2. Устройство для управления тиристорным преобразователэм, работающим на активно-индуктивную нагрузку и противоЭДС, содержатее.синхронизатор с напряжением сети, формирователь сигналов управления, распределитель сигналов управления, отличающееся тем, что, с целью повышения точности и надежности,оно снабжено генератором внутриинтервального угла, счетчиком внутриинтервального угла, сумматором, задатчиком тока, счетчиком сигналов управления, дешифратором начального угла, селектором номеров рабочих тиристоров, причем потенциальный выход синхронизатора соединен с первым входом селектора номеров рабочих тиристоров, импульсный выход - с входом установки в нулевое состояние первого счетчика и первым входом установки в нулевое состояние второго счетчика, счетный вход счетчика внутриинтервального угла и первый вход формирователя сигналов управления соединены с выходом генератора внутриинтервального угла, выход счетчика внутриинтервального угла соединен с входом сумматора, соединенного вторым входом с числовым выходом дешифратора начального угла, выходом - с вторым входом формирователя сигналов
управления, третий вход которого соединен с потенциальным выходом задатчика тока, четвертый вход предназначен для подачи информации о токе и противоЭДС нагрузки, выход соединен с первым входом распределителя сигналов управления тиристорами и счетным входом счетчика сигналов управления, соединенного вторым входом установки в нулевое состояние с импульсным выходом задатчика тока, выходом - с входом дешифратора начального угла, логический выход которого соединен с вторым входом селектора номеров рабочих тиристоров,связанного выходом с вторым входом распределителя сигналов управления тиристорами, а формирователь сигналов управления выполнен решанвдим дифференциальное уравнение.
Tj-- sindut + YO) - t ,
де i
-относительный ток нагрузки;
Т,
-электромагнитная постоянная
а времени цепи нагрузки;
-круговая частота питающей и сети;
t „
-текущее время j
-угол открывания тиристора, измеренный от начала синусоиды напряжения;
е - относительная противоЭДС.


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный тиристорный электропривод постоянного тока и способ управления им | 1982 |
|
SU1171945A1 |
| Способ управления трехфазным мостовым тиристорным преобразователем и устройство для его осуществления | 1979 |
|
SU879731A1 |
| Способ управления тиристорным преобразователем | 1987 |
|
SU1539934A1 |
| Устройство для регулирования трехфазного напряжения | 1983 |
|
SU1097983A1 |
| Устройство для компенсации реактивной мощности | 1986 |
|
SU1347118A1 |
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| НИЗКОВОЛЬТНЫЙ СИЛЬНОТОЧНЫЙ ИСТОЧНИК ПИТАНИЯ ДЛЯ СТАНКОВ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ МЕТАЛЛОВ | 1991 |
|
RU2025031C1 |
| Многоканальное устройство для управления тиристорным преобразователем | 1990 |
|
SU1781786A1 |
| Способ управления приводом регулирующего органа ядерного реактора и устройство для его осуществления | 1990 |
|
SU1785043A1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
1. Способ управления тир дсторньйл преобразователем, работающим на активно-индуктивную нагрузку и противоЭДС, заключающийся в том, что контролируют линейные напряжения сети, фиксируют моменты естественной коммутации, в которые вырабатывают синхронизирующие сигналы, формируют сигналы управления тиристорами преобразователя и подают их на тиристоры, отличаю, щ и и с я тем, что, с целью повышения точности и надежности, измеряют ток и противоЭДС нагрузки, задают ток нагрузки, фиксируют момент изменения знака заданного тока нагрузки, выде- : ляют шесть последовательных интервалов между моментами естественной коммутации, определяют линейные напряжения, имеющие начальные углы 180,120 и 60 эл.град. на данном интервале, с Начала очередного указанного интервала или с момента изменения знака заданного тока нагрузки, непрерывно определяют текущий угол очередного подаваемого на нагрузку линейного напряжения, в качестве которого используют сначала линейное напряжение с начальным углом 180 зл.град., после начала подачи на нагрузку этого напряжения - линейное напряжение с начальным углом.в 120 эл.град., а после его подачи - линейное напряжение 1 с начальным углом 60 эл.град., в со(Л ответствии с выражением di 1 Т, sin( + Vp) - е, Э dt О где i - относительный ток нагрузки; Та i-g - электромагнитная постоянная s времени цепи нагрузки; . w - круговая частота питающей сети/ t - текущее время; . 00 ОО VQ - угол открывания тиристора; измеренный от начала синусоиды напряжения. оо 1 - относительная противоЭДС, определяют требуемый момент подачи на нагрузку соответствующего очередного 4;:: линейного напряжения,при наступлении которого формируют указанный сигнал управления, подаваемый на тиристоры, преобразователя.
i
Изобретение относится к электротехнике и может быть использовано для управления током нагрузки трехфазного мостового тиристорного преобразователя систем автоматизированног электропривода.
