Изобретение относится к электротехнике и может быть использовано для у-фавления тиристорным преобразователем с предельным быстродействием, ра ботающим на активно-индуктивную нагрузку с противоЭДС, например на якорную цепь двигателя постоянного тока.
Цель изобретения - з прощение способа.
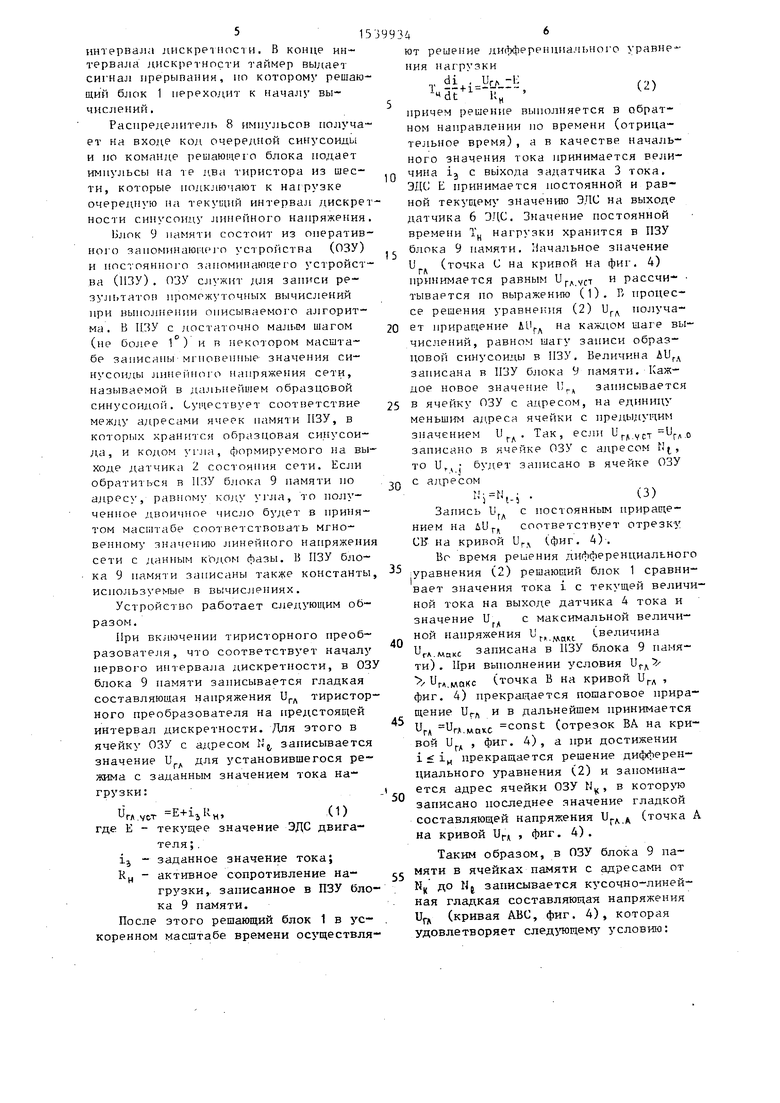
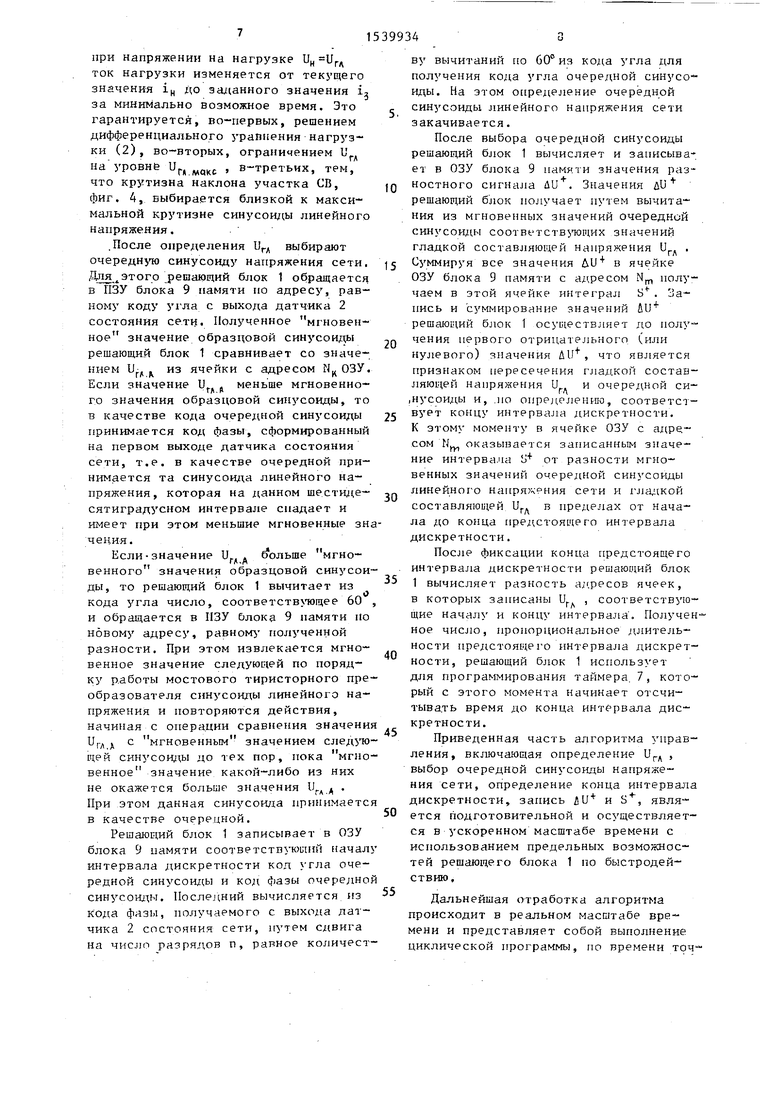
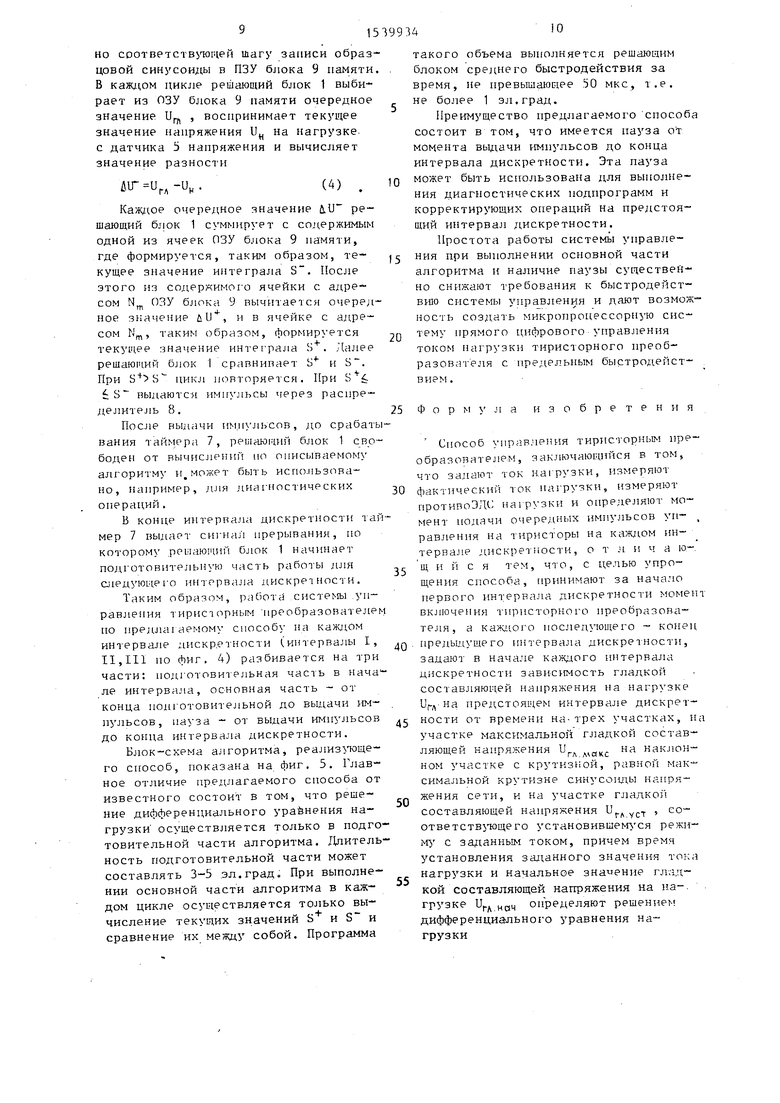
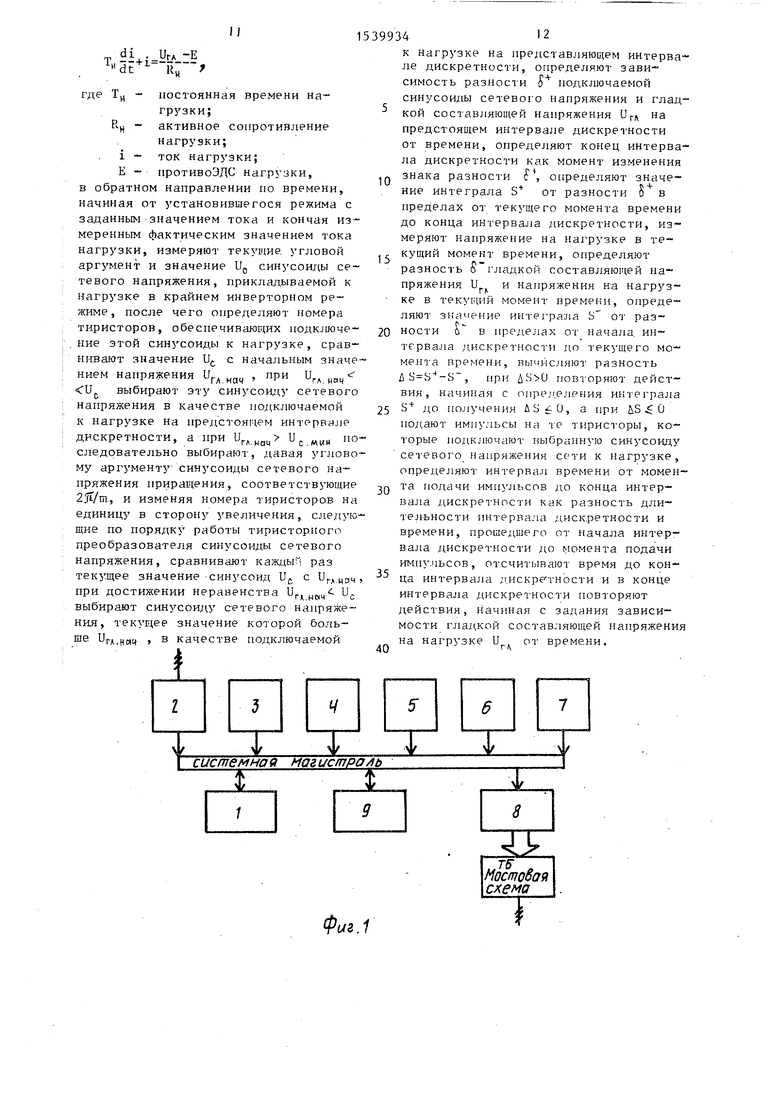
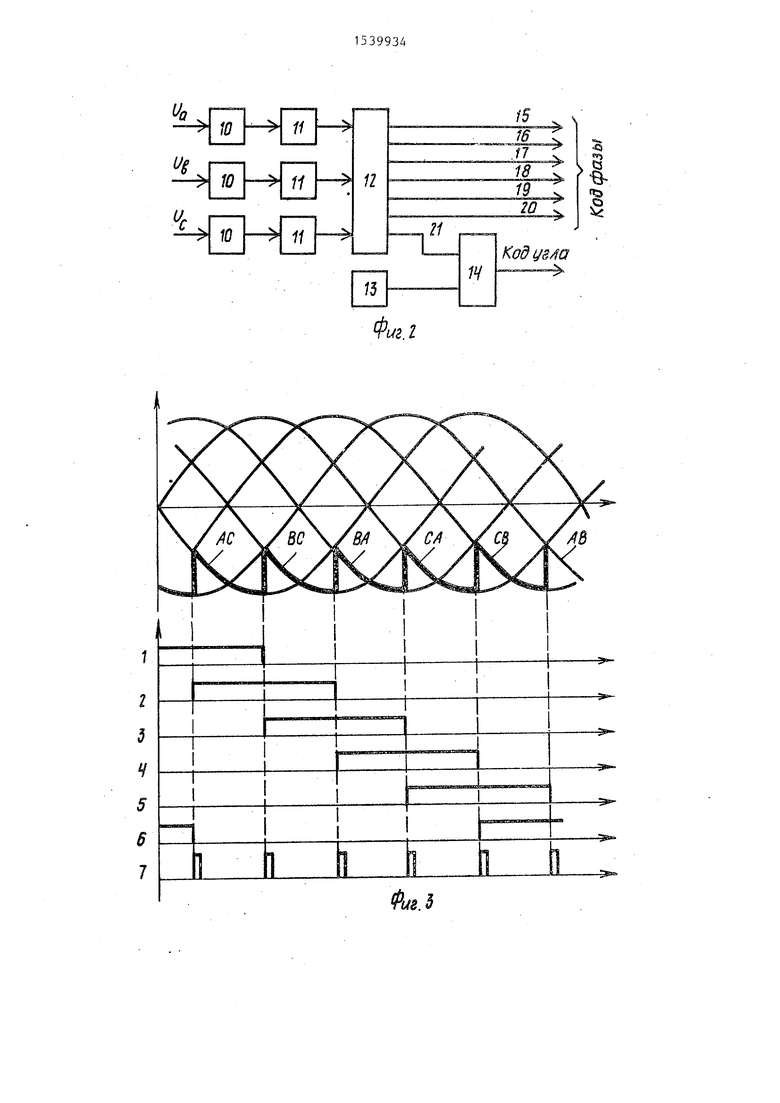
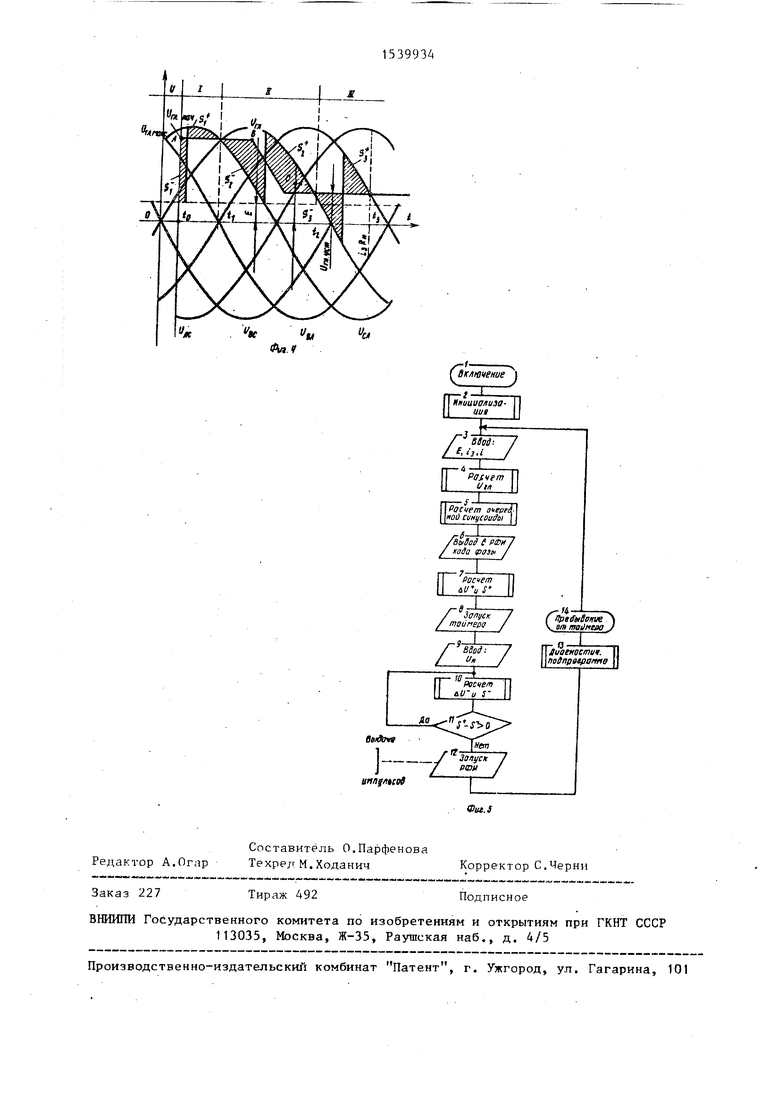
На фиг. 1 показана блок-схема устройства для осуществления предлагаемого способа управления; на фиг. 2 - блок-схема датчика состояния сети; на фиг. 3 - диаграмма, поясняющая определение состояния сети; на фиг.4 - диаграмма -напряжений на нагрузке при работе согласно предлагаемому способу чиристорного преобразователя с си- ловой цепью, собранной по трехфазной мостовой схеме; на фиг. 5 - блок-схема алгоритма работь- устройства.
