Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах с асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой.
Цель изобретения - повышение надежности двигателя и экономичности за счет ограничения максимально допустимой по нагреву асинхронного электродвигателя частоты вращения в нижней части диапазона регулирования, а также упрощение, повышение надежности и экономичности устройства.
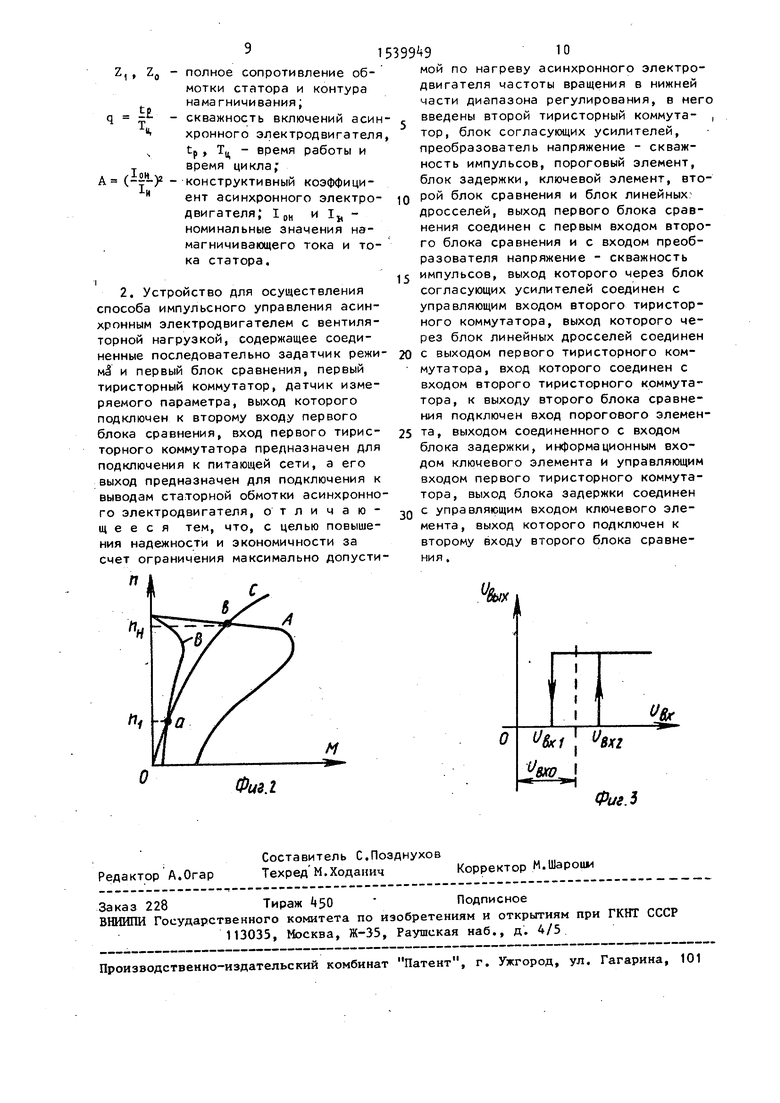
На фиг.1 представлена функциональная схема устройства для осуще™ ствления способа импульсного управления асинхронным электродвигателем на фиг.2 - механическая характеристика электродвигателя и характеристика нагрузки; на фиг.З характеристика порогового элемента.
