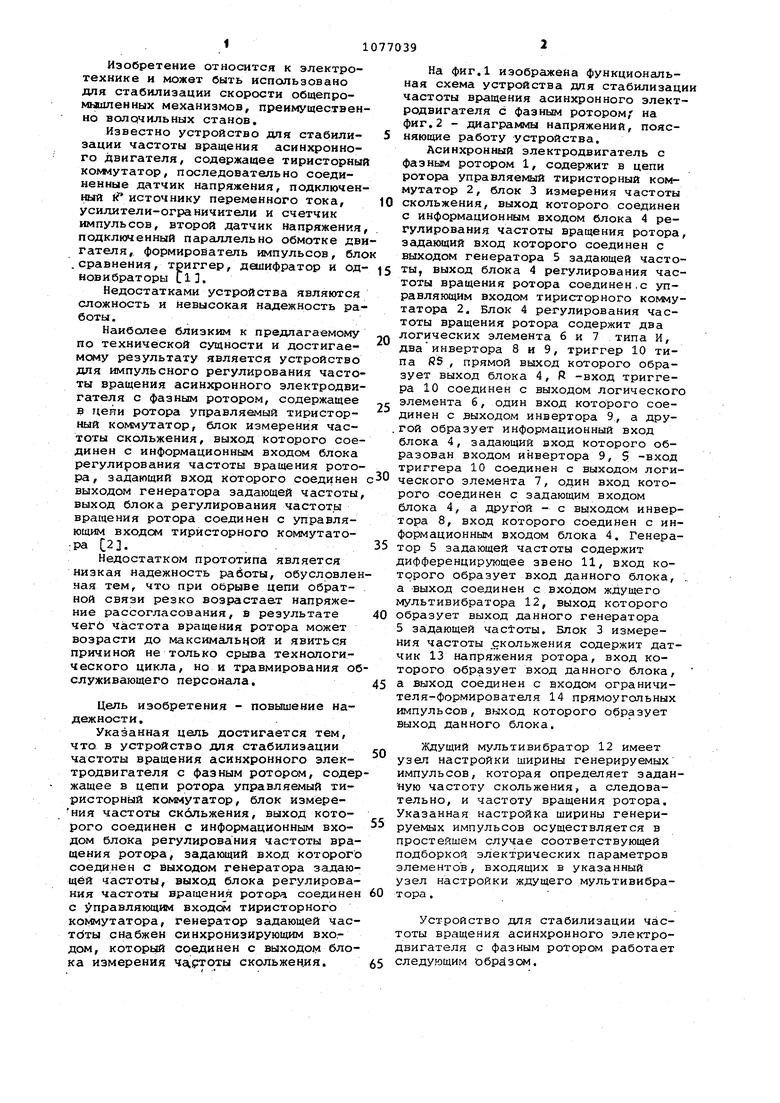
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1328918A1 |
| Асинхронный электропривод | 1985 |
|
SU1305819A1 |
| Асинхронный электропривод | 1989 |
|
SU1753576A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1339858A1 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1343534A1 |
| Устройство для регулирования натяжения проволоки при намотке | 1980 |
|
SU900920A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2566740C1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Способ импульсного управления асинхронным электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1987 |
|
SU1539949A1 |
УСТРОЙСТЮ ДЛЯ СТАБИЛИЗАЦИИ СТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ, содержащее в цепи ротора управляемый тиг ристорный коммутатор, блок измерения частоты скольжения, выход которого соединен с информационным входом блока регулирования частоты вращения, ротора, задгиощий вход которого соединен с выходом генерат( задакхцей частоты, шаход Олока регулирования частоты вращения ротора соединен с управляющим входом тиристорного коммутатора, о.тличаюцееся тем, что, с целью повышения надежности, генератор задающей частот снабжен синзфонизирующим вхоД(Я4, который соединен с выходом блока измерения частоты скольжения.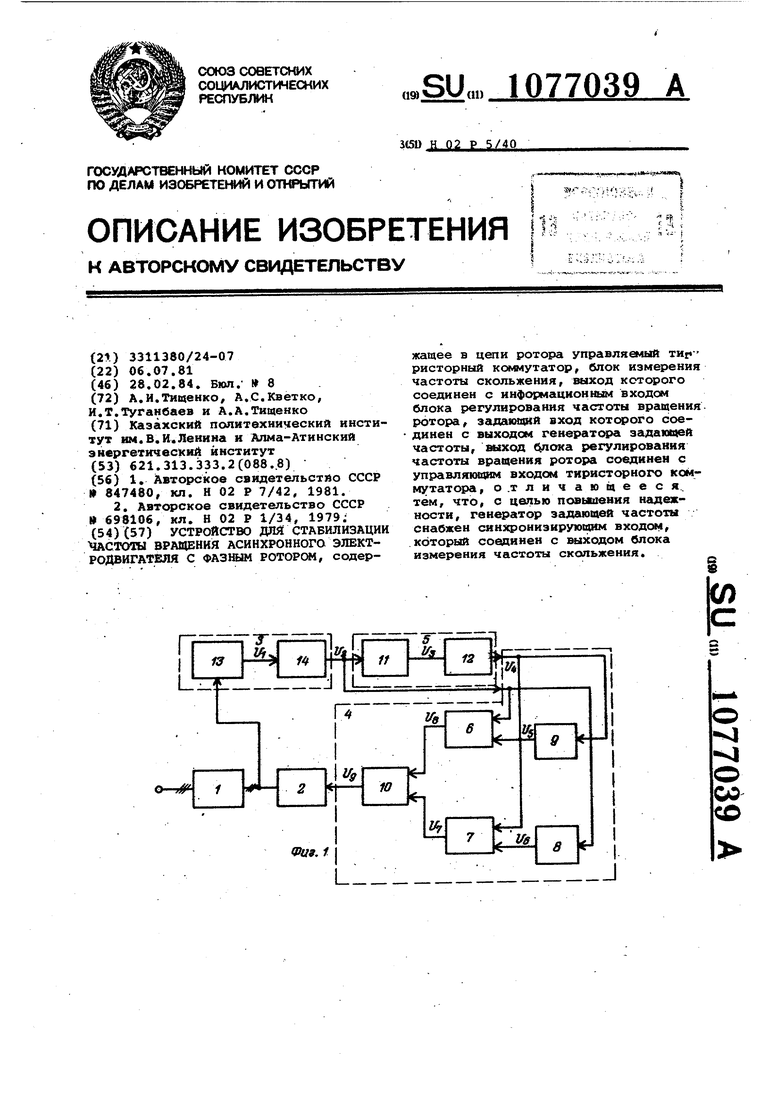
::I Изобретение относится к электротехнике и может быть использовано для стабилизации скорости общепромышленных механизмов, преимуществен но волочильных станов. Известно устройство для стабилизации частоты вращения асинхронного двигателя, содержащее тиристорны KONMyTaTop, последовательно соединенные датчик напряжения, подключен ный |Г источнику переменного тока, усилители-ограничители и счетчик импульсов, второй датчик напряжения подключенный параллельно обмотке дв гателя, формирователь импульсов, бл .сравнения, триггер, дешифратор и од новибраторы 11. Недостатками устройства являются сложность и невысокая надежность ра боты. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для импульсного регулирования часто ты вращения асинхронного электродви гателя с фазным ротором, содержащее в цени ротора управляемый тиристорный коммутатор, блок измерения частоты скольжения, выход которого соединен с информационным входом блока регулирования частоты вращения ротора, задающий вход которого соединен выходом генератора задающей частоты выход блока регулирования частоты вращения ротора соединен с управляющим входом тирйсторного коммутато:Ра С2. Недостатком прототипа является низкая надежность работы, обусловлен ная тем, что