Известен способ управления тиристорным преобразователем,- работающим на активно-индуктивную нагрузку .и противоЭДС, по которому задают значение тока нагрузки и формируют синхронизированный с напряжением сети сигнал развертки, измеряют мгновенное значение тока нагрузки и открывают очередной диристор преобразователя, когда сигнал развертки меньше или равен сигналу, сформированному из разности двух сигналов - задания и мгновенного значения тока нагрузки, причем сигнал развертки формирует как периодическую функцию времени форма которой на каждом периоде неизменна. Устройство,, реализуивдее этрт способ yпpaвJleния содержит регулятор, синхрони атор с напряжением сети, генег атор- развертки, компараторы, датчик обратной связи и распределитель сигналов управления тиристорами Cl3.
Однако этот способ и реализующее его устройство не обеспечивают динамическую точность и простоту управления работой преобразователя при различных изменениях задания, тока нагрузки и частоты вращения двигателя.
Известен также способ управления тиристорным преобразователем, работающим на активно-иднуктивную нагрузку и противоЭДС,г по которому задают управляющий сигнал, сравнивают его с сигналом обратной связи, разностью их, усиленной регулятором, управляют частотой генератора, фазовый угол которого относительно напряжения сети определяет угол управления тиристорным преобразователем. Устройство, реализующее данный способ управления, содержит регулятор, управляемый генератор, датчик обратной связи и распределитель импульсов управления тиристорами С2.
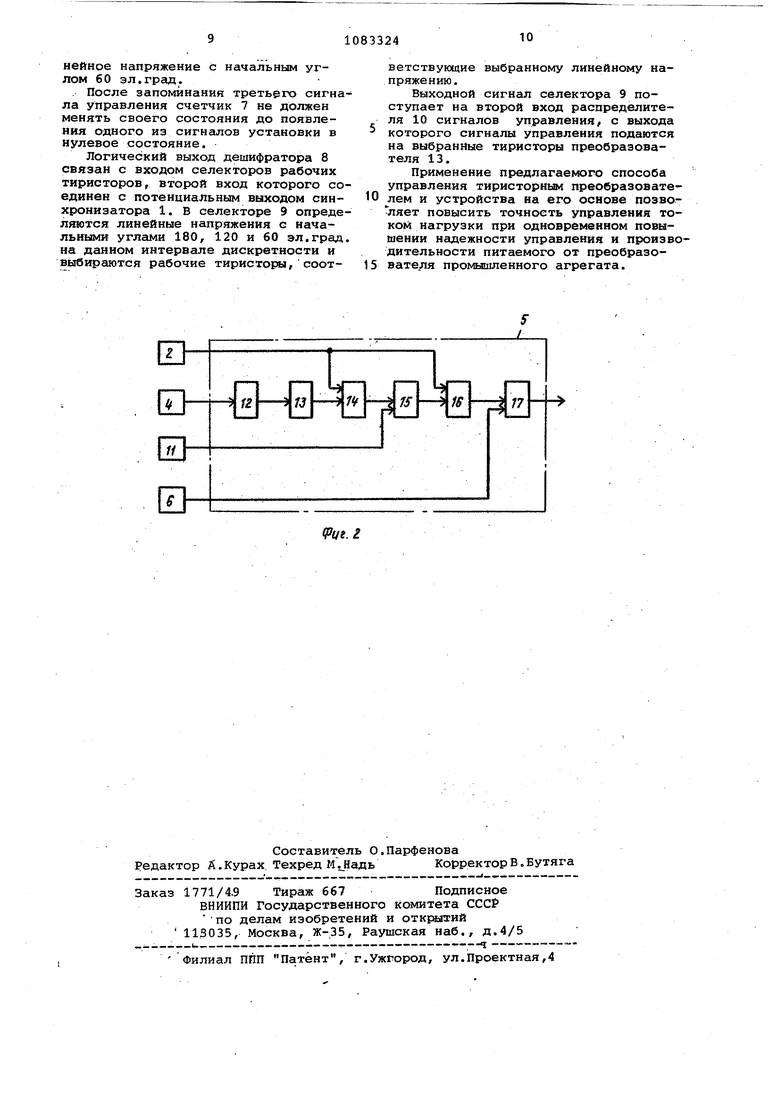
Однако с помощью данного спосбба и реализующего его устройства также нельзя достичь динамической точности и простоты управления работой преоб разователя. Наиболее близким по технической сущности к изобретению является одн канальное устройство для управления преобразователем. Способ управления преобразователем, соответствующим указанному устройству, заключается в том, что Контролируют линейные напряжения сети, фиксируют моменты естественной коммутации,, в которые вырабатывают синхронизирующие сигна лы, по ним задают исходное нулевое значение и в интервале между моментами естественной коммутации формируют линейно изменяющийся во времени сигнал, по i-му синхронизирующему импульсу запоминают номер очередног i-ro тиристора и подготавливают к пропуску сигнала управления канал управления этого тиристора, сравнивают линейно изменяющийся сигнал с заданием и при превышении им задани формируют си1:нал управления, с помощью которого включают i-й тирис-.. тор.и Стирают ранее запомненный номер, а если сигнал управления в течение i-ro интервала не формируют, то по следующему синхронизирующему импульсу запоминают дополнительный номер (i+l)-ro тиристора, затем ана логично - (i+2)-ro, по числу запомвенных номеров тиристоров формируют соответствующий добавочный сигнал, который суммируют с линейно изменяющимся сигналом и результат суммиров ния сравнивают с заданием аналогично предьщущему. Одноканальное устройство для упра вления преобразователем содержит синхронизатор с напряжением сети, генератор пилообразного напряжения, логический блок, нуль-орган, формирователь сигналов управление и преобразователь числа импульсов в напряжение, причем первый вход нульрргана связан через генератор с вьаходом си-нхронизатора с напряжением сети и входом логического блока,вто рой - с устройством задания, третий через преобразователь числа импульсов в напряжение - с выходом логического блока, второй вход которого связан с выходом нуль-органа, а .