Устройство для осуществления предлагаемого способа управления содержит (фиг.1) задатчик 1 режима, первый и второй блоки 2 и 3 сравнения, первый и второй тиристорные коммутаторы k и 5, датчик 6 измеряемого параметра, блок 7 согласующих усил.и- телей, преобразователь 8 напряжение- скважность импульсов,, пороговый элемент 9, блок 10 задержки, ключевой элемент. 11 и блок 12 линейных дросселей. Входы первого и второго тиристорных коммутаторов k w 5 объе- i
динены и предназначены для подключения к питающей сети, выходы первого тиристорного коммутатора k и бло ка 12 линейных дросселей объединены и предназначены для подключения к . выводам статорной обмотки асинхронного электродвигателя 13 с вентиляторной нагрузкой И на валу. Входы блока 12 линейных дросселей соединены с выходами второго тиристорного коммутатора 5, управляющий вход которого через последовательно соединенные блок 7 согласующих усилителей и преобразователь 8 напряжение скважность импульсов соединен с выходом первого блока 2 сравнения и первым входом второго блока 3 сравнения. Первый и второй входы первого блока 2 сравнения соединены с выхо5 дами соответственно задатчика 1 ре- жима и датчика 6 измеряемого параметра, вход которого соединен с объ ектом 15 регулирования. Выход второго блока 3 сравнения через порогеQ вый элемент 9 соединен с управляющими входом первого тиристорного коммутатора Ч, входом блока 10 задержки и информационным входом ключевого элемента 11, управляющий вход
5 которого соединен с выходом блока 10 задержки, а выход - с вторым входом второго блока 3 сравнения.
Сущность способа импульсного управления асинхронным электродвига
телем с вентиляторной нагрузкой состоит в том, что электродвигатель с минимально допустимой частотой, определяемой требованиям объекта регулирования к колебаниям частоты вращения, подключают на пониженное синусоидальное напряжение, соответствующее номинальному тепловому состоянию асинхронного электродвигателя при повышенном его скольжении, а регулирование частоты вращения осуществляют за счет изменения скважности подключений электродвигателя на указанное пониженное напряжение, которое выбирают из выражения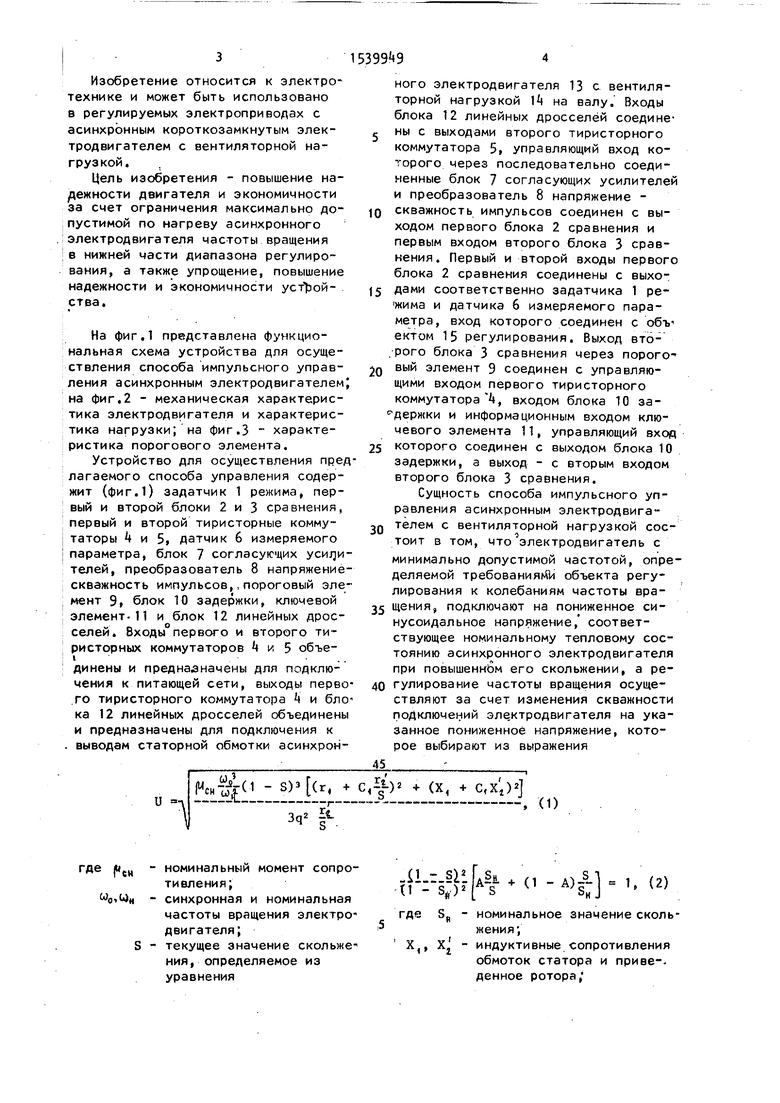
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Устройство для управления асинхронным мотор-вентилятором | 1982 |
|
SU1102072A1 |
