,., ремещают опорную сеть вместе с объектом, образуют кваэиснимки под условием относительности движения съемочной камеры к объекту съемки, ; определяют элементы внешнего ориентирования каждого квазиснимка и находят по элементам вне1инего ориентирования параметры движения.
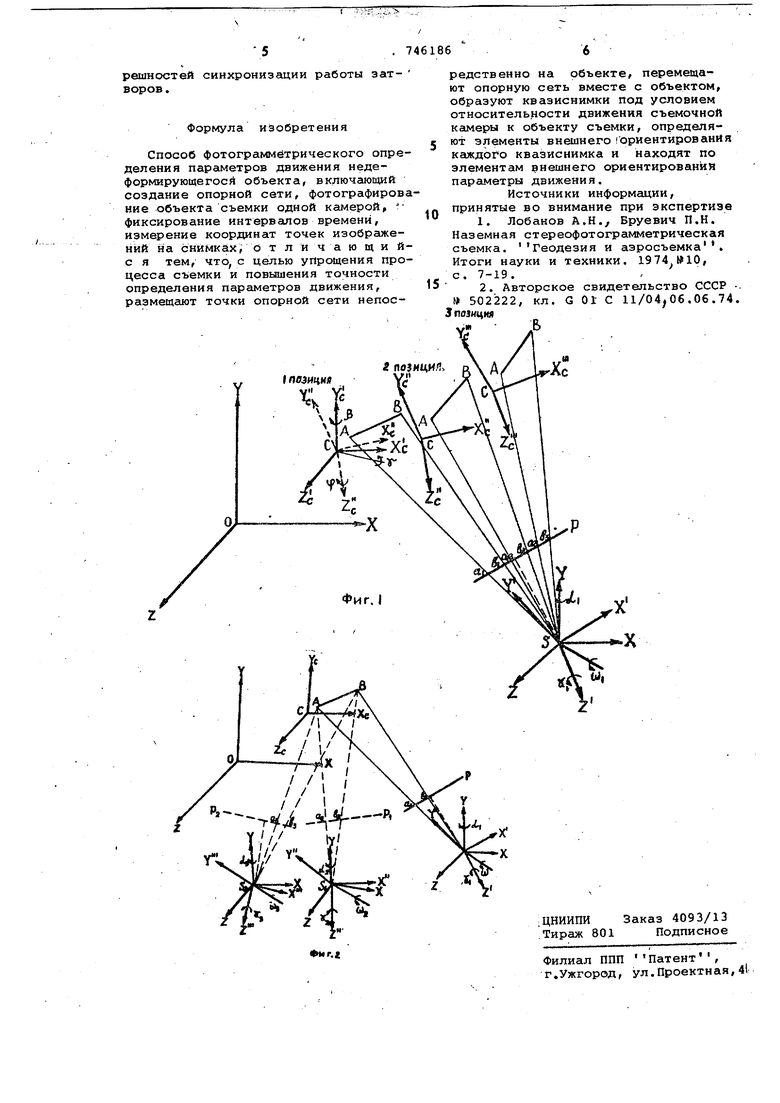
На фиг. 1 показана прийципиальная схема получения изображений движения объекта на один снимок на фиг, 2 - схема получения квазиконгерентйых снимков i
На поверхности твердого тела замаркирован ряд точек (фиг, 1 и 2 точки А и В), координаты которых до начала движения определяют геодезическим методом в неподвижной (инерциальной) системе координат Худ С телом связана система координат ,-, начало которой в зависимости от условий эксперимента может быть совмещено с полюсом вращения тела С , центром тяжести, центром масс или любой другой точкой, а оси могут быть направлены по строительным осям конструкции. Координаты опорных точек А и В объекта - занимающего в пространстве 1,.2,и 3 и т.д. позиций, в системе координат x y z остаются неизменными. Взаимно положение систем координат и X у Z определяются углами А /v к (фиг. 1) .
