с выходами блоков регулирования скорости приводов механизма поворота подъемной и тяговой лебедок, а выход подключен к входам блока изменения алгоритма выделения сигнала и блока изменения задания натяжения подъемных и тяговых канатов, первый и второй выходы которого соединены соответственно с входом задатчика натяжения подъемных канатов и входом задатчика натяжения тяговых канатов, а первый и второй выходы блока изменения алгоритма выделения сигнала подключены соответственно к первому входу бло ка выделения сигнала управления приводом подъемной лебедки и первому
входу блока выделения сигнала управ- ления приводом тяговой лебедки, вторые входы которых соединены соответ.ственно с выходом задатчика скорости привода подъемной лебедки и выходом задатчика скорости привода тяговой лебедки, а третьи входы блоков выделения сигналов управления соединены соответственно с выходом регулятора натяжения подъемных канатов и выходом регулятора натяжения тяговых канатов, причем выходы блоков выделения сигналов управления приводов подьем. ной и тяговой лебедок подключены к соответствующим входам.блоков регулирования скорости подъемной и тяговой лебедо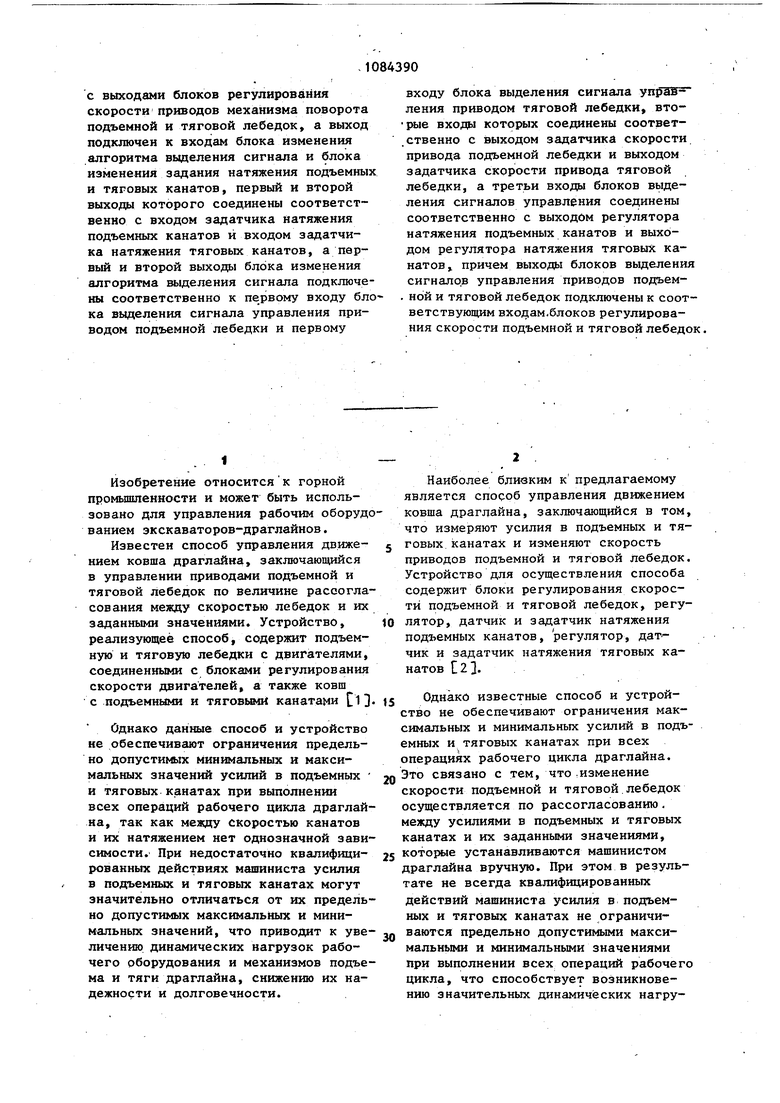


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1425276A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2283927C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |

1. Способ управления движением ковша драглайна, включающий измерение усилий в подъемных и тяговых канатах и изменение скорости приводов подъемной и тяговой тебедок, о т.личайщийся тем, что, с целью повьшения надежности и долговечности рабочего оборудования и механизмов драглайна за счет ограничения динамических нагрузок путем автоматической коррекции действий машиниста, дополнительно задают управляющие воздействия по скорости приводов подъемной и тяговой лебедок, распознают вы -----1; / полняемую операцию рабочего цикли, згщают предельно допустимые макси мальные или минимальные усилия в . подъемных и тяговых канатах в зависимости от выполняемой операции рабочего цикла, по величине рассогласования между усилиями в подъемных и тяговых канатах и их заданными значениями формируют управляющие воздействия, которые сравнивают с заданными управляющими воздействиями по скорости приводов подъемной и тяговой лебедок, в зависимости от выполняемой операции рабочего цикла выделяют из сравниваемых максимальные или минимальные управляющие воздействия, которые подают на