| Устройство для экстремального управления асинхронным электродвигателем | 1988 |
|
SU1653111A1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1100704A1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2035839C1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1037402A1 |
| Устройство для регулирования частоты вращения короткозамкнутого асинхронного электродвигателя | 1990 |
|
SU1739468A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Электропривод | 1983 |
|
SU1220101A1 |
Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах с асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой. Целью изобретения является повышение надежности двигателя и экономичности за счет ограничения максимально допустимой по нагреву асинхронного двигателя частоты вращения в нижней части диапазона регулирования. Устройство для осуществления способа содержит задатчик 1 режима, блоки 2,3 сравнения, тиристорные коммутаторы 4,5, датчик 6 измеряемого параметра, блок 7 согласующих усилителей, преобразователь "Напряжение-скважность импульсов" 8, пороговый элемент 9, блок 10 задержки, ключевой элемент 11, блок 12 линейных дросселей. Электродвигатель 13 с вентиляторной нагрузкой 14 на валу с минимально допустимой частотой, определяемой требованиями объекта 15 регулирования к колебаниям частоты вращения, подключают на пониженное синусоидальное напряжение, соответствующее номинальному состоянию электродвигателя при повышенном его скольжении, а регулирование частоты вращения осуществляют за счет изменения скважности подключений двигателя на указанное пониженное напряжение. 2 с.п.ф-лы, 3 ил.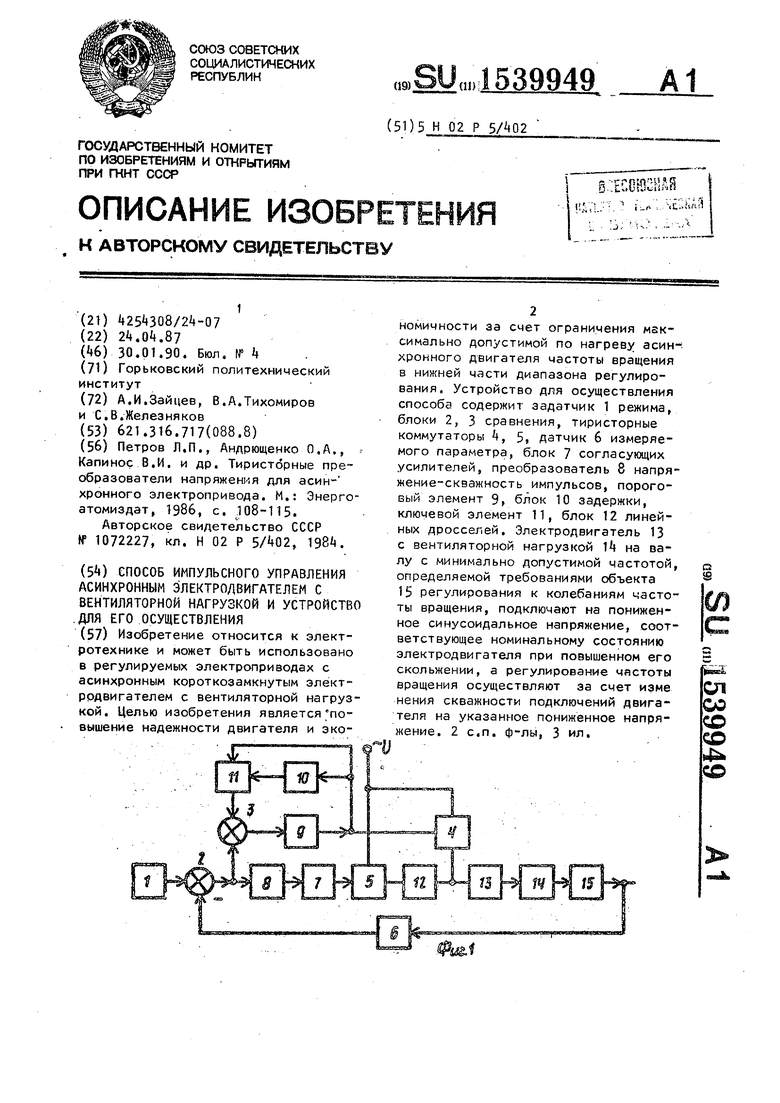
- номинальный момент сопротивления;
- синхронная и номинальная частоты вращения электродвигателя;
- текущее значение скольжения, определяемое из уравнения
,11.:... О «Ј.,. (2,
где 5„ - номинальное значение скольжения;
X,, х - индуктивные сопротивления обмоток статора и приве-. денное ротора,
ci-1+r«
1 Ьо
Z(, Z0 - полное сопротивление обмотки статора и контура намагничивания;
to q -u - скважность включения,1
tp , Тц - время работы и
время цикла; А С™1)2- конструктивный коэффицин ент электродвигателя; 1 и I - номинальные значения намагничивающего тока и тока статора.
Устройство для осуществления пред латаемого способа работает следующим образом.