при Обрыве цепи обратной связи резко возрастает напряжение рассогласования, в результате чегй частота вращения ротора может возрасти до максимальной и явиться причиной не только срыва технологического цикла, но и травмирования об служивающего персонала, Цель изобретения - повышение надежности. Указанная цель достигается тем, что в устройство для стабилизации частоты вращения асинхронного электродвигателя с фазным ротором, содер жащее в цепи ротора управляемый тиристорный коммутатор, блок измерения частоты скольжения, выход которого соединен с информационным входом блока регулирования частоты вращения ротора, задающий вход которого соединен с выходом генератора задающей частоты, выход блока регулирования частоты вращения ротора соединен с Управляющим входам тирйсторного коммутатора, генератор задающей частЬты снабжен синхронизирующим вхо.дом, который соединен с выходом блока измерения чд,етоты скольжения. На фиг.1 изображена функциональная схема устройства для стабилизации частоты вращения асинхронного электродвигателя с фазным ротором, на фиг,2 - диаграммы напряжений, поясняющие работу устройства. Асинхронный электродвигатель с фазным ротором 1, содержит в цепи ротора управляемый тиристорный коммутатор 2, блок 3 измерения частоты скольжения, выход которого соединен с информационным входом блока 4 регулирования частоты вращения ротора, задающий вход которого соединен с выходом генератора 5 задающей частоты, выход блока 4 регулирования частоты вращения ротора соединен,с управляющим входом тирйсторного KOiVMyтатора 2. Блок 4 регулирования частоты вращения ротора содержит два логических элемента б и 7 типа И, дваинвертора 8 и 9, триггер 10 типа Й5 , прямой выход которого образует выход блока 4, R -вход триггера 10 соединен с выходом логического элемента 6, один вход которого соединен с выходом инвертора 9, а другой образует информационный вход блока 4, задающий вход которого образован входом инвертора 9, 5 -вход триггера 10 соединен с выходом логического элемента 7, один вход которого соединен с задающим входом блока 4, а другой - с выходом инвертора 8, вход которого соединен с информационным входом блока 4, Генератор 5 задающей частоты содержит дифференцирующее звено 11, вход которого образует вход данного блока, , а выход соединен с входом ждущего мультивибратора 12, выход которого образует выход данного генератора 5 задающей частоты. Блок 3 измерения частоты скольжения содержит датчик 13 напряжения ротора, вход которого образует вход данного блока, а выход соединен с входом ограничителя-формирователя 14 прямоугольных