Предметом изобретения является устройство для дистанционного управления сортировкой леса транспортерами нри помощи программного механизма.
Известные устройства подобного рода не обеспечивают точного срабатывания сбрасывающего механизма, причем величина ошибки изменяется в процессе работы и зависит от скорости движения транспортера.
Для устранения указанных недостатков в описываемом устройстве применен следящий аппарат, снабженный перфорированной лентой, движение которой синхронизировано с движением ленты транспортера, и которая используется для управлепия сбрасывающим механизмом.
Кроме катущки с перфорированной лептой, следящий аппарат содержит пробивной механизм, матрицу, фотореле, приводное устройство, механизм автоматического отключения и пульт управления.
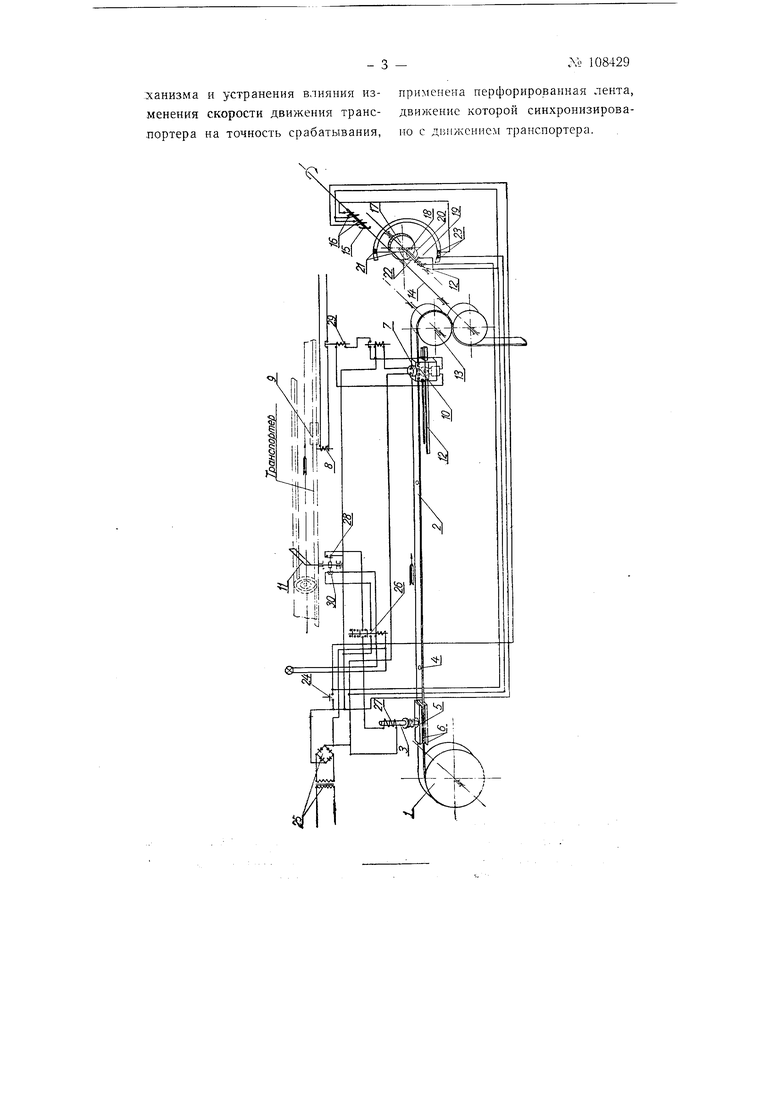
Схема предлагаемого устройства показана на чертеже.
Следящий аппарат состоит из катушки / с намотанной на нее бумажной лентой 2. Перед катущкой (по направлению движения ленты) установлен пробивной механизм 3 с электромагнитным приводом,предназначенный для пробивания отверстий 4 на движущейся ленте.
Пробивной механизм состоит из пуансона, возвратной пружины 5 и матрицы 6. служащей одновременно направляющей для ленты.
На некотором расстоянии от пробивного механизма установлено фотореле 7, которое включает электромагнит 8 сбрасывателя 9 в момент прохождения отверстия ленты над лампочкой 10, установленной под лентой. Расстояние между фотореле и пробивным механизмом является масштабной длиной расстояния от контрольного рычага // до места сбрасывания бревна. Точность сбрасывания бревен регулируется перемещением фотореле по специальным салазкам 12 с помощью микровинта.