Устройство (фиг. 1) содержит решающий блок 1, датчик 2 состояния сети, задатчик 3 тока, датчик 4 тока, датчик 5 напряжения, датчик 6 ЭДС двигателя, таймер 7, распределитель 8 импульсов и блок 9 памяти. Все элементы объединены шинами данных, адреса и управления.
Решающий блок 1 состоит из процессора и постоянного запоминающего устройства | в котором записана программа выполнения вычислений.
Датчик 2 состояния сети (фиг. 2) построен с использованием фильтров 10 компараторов 11, дешифратора 15, генератора 13 импульсов и счетчика 14. На вход фильтров 10 подано трехфазное сетевое напряжение Ua,U,Uc. Компараторы 11 меняют свое состояние дри переходе через ноль напряжений на входах фильтров 10. Выходы компаратора 11 образуют трехразрядиое двоичное число, меняющееся шесть раз за период сетевого напряжения. Это двоичное число является входным для дешифратора 12, Дешифратор 12 имеет на выходе шины 15-21, состояние которых меняется в соответствии с входным двоичным трехразрядным числом. Диа граммы изменения состояния шин 15-21 приведены на фиг. 3. Входная фазиров- ка и инерционность фильтров чиТса состояния сети подобраны такими, чтобы изменения состояния шин 15-21 дешифратора 12 происходили одновременно с моментами выдачи импуль-
0
5
5
с
0
0
5
0
45
0
5
сов управления в крайнем инверторном режиме. Так, появление единичного сигнала на шине 16 при наличии единичного сигнала на шине 15 и нулевых сигналов на шинах 17-20 соответствует включению тиристоров № 1 и № 2 в мосту и подключению к нагручке линейной синусоиды АС в крайнем инверторном режиме. Состояние шин 15-20 является выходным сигналом датчика состояния сети и в дальнейшем называется кодом фазы. На шине 21 дешифратора 12 формируются шесть раз за период узкие импульсы, передний фронт которых совпадает с моментом изменения состояния шин и устанавливает счетчик 14 в исходное состояние. После установки в исходное состояние счетчик 14 считает импульсы от генератора 13 и на выходе представляет результат счета в виде восьмиразрядного двоичного числа, который в дальнейшем называется кодом угла, так как в некотором масштабе отражает текущее значение аргумента - угла синусоиды линейного напряжения с выбранным кодом фазы.
Таким образом, датчик состояния сети имеет два выхода. На первом выходе формируется код фазы - условный номер той синусоида линейного напряжения питающей сети, которая на данном шестидесятиградусном интервале между соседними импульсами шины 21, во-первых, спадает и, во-вторых, имеет меньшие мгновенные значения. На втором выходе датчика состояния сети, являющемся по сути счетчиком реального времени, формируется код угла.
Задатчик 3 тока формирует на выходе сигнал заданного значения тока нагрузки ij и является регулятором внешнего контура (например, скорости в электроприводе по схеме с подчиненным регулированием).