импульсов, выход которого образует выход данного блока. Ждущий мультивибратор 12 имеет узел настройки ширины генерируемых импульсов, которая определяет заданную частоту скольжения, а следовательно, и частоту вращения ротора. Указанная настройка ширины генерируемых импульсов осуществляется в простейшем случае соответствующей подборкой электрических параметров элементов, входящих в указанный узел настройки ждущего мультивибратора .. Устройство для стабилизации частоты вращения асинхронного электродвигателя с фазным ротором работает следующим образом.
Асинхронный электродвигатель 1 подключают к сети и разгоняют до заданной частоты вращения ротора. Напряжение Ц роторной цепи поступает на вход блока 3 измерения частоты скольжения, в котором через датчик 13 напряжения ротора оно подается в ограничитель-формирователь 14 прямоугольных импульсов, в результате чего образуется последовательность прямоугольных импульсов
1/2 , ширина которых равна половине периода напряжения (J , имеющего частоту скольжения ротора. Последовательность прямоугольных импульсов
U проступает через дифференцирующее звено 11 на запускающий вход ждущего мультивибратора 12, который запускается передним фронтом каждого из пришедших импульсов и вырабатывает На своем выходе импульсы U , заданной ширины, настройка которой достигается выбором соотношения параметров узла настройки ждущего мультивибратора. Ширина импульсов 0 является заданием частоты вращения ротора, так как разность хода задних
фронтов импульсов и являющая-ся результатом их сравнения, подается в виде управляющих импульсов U-, и Ug на соответствующие входы триггера 10, который удерживается в определенном положении до тех пор, пока система регулирования не отработает возникшее рассогласование по частоте вращения ротора, которое устраняется в результате подачи управляющего на0пряжения fj на управляющий вход тиристорного коммутатора.в течение заданного времени. При обрыве или от- казе цепи обратной связи между цепью ротора и блоком 3 исчезают синхрони5 зирующие импульсы на входе генератора задающей частоты, в результате чего исключается возможность подачи управляющих импульсов на управляемый тиристорный коммутатор и двигатель переводится на минимальную частоту
0 вращения вплоть до нулевой.
Таким образом, предлагаемое устройство позволяет существенно повысить надежность работы электропривода .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод переменного тока | 1979 |
|
SU847480A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU698106A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