рой выход - с формирователем сигналов управления СЗ. I Однако известный способ и устрой ство для его осуществления так же, как и другие одноканальные функциональные аналоги, не позволяют реши задачу достижения необходимой динамической точности регулирования тока нагрузки тиристорного преобразов теля, работающего на активно-гиндуктивную нагрузку и противоЭДС, и обладёиот низкой функциональной надежностью из-за сложности управления. Для получения предельной динамической точности указанной системы регулирования тока необходимо решить дифференциальное уравнение i + T-lf sin(wt + V, at где i - относительный ток нагрузки Tj - электромагнитная постоянная времени цепи нагрузки; ш - круговая частота питающей t - текущее время; Vj - угол открывания тиристора, измеренный от начала синусоиды напряжения; е - относительная противоЭДС, причем решение должно быть выполнено с учетом всех перечисленных факторов, определяющих поведение тока на интервале провс1дкмости, в том числе Начальных условий и текущего угла напряжения на очередном открываемом тиристоре. Кроме того, по известным способам одноканального упрйвления тиристорами сначала по зад1анному выходному напряжению преобразователя определяют угол включения тиристора, а затем уже текущий угол соответствующего тиристору напряжения, что не дает возможности решить уравнение (1), особенно в нестационарном режиме работы.. Цель изобретения - повышение точности управления током нагрузки при одновременном повышении надежности управления и повышении производительности питаемого от преобразователя промышленного агрегата. Поставленная цель достигается тем, что согласно способу управления тиристорным преобразователем контролируют .линейные напряжения сети, фиксируют моменты естественной коммутации, в которые вырабатывают синхронизирующие сигналы, измеряют ток и противоЭДС нагрузки, задают ток нагрузки, фиксируют момент изменения знака заданного тока нагрузки, выделяют шесть последовательных интервалов между моментами естественной коммутации, определяют линейные напряжения, имеющие начальные углы 180,120.и 60 эл.град. на данном интервале, с начала очередного интервала или с момента изменения,знака задания тока, непрерывно определяют текущий угол очередного подаваемого на нагрузку линейного напряжения, в качестве которого используют сначала линейное напряжение с начальным углом 18Q эл.град., после начала подачи на .нагрузку этого напряжения линейное напряжение с начальным углом 120 эл.град., а после его подачи - линейное напряжение с начальным углом. 60 эл.град./ в соответствии с выражением (1) определяют требуемый момент подачи на нагрузку соответст вующего очередного линейного напряж кля, при наступлении кадого такого момента формируют сигнал управления тиристорами преобразователя и подаю на нагрузку соответствукщее линейно напряжение. Указанная цлеь в устройстве, реа лизующем способ, достигается тем, что оно содержит синхронизатор с на пряжением сети, генератор внутриинтервального угла, счетчик внутриинтервального угла, сумматор, дешифра тор текущего угла, преобразователь код-напряжение, формирователь сигна лов управления, задатчик тока, сче чик сигналов управления, дешифратор начального угла, селектор номеров рабочих тиристоров, распределитель сигналов управления тиристорами и объект управления в виде тиристорно го преобразователя с нагрузкой, с выходом которого связаны входы форми рователя сигналов управления и синхронизатора с напряжением сети, сое диненного потенциальным выходом с входом селектора номеров рабочих тиристоров , а импульсным выходом - с входами установки в нулевое состояние обоих счетчиков, счетный вход счетчика внутриинтервального угла вместе с первым входом формирователя сигналов управления соединен с выходом 1енератора внутриинтервального угла, а выход - с входом сумматора, связанного по второму входу с числовым выходом дешифратора начального угла, а по выходу - с вторым входом формирователя сигналор управления, третий вход которого соединен с.