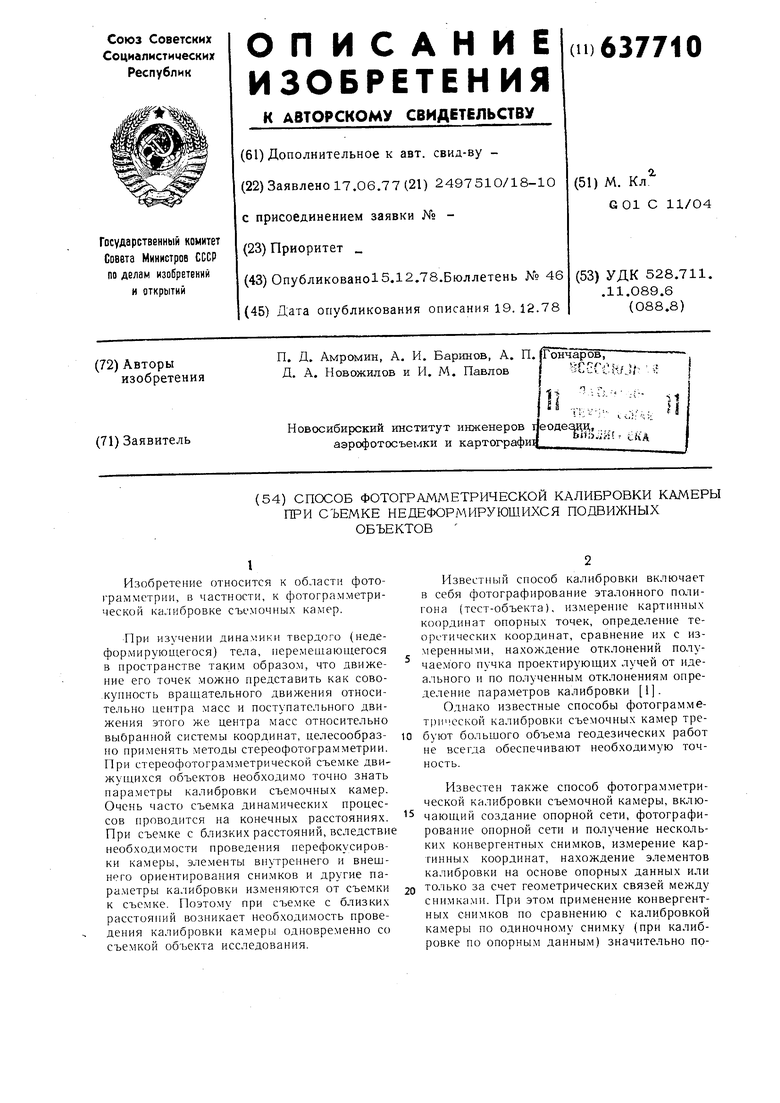
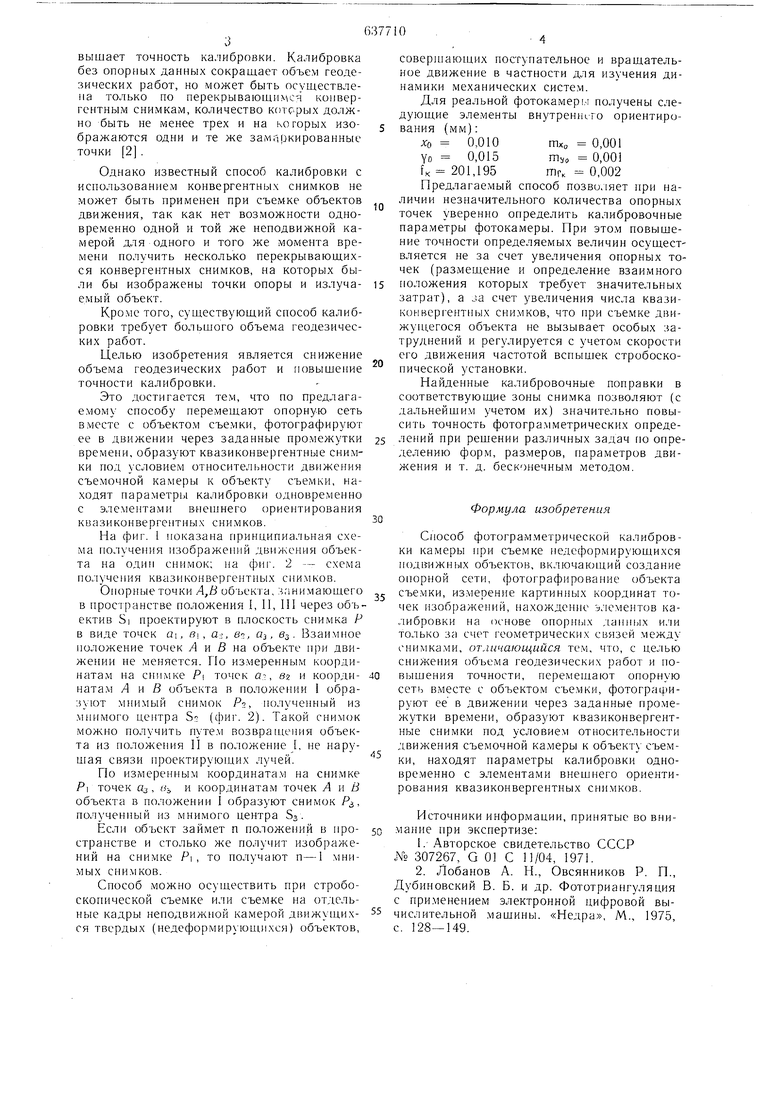
вышает точность калибровки. Калибровка без опорных данных сокращает объем геодезических работ, но может быть осуществлена только по перекрывающимся конвергентным снимкам, количество которых должно быть не менее трех и на когорых изображаются одни и те же зам;1ркированные точки 2. Однако известный способ калибровки с использованием конвергентных снимков не может быть применен при съемке объектов движения, так как нет возможности одновременно одной и той же неподвижной камерой для одного и того же момента времени получить несколько перекрывающихся конвергентных снимков, на которых были бы изображены точки опоры и излучаемый объект. Кроме того, существующий способ калибровки требует больщого объема геодезических работ. Целью изобретения является снижение объема геодезических работ и повыщение точности калибровки. Это достигается тем, что по предлагаемому способу перемещают опорную сеть в.месте с объектом съемки, фотографируют ее в движении через заданные промежутки времени, образуют квазиконвергентные снимки под условием относительности движения съемочной камерь к объекту съемки, находят параметры калибровки одновременно с элементами внеп1него ориентирования квазиконвергентиых снимков. На фиг. 1 показана принципиальная схема получения изображений движения объекта на один снимок; на фи1 2 - схема получепия квазнконвергентных снимков. DnopHtjie точки А,В объек1 а, .чани.мающего в пространстве положения I, И, III через объектив Si проектируют в плоскость снимка Р в виде точек а:, в:, а/г, в, а, в. Взаимное положение точек Л и В на объекте при движении не .меняется. По из.меренным координатам на снимке Pi точек а, вг и координатам /1 и В объекта в положении 1 образуют мнимый снимок РЗ, получе1П1ый из мнимого центра S; (фиг. 2). Такой снимок можно получить путе.м возвращения объекта из положения II в положение , не нарушая связи проектирующих лучей. По измеренным координатам на снимке Р точек Oj, % и координатам точек А и В объекта в положении I образуют снимок РЗ полученный из мнимого центра S. Если объект займет п положений в пространстве и столько же получит изображений на снимке Р , то получают п-1 мни.мых сни.