Опорные точки А и В объекта на разные зафиксированные моменты времени через объектив S проектируют в плоскость снимка Р в виде точек а Ь,, J, а j bgp .. и т.д. По измеренным координатам на снимке Р точек геодезическим коорди 1атам точек А и В объекта в позиции 2 образуют мнимый снимок Р , полученный из мнимого центра S-j (фиг,2) Такой снимок можйо получить путем возвращения объекта из позиции 2 в позицию 1, не нарушая связи проектирующих лучей. Аналогичным путем образуют следующий квазиснимок и т.д. Если объект займет N положений в пространстве и столько же получит изображений на снимке Р , то можно получить (N-1) мнимых снимков (квазяснимков) .
.Таким образом, используя принцип .относительности движения, т.е. считая, что перемещается не тело, а центр проекции S , получают мнимые центры проекций Sj, ,3,,., ,,3г,(фиг.2) .
Так как положение квазиснимков зависит от положения тел для зафиксированных моментов времени, то элементы ьнешнёго ориентирования v . ЭТИХ снимков э-ависят от параметров движения. Следовательно, определив ШЙШ 1Г йШЙ1ё1 е арГёнтй; ШШШ1Г -- квазиснимков, можно затем перейти кэлёментгил параметров движения.
Угловые элементы внешнего ориентирования квазиснимков находят путем их калибровки. Тогда углы поворота между двумя позициями тела
Р, -...,
.,UJ
.
где i - номер позиции тела, ч, - угловые элементы внешнего 10 ориентирования квазиснимков,Угловые скорости, отнесенные к осям поворота, соответственно составляют
.
.
/i.-ll.Д ;
..
20 Проекции общей угловой скорости на оси подвижной системы ,равны.
LO « соэ if Ь со S ,v &1П If; UJy /jj-s n 25uu - Cf & o,n ff.
Линейное перемещение тела (полюса вращения) при переходе из одной позиции в другуЬ (фиг.1) равно
л.
&v.
z,
где л Х-| ,АУ, ,iZ-, - линейное перемещение тела (полюса вращения) из позиции 1 в позицию(i+1);
%, f.vfZgi -координаты центров проекций квазиснимков;
- координаты полюса вращения в первой позиции тела;
А; - матрица направляющих косинусов для углов поворота тела из i в пЬзицию (i-«-l) .
Зная перемещения полюса вращения тела, получают линейные скорости за временной интервал at.
Способ осуществляют при стробоскопической съемке или съемке на отдельные кадры неподвижной камерой движущихся твердых (недеформирующихся) объектов, совершающих поступатеЛьное и вращательное движение.
Изобретение позволяет уверенно определять параметры движения не-
деформирующегося объекта при помощи съемки одной камерой.
Использование способа фотограмметрического определения параметров движения недеформирующегося объекта
обеспечивает возможность получения параметров движения с помощью одной съемочной камеры без использования дополнительных зеркал; повышение точности получения параметров движения за счет исключения пог
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фотограмметрического определения кинематических параметров недеформирующегося объекта | 1982 |
|
SU1080015A1 |
| Способ фотограмметрической калибровки камеры при съемке недеформирующихся подвижных объектов | 1977 |
|
SU637710A1 |
| Способ определения средней квадратической ошибки пространственных координат точек исследуемого объекта из обработки изображений, полученных разными съемочными камерами с произвольными значениями элементов ориентирования | 2019 |
|
RU2714525C1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ФОТОГРАФИРУЕМЫХ С КОСМИЧЕСКОГО АППАРАТА ЗЕМНЫХ ОБЪЕКТОВ | 2014 |
|
RU2587539C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ С КОСМИЧЕСКОГО АППАРАТА КООРДИНАТ ИСТОЧНИКА КОЛЬЦЕВЫХ ВОЛН НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| Способ определения угловых элементов внешнего ориентирования снимка | 2019 |
|
RU2704540C1 |
| Съемочная камера для получения ренгеновских снимков объектов | 1978 |
|
SU744230A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