поте циальным выходом задатчика тока, чет вертый вход предназначен для подачи информации о токе и противоЭДС нагру ки, а выход - с первым входом распре делителя сигналов управления трристо рами и счетньим входом счетчика сигналов управления, связанного по второму входу установки в нулевое состояние, с импульсным выходом задатчи ка тока, а по выходу - с входом деши ратора начального угла, логический в ход которого соединен с вторым входом селектора номеров рабочих тиристоров, связанного выходом с вторым уходом распреде;1ителя сигналов управ ления тиристорами, выход последнего соединен с объектом управления, причем формирователь сигналов управлени выполнен решающим дифференциальное уравнение (1), На фиг.1 приведена .структурная схема устройства, реализукяцего пред лагаемый способ н& фиг.2 - вариант выполнения фор1 Аир/эвателя, сигналов управления. , в устройстве по фиг.1 импульсный выход синхронизатора 1 с напрйжением сети и выход генератора 2 внутриинтервального угла ; соединены соответственно с входом установки в нулевое состояние и счетным входим счетчика 3 внутриинтервального угла. Сумматор 4, связан по входу с выходом счетчика 3, а по выходу - с входом формирователя 5 сигналов управления, второй вход которого соединен с выходом генератора 2, а третий вход - с потенциальным выходом задатчика б тока. Первый и второй входы установки в нулевое состояние счетчика 7 сигналов управления связаны с импульсными выходами соответственно синхронизатора 1 и задатчика 6 тока, а его выход с входом дешифратора 8 начального угла, числовой выход которого соединен с вторым входом сумматора 4, а логический выход - с входом селектора 9 номеров рабочих тиристоров, связанного вторым входом с потенциальным выходом синхронизатора 1, а выходом - с входом распределителя 10 сигналов управления тиристорами. Второй вход -распределителя 1-0 вместе со счетньтм входом счетчика 7 сигналов управления соединен с выходом формирователя 5 сигнсшов управления, а выход распределителя - с входом объекта 11 управления, связанного по выходу с четвертым входом формирователя 5 и входом синхронизатора 1. Формирователь 5 содержит дешифратор 12 текущего угла, преобразователь код-напряжение 13, генератор 14 синусоидального напряжения, сумматор 15, интегратор 16 и компаратор 17. Способ осуществляют следующим образом. Сначала выделяют, например, по условию попарной положительности значений каждых двух линейных напряжений сети, сдвинутых одно относительно другого на угол 120 зл.град;, шесть последовательных во времени интервалов дискретности между моментами естественной коммутации. При этом в -каждом выделенном текущем интервале дискретности, напри- мер, интервале АВ, равном интервалу между.моментами естественной коммутации Т, в общем случае в произвольный момент времени могут быть подключены к нагрузке любые из шести линейных напряжений АВ,АС, ВС, ВА, СА или СВ. Однако практически при выборе рабочего линейного напряжения исключают из рассмотрения те напряжения, подключение, которых к нагрузке заведомо нецелесообразно, т.е. напряжения, имеющие начальныеуглы О, 240 и 360 эл.град, или в рассматриваемом интервале АВтАС и ВС-ВА. Далее определяют линейные напряжения, именидие начальные углы 180,120 и 60 эл.град.на данном интервале.