На входы первого блока 2 сравнения поступают сигналы с задатчика 1 режима и с датчика 6 измеряемого параметра, и на выходе первого блока 2 сравнения вырабатывается сигнал
рассогласования IL . При U и„„ /. - в ьх °Х2 (фиг.З) данный сигнал, поступая на
вход преобразователя 8 напряжение - скважность импульсов, определяет режим его работы, а преобразователь 8, в свою очередь, через соединенные последовательно блок 7 согласующих усилителей, второй тиристорный коммутатор 5 и блок 12 линейных дросселей задает среднюю частоту вращения электродвигателя 13, вентиляторной нагрузки И и, соответственно, температуру объекта 15 регулирования.
При значительном отклонении (превышении) сигнала с выхода датчика 6 измеряемого параметра, заданного за- датчиком 1 значения, сигнал и.., Unv,
,.Of-DA.2,
(фиг.З) формирует сигнал на выходе второго блока 3 рассогласования, что вызывает появление сигнала с высоким уровнем на выходе порогового элемента 9.
Данный сигнал поступает на управляющий вход первого тиристорного коммутатора 4, который, включаясь, подключает электродвигатель 13 на полное напряжение сети Частота вращения электродвигателя 13 и вентиляторной нагрузки Ц резко увеличивается, а температура объекта 15 регулирования понижается. Одновременно выходной сигнал высокого уровня с порогового элемента Э поступает на вход блока 10 задержки и через ключевой элемент 11 на второй
399 - 9
вход второго блока 3 сравнения. Таким образом осуществляется блокировка порогового элемента 9 на время, заданное блоком 10 задержки, т.е. обеспечивается вращение электродвигателя 13 с номинальной частотой вращения в течение заданного времени. Время задержки устанавли- , вается таким, чтобы исключить пуски электродвигателя на номинальное напряжение питания с частотой, превышающей приведенную в паспорте данного электродвигателя, ., Через время, заданное блоком 10 задержки, ключевой элемент 11 выключается и отключает второй вход второго блока 3 сравнения, сигнал на выходе которого теперь определя- 2о ется только сигналом на его первом входе. Когда сигнал на выходе первого блока 2 сравнения достигнет значения и6„ U&x (фиг.З), пороговый элемент 9 отключает первый ти- 25 ристорный коммутатор А и частота вращения электродвигателя 13 определяется преобразователем 8 напряжение - скважность импульсов. Если после срабатывания блока 10 задержал ки U ., U.y. , то электродвигатель
JU « 0 Ь J °
13 продолжает вращаться с номинальной частотой.