Движение ленты 2 осуществляется приводом, состоящим из двух резиновых барабанов 13, приводного
вала J4 и муфты включения 15 с двумя электромагнитами 16, служащими для включения и выключения муфты.
Привод оборудован специальным механизмом, который автоматически выключает следящий аппарат при отсутствии на транспортере бревен, предназначенных для сброса на соответствующее место, обслул иваемое данным следящим аппаратом.
А1еханизм автоматического отк.лючения состоит из зубчатой передачи 17, муфты 18 с электромагнитом 19, пружины муфты 20, подвижного контактного мостика 21, возвратной пружины 22 и контакта 23 для отключения аппарата.
Автоматическое отключение аппарата производится нажатием на кнопку }правления 24. При этом электромагниты 16 включают муфту 15 приводного вала 14 следящего аппарата. При этом лепта 2 начинает двигаться. Одновременно, благодаря зубчатой передаче 17 и муфте 18, начинает вращаться контактный мостик 21, который дублирует движение лепты транспортера в некотором масщтабе. Исходное положение контактного мостика относительно контактов 23 рассчитано таким образом, чтобы отключение аппарата произощло по прохождении отверстия в ленте через фотореле, т. е. посяе сброса бревна с транспортера.
В случае, если на промежутке цепи транспортера между контрольным рычагом и сбрасывателем од,новременно движется несколько бревен в одно и то же место, от.ключение аппарата происходит лищь после сброса последнего бревна. Это достигается тем, что при очередном нажатии на кнопку управления 24 контактный лгостик 21 возвращается в исходное положение. Возврат мостика в исходное положение осуществляется электромагнитом 19 и возвратной пружиной 22.
Питание электрической схемы следящего аппарата . производится постоянным током напряжением 24 в, для получения которого служит выпрямитель 2S.
Следящий аппарат приводится в движение от вала рабочей звездочки транспортера через редуктор, снижающий число оборотов приводного вала аппарата до заданной величины.
Сортировка леса на транспортере, оборудованном следящим аппаратом, происходит следующим образом.
При прохождении бревна у пульта управления перед контрольным рычагом сортировщик определяет сортимент и нажимает соответствующую кнопку на пульте управления. При этом включается привод следящего аппарата, и лента начинает двигаться, а реле включения 26 автоматически подключает питание к электромагниту пробивного механизма 27. В момент упора торца бревна в контрольный рычаг // электрический ток через кнопку включения пробивного механизма 28, находящуюся на контрольном рычаге, поступает в электромагнит пробивного механизма .27, и пуапсон последнего пробивает отверстие в движун;ейся ленте. При дальнейщем движении ленты в момент прохождения отверстия через фотореле включается электромагнит сбрасывателя через промежуточное реле 29. Электромагнит пускает в ход сбрасыватель и происходит сброс бревен с транспортера.
Отключение реле включения автоматики 26 производится при обратном ходе контрольного рычага при помощи кнопки 56. Остановка следящего аппарата производится периодически механизмом отключения аппарата, описанным выще.
На чертеже показана одна секция следящего аппарата. Количество секций аппарата зависит от количества сортируемых марок, привод для которых является общим.
Предмет изобретения
Устройство для дистанционного управления сортировкой леса транспортера.ми при помощи программного механизма, отличающееся тем, что для повыщения точности срабатывания сбрасывающего ме
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для автоматического сбрасывания бревен с продольных транспортеров | 1957 |
|
SU113859A1 |
| Сплоточная машина для сплотки пучков на лесных рейдах | 1961 |
|
SU145177A1 |
| Сортировочно-сплоточная поточная линия для лесных рейдов | 1956 |
|
SU112859A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СБРАСЫВАНИЯ И ТОРЦОВКИ КРУГЛОГО ЛЕСА | 1968 |
|
SU220843A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУМЕХАНИЧЕСКОЙ СОРТИРОВКИ И ПУЧКОВОЙ СПЛОТКИ БРЕВЕН В ВОДЕ | 1949 |
|
SU88361A1 |
| Устройство для распределения перемещаемых транспортером штучных грузов по отдельным местам | 1958 |
|
SU117552A1 |
| Устройство для сортировки пиломатериалов | 1960 |
|
SU134497A1 |
| Сортировочно-сплоточное устройство | 1961 |
|
SU142958A1 |
| Устройство для сортировки круглого леса по сортиментам. | 1959 |
|
SU128367A1 |
| УСТАНОВКА ДЛЯ СОРТИРОВКИ ДРЕВЕСИНЫ | 1971 |
|
SU291853A1 |