Из оставшихся трех линейных на- пряжений в качеств е рабочего сначала целесообразно выбрать то, у которого начальный угол больше, так как при этом достигаемый ток меньше, а В случае необходимости от этого тока oжнo перейти, к большему при подключении следующего по уменьшению начального угла линейного напряжения практически без потери быстродействия,
обратный же переход физически невоз- Ю
можен.
С начала очередного иятервала или с момента изменения знака задания тока непрерывно определяют текущий угол очередного подаваемого на на- 15 грузку линейного напряжения, в качестве которого используют сначала л нейное напряжение с начальным углом 180 эл.град., после начала подачи на нагрузку этого напряжения - линейное Q напряжение с начальным углом 120 эл.град., а после его, подачи - линейное напряжение с начальньнл углом б.О. эл.град.
Текущие углы линейных напрязкений с могут быть определены, напршиер, суммированием значений соответствующего начального угла с внутрнинтёрвальным УГЛОМ, отсчитываемым от начала текущего интервала.
Затем, используя каждое получвр- 3 нфе значение текущего угла, в зависимости от задания тока определяет требуемый момент подачи на нагрузку соответствующего очередного линейного напряжения, например, принимая 35 его текущий угол в качестве начального условия для решения дифференциального уравнения, определяющего поведение тока в нагрузке на интервале, проводимости выб занного линейно- 40 го .напряжения, и сравнивая результа- ты решения с заданием тока нагрузки.
При наступлении каждого момента равенства сравниваемых сигналов формируют сигнал управления, подаваемый . на тиристоры преобра.збвателя.
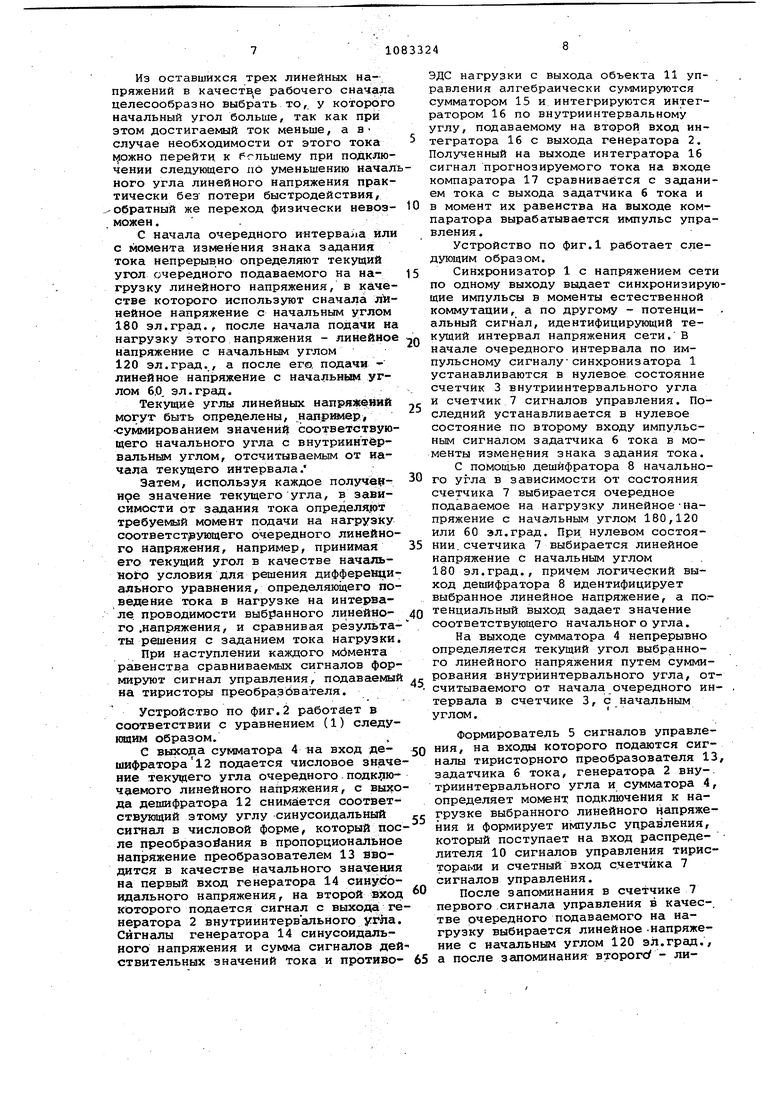
Устройство по фиг.2 работает в соответствии с уравнением (1) следущим образом.