Датчик 4 тока формирует на выходе сигнал, пропорциональный току 1Н нагрузки, t
Датчик 5 напряжения формирует на выходе сигнал, пропорциональный напряжению 1Н на нагрузке.
Датчик 6 ЭДС двигателя вычисляет текущее значение ЭДС Е двигателя, используя значение тока 1Н и напряжения UH на нагрузке.
Таймер 7 программируется решающим блоком 1 для отсчета времени до конца
51539934
интервала дискретности. В конце интервала дискретности таймер выдает
сигнал прерывания, по которому решающий блок 1 переходит к началу вычислений .
Распределитель 8 импульсов получает на входе код очередной синусоиды и но команде решающего блока подает импульсы на те два тиристора из шести, которые подключают к на рузке очередную на текущий интервал дискретности синусоиду линейного напряжения.
Блок 9 памяти состоит из оперативного запоминавшего устройства (ОЗУ) и постоянного запоминающего устройства (ПЗУ) . ПЗУ служит для записи результатов промежуточных вычислений при выполнении описываемого алгоритма . В ПЗУ с достаточно малым шагом (не более 1 ) и в некотором масштабе записаны мгновенные значения синусоиды линейного напряжения сети, называемой в дальнейшем образцовой синусоидой. Существует соответствие между адресами ячеек памяти ПЗУ, в которых хранится образцовая синусоида, и кодом угла, формируемого на выходе датчика 2 состояния сети. Если обратиться в ПЗУ блока 9 памяти по адресу, равному коду угла, то полученное двоичное число будет в принятом масштабе соответствовать мгновенному значению линейного напряжения сети с данным кодом фазы. В ПЗУ блока 9 памяти записаны также константы, используемые в вычислениях.
Устройство работает следующим образом.
При включении тиристорного преобразователя, что соответствует началу первого интервала дискретности, в ОЗУ блока 9 памяти записывается гладкая составляющая напряжения игл тиристорного преобразователя на предстоящей интервал дискретности. Для этого в ячейку ОЗУ с адресом записывается значение Ь ГА для установившегося режима с заданным значением тока нагрузки:
UrAvor E+isRH,(1)
где Е - текущее значение ЭДС двигателя ;.
заданное значение тока; активное сопротивление нагрузки, записанное в ПЗУ блока 9 памяти.
После этого решающий блок 1 в ус- коренном масштабе времени осуществля-
1i RU
5
0
5
0
5
0
ют решение дифференциального уравнения нагрузки
т . (2) dt к„ и;
причем решение выполняется в обратном направлении по времени (отрицательное время), а в качестве начального значения тока принимается величина 1Э с выхода эадатчика 3 тока. ЭДС С принимается постоянной и равной текущему значению ЭЛС на выходе датчика 6 ЭДС. Значение постоянной времени Тн нагрузки хранится в ПЗУ блока 9 памяти. Начальное значение I) . (точка С на кривой на фиг. 4)
ГА
принимается равным UrAVCT и рассчи- тывается по выражению (1). F/ процессе решения уравнения (2) Ur/v получает приращение АИГЛ на каждом шаге вычислений, равном шагу записи образцовой синусоиды в ПЗУ. Величина AUrA записана в ПЗУ блока У памяти. Каждое новое значение IIГЛ записывается в ячейку ОЗУ с адресом, на единицу меньшим адреса ячейки с предыдущим значением U гд . Так, если UrfVCT llr/(0 записано в ячейке ОЗУ с адресом N, то UMJ будет записано в ячейке ОЗУ с адресом
.j
Запись II
i л
(3) с постоянным приращением на дигл соответствует отрезку СК на кривой игл (.фиг. 4).
Во время решения дифференциального уравнения (2) решающий блок 1 сравнивает значения тока i с текущей величиной тока на выходе датчика 4 тока и значение U . с максимальной величиГ А
bVWQKt величина записана в ПЗУ блока 9 памянои напряжения -t,.WQKt
5
0
5
ти). При выполнении условия игл им.макс (точка В на кривой игл , фиг. 4) прекращается пошаговое приращение игл и в дальнейшем принимается UrA игл.макс const (отрезок ВА на кривой Uryk , фиг. 4), а при достижении iЈ iH прекращается решение дифференциального уравнения (2) и запоминается адрес ячейки ОЗУ NK, в которую записано последнее значение гладкой составляющей напряжения игл.д (точка А на кривой UrA , фиг. 4).
Таким образом, в ОЗУ блока 9 памяти в ячейках памяти с адресами от NJ, до NJ записывается кусочно-линейная гладкая составляющая напряжения Uf-д (кривая ABC, фиг. 4), которая удовлетворяет следующему условию:
при напряжении на нагрузке UH игл ток нагрузки изменяется от текущего значения 1Н до заданного значения i, за минимально возможное время. Это гарантируется, во-первых, решением дифференциального уравнения нагрузки (2), во-вторых, ограничением Ь гд на уровне игд МС)КС , в-третьих, тем, что крутизна наклона участка СВ, фиг. 4, выбирается близкой к максимальной крутизне синусоиды линейного напряжения.