входы приводов подъемной и тяговой лебедок. (Л 2. Устройство для управления движением ковша драглайна, содержащее блоки регулирования скорости подъемной и тяговой лебедок, датчик и задатчик натяжения подъемных канатов, подключенные к входам регулятора натяжения подъемных канатов, 00 4 СО СО и задатчик натяжения тяговых канатов, подключенные к входам регулятора натяжения тяговых канатов, о т л и чающееся тем, что оно снабжено задатчиками скорости приводов подъемной и тяговой лебедок, блоком регулирования скорости привода поворота, блоком вьщеления сигнала управления приводом подъемной лебедки, блоком выделения сигнала управления приводом тяговой лебедки, блоком изменения алгоритма выделения сигнала, блоком изменения задания натяжения подъемных и тяговых канатов и блоком распознавания операций рабочего цикла драглайна, выходы которого соединены
Изобретение относится к горной промышленности и может быть использовано для управления рабочим оборудованием экскаваторов-драглайнов.
Известен способ управления движением ковша драглайна, заключающийся в управлении приводами подъемной и тяговой лебедок по величине рассогласования между скоростью лебедок и их заданными значениями. Устройство, реализующее способ, содержит подъемную и тяговую лебедки с двигателями, соединенными с блоками регулирования скорости двигателей, а также ковш с подъемными и тяговюш канатами ClD
Однако данные способ и устройство не обеспечивают ограничения предельно допустимых минимальных и максимальных значений усилий в подъемных и тяговых канатах при выполнении всех операций рабочего цикла драглайна, так как между скоростью канатов и их натяжением нет однозначной зависимости. При недостаточно квалифицированных действиях машиниста усилия в подъемных и тяговых канатах могут значительно отличаться от их предельно допустимых максимальных и минимальных значений, что приводит к увеличению динамических нагрузок рабочего оборудования и механизмов подъема и тяги драглайна, снижению их надежности и долговечности.
Наиболее бливким к предлагаемому является способ управления движением ковша драглайна, заключающийся в том что измеряют усилия в подъемных и тя5 говых канатах и изменяют скорость приводов подъемной и тяговой Лебедок Устройство для осуществления способа содержит блоки регулирования скорости подъемной и тяговой лебедок, регу10 лятор, датчик и задатчик натяжения подъемных канатов, регулятор, датчик и задатчик натяжения тяговых канатов С 2}.