е выхода сумматора 4 на вход де- 50 ифратора12 подается числовое зн.ачеие текущего угла очередного . подк: 1Юаемого линейного напряжения, с выхоа дешифратора 12 снимается соответствующий этому углу синусоидальный гс
сигнал в числовой форме, который после преобразования в пропорциональное напряжение преобразователем 13 вводится в качестве начального значения на первый вход генератора 14 синусоидального напряжения, на второй вход которого подается сигнал с выхода генератора 2 внутриинтервального . Сигналы генератора 14 синусоидального напряжения и сумма сигналов действительных значений тока и противо- 65
ЭДС нагрузки с выхода объекта 11 управления алгебраически суммируются сумматором 15 и интегрируются интегратором 16 по внутриинтервальному углу, подаваемому на второй вход интегратора 16 с выхода генератора 2. Полученный на выходе интегратора 16 сигнал прогнозируемого тока на входе компаратора 17 сравнивается с заданием тока с выхода задатчика 6 тока и в момент их равенства на выходе компаратора вырабатывается импульс управления.
Устройство по фиг.1 работает следующим образом.
Синхронизатор 1 с напряжением сет по одному выходу выдает синхронизирущие импульсы в моменты естественной коммутации, а по другому - потенциальный сигнал, идентифицирующий текущий интервал напряжения сети.В начале очередного интервала по импульсному сигналу синхронизатора 1 устанавливаются в нулевое состояние счетчик 3 Бнутриинтервального угла и счетчик 7 сигналов управления. Последний устанавливается в нулевое состояние по второму входу импульсным сигналом задатчика 6 тока в моменты изменения знака задания тока.
С помощью дешифратора 8 начального угла в зависимости от состояния счетчика 7 выбирается очередное подаваемое на нагрузку линейное-напряжение с начальным углом 180,120 или 60 эл.град. При. нулевом состоянии, счетчика 7 выбирается линейное напряжение с начальным углом 180 эл.град., причем логический выход дешифратора 8 идентифицирует выбранное линейное напряжение, а по,тендиальный выход задает значение соответствующего начального угла.
На выходе сумматора 4 непрерывно определяется текущий угол выбранного линейного напряжения путем суммирования внутрйинтервального угла, отсчитываемого от начала очередного интервала в счетчике 3, с начальным углом.
Формирователь 5 сигналов управления, на входы которого подаются сигналы тиристорного преобразователя 13 задатчика 6 тока, генератора 2 внутриинтервального угла и сумматора 4 определяет момент подключения к нагрузке выбранного линейного напряжения И формирует импульс управления, который поступает на вход распределителя 10 сигналов управления тиристорами и счетный вход с:четчйка 7 сигналов управления.
После запоминания в счетчике 7 первого сигнала управления в качес-. тве очередного подаваемого на нагрузку выбирается линейное .напряжение с начальным углом 120 эл.град., а после запоминания второгс/ - линейное напряжение с начальным углом 60 эл.град.
. После запоминания третьегхэ сигнала управления счетчик 7 не должен менять своего состояния до появления одного из сигналов установки в нулевое состояние.
Логический выход дешифратора 8 связан с входом селекторов рабочих тиристоров, второй вход которого соединен с потенциальным выходом синхронизатора 1. В селекторе 9 определяются линейные напряжения с начальными углс1ми 180, 120 и 60 эл.град. на данном интервале дискретности и выбираются рабочие тиристори, соответствующие выбранному линейному напряжению.
Выходной сигнал селектора 9 поступает на второй вход распределителя 10 сигналов управления/ с выхода которого сигналы управления подаются на выбранные тиристоры преобразователя 13.
Применение предлагаемого способа управления тиристорным преобразоватеутем и устройства на его основе позволяет повысить точность управления токоМ нагрузки при одновременном повышении надежности управления и производительности питаемого от преобразо5 вателя промышленного агрегата.