.После определения UrA выбирают очередную синусоиду напряжения сети. Для.. этого решающий блок 1 обращается в ПЗУ блока 9 памяти по адресу, равному коду угла с выхода датчика 2 состояния сети. Полученное мгновенное значение образцовой синусоиды решающий блок 1 сравнивает со значением UrA K из ячейки с адресом NKОЗУ. Если значение IL. ,. меньше мгновенно-
Г л Р
го значения образцовой синусоиды, то в качестве кода очередной синусоиды принимается код фазы, сформированный на первом выходе датчика состояния сети, т.е. в качестве очередной принимается та синусоида линейного напряжения, которая на данном шестидесятиградусном интервале спадает и имеет при этом меньшие мгновенные знчения.
Если-значение U
ГА-А
б олыпе мгновенного значения образцовой синусоиды, то решающий блок 1 вычитает из кода угла число, соответствующее 60 , и обращается в ПЗУ блока 9 памяти по новому адресу, равному полученной разности. При этом извлекается мгновенное значение следукщей по порядку работы мостового тиристорного преобразователя синусоиды линейного напряжения и повторяются действия, начиная с операции сравнения значения и,д д с мгновенным значением следующей синусоиды до тех пор, пока мгновенное значение какой-либо из них не окажется больше значения UrA A . При этом данная синусоида принимается в качестве очередной.
Решающий блок 1 записывает в ОЗУ блока 9 памяти соответствующий началу интервала дискретности код угла очередной синусоиды и код фазы очередной синусоиды. Последний вычисляется из кода фазы, получаемого с выхода датчика 2 состояния сети, путем сдвига на число разрядов п, равное количест,
0
5
0
5
0
5
0
5
0
5
ву вычитаний по 60° из кода угла для получения кода угла очередной синусоиды. На этом определение очередной синусоиды линейного напряжения сети закачивается.
После выбора очередной синусоиды решающий блок 1 вычисляет и записывает в ОЗУ блока 9 памяти значения разностного сигнала ди. Значения д1)t решающий блок получает путем вычитания из мгновенных значений очередний синусоиды соответствующих значений гладкой составляющей напряжения UrA . Суммируя все значения UU+ в ячейке ОЗУ блока 9 памяти с адресом Nm получаем в этой ячейке интеграл S. Запись и суммирование значений UU4 решающий блок 1 осуществляет до получения первого отрицательного (или нулевого) значения ДИ, что является признаком пересечения гладкой составляющей напряжения U и очередной си- ,нусоиды и, по определению, соответствует концу интервала дискретности. К этому моменту в ячейке ОЗУ с адресом N оказывается записанным значение интервана У+ от разности мгновенных значений очередной синусоиды линейного напря ч°ния сети и гладкой составляющей игд в пределах от начала до конца предстоящего интервала дискретности.
После фиксации конца предстоящего интервала дискретности решающий блок 1 вычисляет разность адресов ячеек, в которых записаны Ur/s , соответствующие началу и концу интервала. Полученное число, пропорциональное длительности предстоящего интервала дискретности, решающий блок 1 использует для программирования таймера 7, который с этого момента начинает отсчитывать время до конца интервала дискретности.
Приведенная часть алгоритма управления, включающая определение UrA , выбор очередной синусоиды напряжения сети, определение конца интервала дискретности, запись ЈU + и , является подготовительной и осуществляется в ускоренном масштабе времени с использованием предельных возможностей решающего блока 1 по быстродействию.
Дальнейшая отработка алгоритма происходит в реальном масштабе времени и представляет собой выполнение циклической программы, по времени точно соответствукщей шагу записи образцовой синусоиды в ПЗУ блока 9 памяти. В каждом цикле решающий блок 1 выбирает из ОЗУ блока 9 памяти очередное значение U , воспринимает текущее значение напряжения UH на нагрузке с датчика 5 напряжения и вычисляет значение разности
-и
гл
(4)
Каждое очередное значение u.U решающий блок 1 суммирует с содержимым одной из ячеек ОЗУ блока 9 памяти, где формируется, таким образом, текущее значение интеграла S. После этого из содержимого ячейки с адре сом Nm ОЗУ блока 9 вычитается очередное значение uU4, и в ячейке с адресом Nw, таким образом, формируется
SS4
решающий блок I сравнивает S и При ЬЪ8 цикл повторяется. При ЈS выдаются импульсы через распределитель 8.
После выдачи импульсов, до срабатывания таймера 7, решающий блок 1 свободен от вычислений по описываемому алгоритму ишможет быть испопьзова- но, например, для диагностических операций.
В конце интервала дискретности таймер 7 выдает сигнал прерывания, по которому решающий блок 1 начинает подготовительную часть работы для следующего интервала дискретности.
Таким образом, работа системы управления тиристорным преобразователем по предла аемому способу на каждом интервале дискретности (интервалы I, 11,111 по фиг. 4) разбивается на три части: поди отовит ельная часть в нача ле интервала, основная часть - от конца ноли отовительной до выдачи импульсов, пауза - от выдачи импульсов до конца интервала дискретности.