мков. Способ можно осуществить при стробоскопической съемке или съемке на отдельные кадры неподвижной камерой Д ижуп1.ихся твердых (недеформирующихся) объектов. совершающих поступательное и вращательное движеиие в частности для изучения динамики механических систе.м. Для реальной фотокамеры получены следующие элементы внутреннего ориентирования (мм): хо 0,010шхо 0,001 YO 0,015т, 0,001 Гк 201,195тгк 0,002 Предлагаемый способ позволяет при наличии незначительного количества опорных точек уверенно определить калибровочные параметры фотокамеры. При это.м повыщение точности определяемых величин осуществляется не за счет увеличения опорных точек (размещение и определение взаи.много положения которых требует значительных затрат), а ja счет увеличения числа квазиконвергентных снимков, что нри съемке движущегося объекта не вызывает особых затруднений и регулируется с учетом скорости его движения частотой вспышек стробоскопической установки. Найденные калибровочные поправки в соответствующие зоны снимка позволяют (с дальнейщим учетом их) значительно повысить точность фотограмметрических определений при рещении различных задач по определению форм, размеров, параметров движения и т. д. бесконечным методом. Формула изобретения Способ фотограм.метрической калибровки камеры при съемке педеформирующихся подйижпых объектов, включающий создание опорной сети, ()отографирование объекта съемки, измерение картинщ ьх координат точек изображений, нахождение элементов ка.шбровки на основе onopHfjix ланн1,1х или только за счет геометрических связей между снимка.ми, отличающийся те.м, что, с целью снижения объема геодезических работ и новыщения точности, перемец.1ают опорную сеть вместе с объектом съемки, фотографируют ее в движении через заданные промежутки времени, образуют квазиконвергентные снимки под условием относительности движения съемочной камеры к объектч съемки, находят параметры калибровки одновременно с элементами внешнего ориентирования квазиконвергентных сни.мков. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР 307267, G 01 С 11/04, 1971. 2.Лобанов А. Н., Овсянников Р. П., убиновский В. Б. и др. Фототриангуляция применением электронной цифровой выислительной машины. «Недра, М., 1975 . 128-149.