Частота вращения электродвигателя 13 вместе с жестко посаженной на его вал вентиляторной нагрузкой 14
35 регулируется в пределах от 0 до п, (фиг.2). Кривые А и В - естественная и искусственная механические характеристики электродвигателя 13 кривая С - характеристика вентиля- торной нагрузки 14. Точка а определяется как пересечение искусственной механической характеристики электродвигателя 13, полученной при пониженном значении синусоидального нап4- ряжения на зажимах статора, соответ ствующей номинальному тепловому состоянию электродвигателя 13, и характеристики вентиляторной нагрузки 14, Точка b соответствует номинальному
50 режиму работы.
Для формирования указанного пониженного синусоидального напряжения на зажимах статора электродвигателя 55 использован блок 12 линейных дросселей переменного тока, которые ограничивают значение синусоидального напряжения, а следовательно, и частоты вращения на заданном уровне,
соответствующем номинальному состоя нию электродвигателя 13, что надежно защищает его от возможного пере- рева-при повышенном скольжении, исключает высшие гармоники питающего тока, существенно уменьшает пусковые токи и ограничивает значение ударного тока в момент пуска, т.е. линейные дроссели переменного тока позволяют повысить надежность, долговечность и экономичность устройства .
Частота подключений электродвигателя 13 на пониженное синусоидальное напряжение, задаваемая преобразователем 8 напряжение - скважность импульсов, постоянна и определяется предельными требованиями объекта 1 5- регулирования к колебаниям частоты вращения вентиляторной нагрузки 14. В случае, когда объектом 15 регулирования является охлаждаемая жидкость , а контролируемым параметром - ее температура, частота вращения может колебаться в значительных пределах вследствие большой постоянной времени нагрева жидкое Следовательно, частота включения электродвигателя 13 чрезвычайно мала и измеряется сотыми и даже тысячными долями герц как из-за указанной большой постоянной времени нагрева жидкости, так и вследствие значительных маховых масс вентиляторной нагрузки 14. Таким образом, в процессе регулирования согласно предлагаемому способу электродвигатель 13 оказывается либо включенным на длительное время на пониженное синусоидальное напряжение, не допускающее его нагрева выше номинального, либо отключенным и работает на
выбеге.
т
де
|Чсн номинальный момент сопротивления;50
, гг - сопротивление обмотки статора и приведенное сопротивление ротора; синхронная и номинальная частоты вращения электро- 55 двигателя,
текущее значение скольжения, определяемое из уравнения
Ц,0Н s 15399 98
тТаким образом, способ импульсного управления асинхронным электро
5
0
5
0
5
0
5
двигателем с вентиляторной нагрузкой и устройство для его осуществления позволяют повысить надежность электродвигателя, экономичность и упростить электропривод за счет ограничения максимально допустимой по нагреву электродвигателя частоты вращения в нижней части диапазона регулирования, что достигается путем осуществления ШИН регулирования напря- жения, причем значение напряжения, подаваемого на электродвигатель, выбирается из условия обеспечения требуемого теплового состояния электродвигателя.
Формула изобретения
.il-z-siifsa. + (1 A)si t (1 - sH)4As + u A;sHJ
Su номинальное значение сколь женияJ Х4 - индуктивные сопротивления
обмоток статора и приве- „ денное ротора;
+Й
П,
м
| Петров Л.П., Андрющенко О.А,, Капинос В.И | |||
| и др | |||
| Тиристбрные преобразователи напряжения для асин- хронного электропривода | |||
| М.: Энерго- атомиздат, 1986, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Способ импульсного регулирования частоты вращения асинхронного электропривода | 1982 |
|
SU1072227A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