Блок-схема алгоритма, реализующего способ, показана на фиг. 5. Главное отличие предлагаемого способа от известного состоит в том, что решение дифференциального уравнения нагрузки осуществляется только в подготовительной части алгоритма. Длительность подготовительной части может составлять 3-Ь эл.град. При выполнении основной части алгоритма в каждом цикле осуществляется только вычисление текущих значений S и S и сравнение их между собой. Программа
10
15
20
такого объема выполняется решающим блоком среднего быстродействия за время, не превышающее 50 мкс, т.е. не более 1 эл.град.
Преимущество предлагаемого способа состоит в том, что имеется пауза от момента выдачи импульсов до конца интервала дискретности. Эта пауза может быть использована для выполнения диагностических подпрограмм и корректирующих операций на предстоящий интервал дискретности.
Простота работы системы управления при выполнении основной части алгоритма и наличие паузы существенно снижают требования к быстродействию системы управления и дают возможность создать микропроцессорную систему прямого цифрового управления током нагрузки тиристорного преобразователя с предельным быстродействием .
25 Формула изобретения
Способ управления тиристорным преобразователем, заключающийся в том, что задают ток на рузки, измеряют фактический ток нагрузки, измеряют противоЭДС HaipysKH и определяют момент подачи очередных импульсов уп- % равнения на тиристоры на каждом интервале дискретности, о т л и ч а ю- щ и и с я тем, что, с целью упрощения способа, принимают за начало первого интервала дискретности момент включения тиристорного преобразователя, а каждого последующего - конец предыдущего интервала дискретности, задают в начале каждого интервала дискретности зависимость гладкой составляющей напряжения на нагрузке игд на предстоящем интервале дискретности от времени на-трех участках, на участке максимальной гладкой состав
0
5
ляющей напряжения 11ГД на наклонном участке с крутизной, равной максимальной крутизне синусоиды напряжения сети, и на участке гладкой составляющей напряжения UrAуст , соответствующего установившемуся режиму с заданным током, причем время установления заданного значения тока нагрузки и начальное значение гладкой составляющей напряжения на нагрузке UrA ноч определяют решением дифференциального уравнения нагрузки
1/
т s i+i-Lb -E
iHdt + 1 R
где Т„ н
RH
iЕпостоянная времени нагрузки;
активное сопротивление нагрузки; ток нагрузки; противоЭДС нагрузки, в обратном направлении по времени, начиная от установившегося режима с заданным значением тока и кончая измеренным фактическим значением тока нагрузки, измеряют текущие угловой аргумент и значение U0 синусоиды сетевого напряжения, прикладываемой к нагрузке в крайнем инверторном режиме, после чего определяют номера тиристоров, обеспечивающих подключение этой синусоиды к нагрузке, сравнивают значение Ut с начальным значением напряжения игл нац , при игл ноч - UC выбирают эту синусоиду сетевого напряжения в качестве подключаемой к нагрузке на предстоящем интервале дискретности, а при иглнач Uc WMH no1 i м ич и m. v «
следовательно выбирают, давая угловому аргументу синусоиды сетевого напряжения приращения, соответствующие 2jT/m, и изменяя номера тиристоров на единицу в сторону увеличения, следующие по порядку работы тиристорного преобразователя синусоиды сетевого напряжения, сравнивают каждый раз текущее значение синусоид Uc с иглмач при достижении неравенства Ur)kHH4c uc выбирают синусоиду сетевого напряжения, текущее значение которой больше иГД|НЙЧ , в качестве подключаемой
3993412
к нагрузке на представляющем интервале дискретности, определяют зависимость разности $ подключаемой синусоиды сетевого напряжения и гладкой составляющей напряжения игл на предстоящем интервале дискретности от времени, определяют конец интервала дискретности как момент изменения
Q знака разности Ј, определяют значение интеграла S+ от разности 8+ в пределах от текущего момента времени до конца интервала дискретности, измеряют напряжение на нагрузке в те15 КУВДЙ момент времени, определяют разность & гладкой составляющей напряжения Up)k и напряжения на нагрузке в текущий момент времени, определяют значение интеграла Ь от раэ20 ности 6 в пределах от начала интервала дискретности до текущего момента времени, вычисляют разность US S4-S, при повторяют действия, начиная с определения интеграла
25 + до получения ASЈ(J, а при &S О подают импульсы на те тиристоры, которые подключают выбранную синусоиду сетевого напряжения сети к нагрузке, определяют интервал времени от момен-
3Q та подачи импульсов до конца интервала дискретности как разность длительности интервала дискретности и времени, прошедшего от начала интервала дискретности до момента подачи импуцьсов, отсчитывают время до конца интервала дискретности и в конце интервала дискретности повторяют действия, начиная с задания зависимости гладкой составляющей напряжения
40
на нагрузке U от времени,
Г Л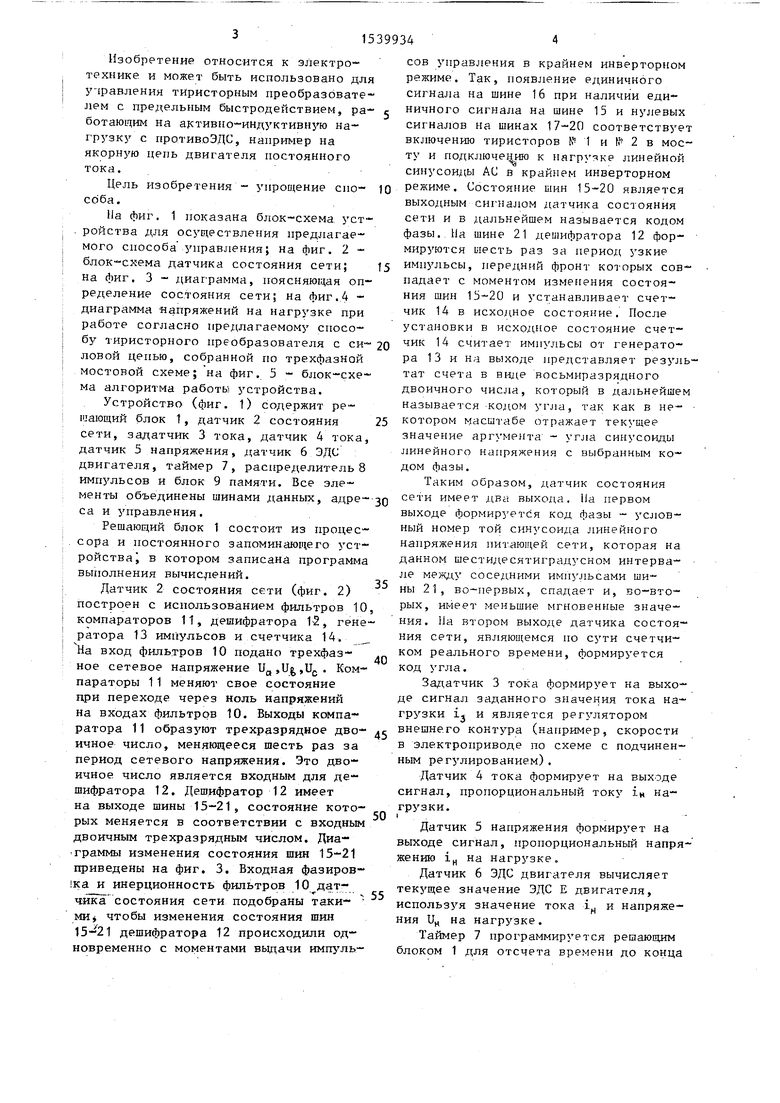
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропроцессорное устройство для управления вентильным преобразователем | 1985 |
|
SU1356155A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Способ управления тиристорным преобразователем и устройство для его осуществления | 1982 |
|
SU1083324A1 |
| МНОГОМЕРНЫЙ СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР УСРЕДНЕННОЙ МОЩНОСТИ НЕСТАЦИОНАРНОЙ НАГРУЗКИ | 1992 |
|
RU2060542C1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2004 |
|
RU2262189C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ФОРМЫ КРИВОЙ НАПРЯЖЕНИЯ | 2014 |
|
RU2580944C1 |
| Устройство для управления вентильным преобразователем | 1984 |
|
SU1205243A2 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2008 |
|
RU2380716C1 |
Изобретение применяется в системах управления тиристорными преобразователями с предельным быстродействием контура тока на базе микропроцессорных средств. Цель изобретения - упрощение. Согласно способу измеряют фактический ток нагрузки, и определяют момент подачи очередных импульсов управления таким образом, чтобы фактический ток нагрузки достиг заданного значения за один интервал дискретности без перерегулирования. Затем определяют интервал дискретности через пересечение гладкой составляющей напряжения Uгл с очередной синусоидой. Определяют зависимость гладкой составляющей напряжения Uгл от времени на предстоящий интервал дискретности. По известной Uгл и состоянию сети определяют очередную синусоиду напряжения сети, которая должна подключаться к нагрузке в предстоящем интервале дискретности. Определяют значение интеграла от разности очередной синусоиды напряжения сети и Uгл в пределах от текущего момента до конца интервала дискретности. Измеряют напряжение тиристорного преобразователя и определяют значение интеграла от разности Uгл и напряжения ти
назаров александр викторович
амельченко игорь леонидович+2066477UрRIGнт oF тRаNSISтоR 
Фм.1
Фиг. I
Фм 9
Редактор А.Огар
Составитель О.Парфенова Техред М.Ходанич
Заказ 227
Тираж 492
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
/-1 ЙКА
Включение
Корректор С.Черни
Подписное
| Файнштеин Г..Г., Файнытейн Э.Г | |||
| Микропроцессорные системы управления тиристорными элект роприводами./Под ред | |||
| О.В.Слекановского | |||
| М.: Энерго- атомитдат, 1986, с | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
| Александров II.П., Анисимов И.П., Бирюков А.В., Козырев С.К., Ладыгин А.II., Слежановский О.В., Хуторецкий 15.И | |||
| Ускорение отработки задания тока тиристорного преобразователя | |||
| - Автоматизированный электропривод, силовые полупроводниковые приборы, преобразовательная техника | |||
| Актуальные проблемы и задачи | |||
| М.: Энергоатомиздат, 1983, с | |||
| Способ утилизации отработанного щелока из бучильных котлов отбельных фабрик | 1923 |
|
SU197A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