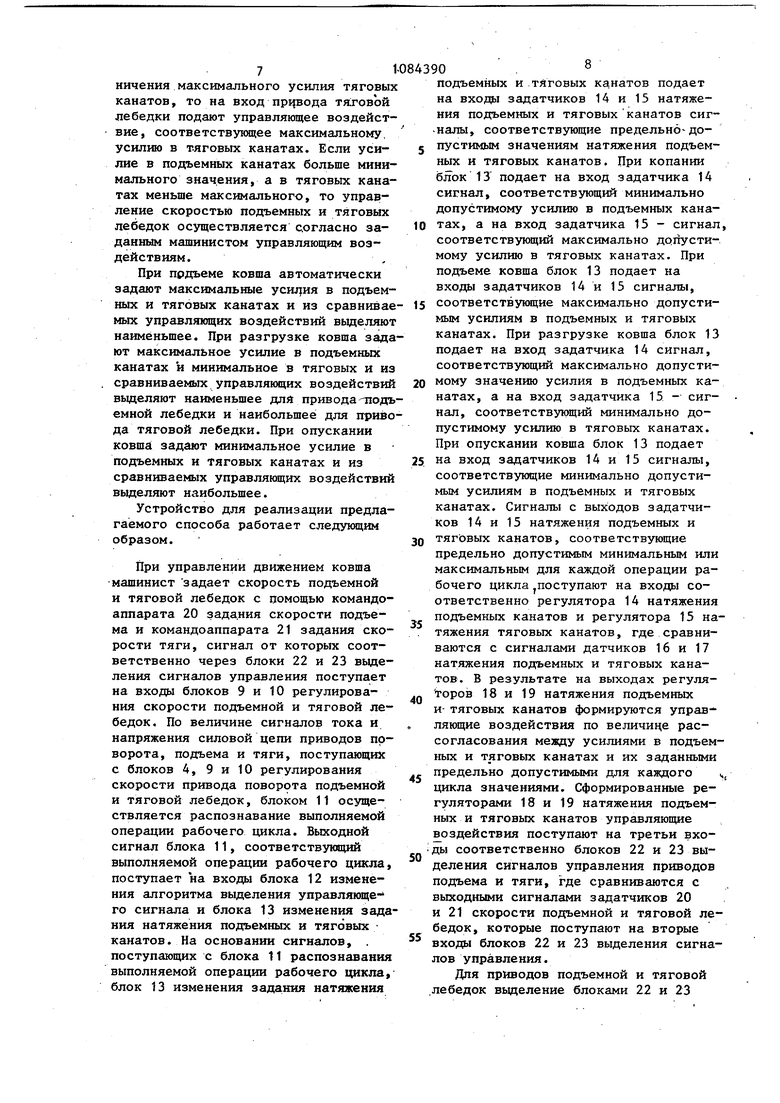
,5 Однако известные способ и устройство не обеспечивают ограничения максимальных и минимальных усилий в подъемных и тяговых канатах при всех операциях рабочего цикла драглайна. 20 Это связано с тем, что .изменение скорости подъемной и тяговой лебедок осуществляется по рассогласованию. между усилиями в подъемных и тяговых канатах и их заданными значениями, 25 которые устанавливаются машинистом драглайна вручную. При этом в результате не всегда квалифицированных действий машиниста усилия в подъемных и тяговых канатах не ограничиJQ ваются предельно допустимыми максимальными и минимальными значениями При выполнении всех операций рабочег цикла, что способствует возникновению значительных динамических нагрузок в рабочем оборудовании и механиз мах подъема и тяги драз лайна. Цель изобретения - повьшение надежности и долговечности рабочего оборудования и механизмов драглайна за счет ограничения динамическихнагрузок путем автоматической коррекции действий машиниста. Указанная цель достигается тем, что согласно способу управления дниже:нием ковша драглайна, дополнительно задают управляющие воздействия по cKopotTH. приводов подъемной и тяговой лебедок, распознают выполняемую операцию рабочего цикла, задают предельно допустимые максимальные или минимальные усилия в подъемных и тяговых канатах в зависимости от выпол няемой операции рабочего цикла, по в6:личине рассогласования меяуду усиЛИЯМИ в подъемных и тяговых канатах и их заданными предельными значениями формируют управляющие воздействия которые сравнивают с заданными управ ляющими воздействиями по скорйсти приводов подъемной и тяговой лебедок в зависимости от выполняемой операци рабочего цикла выделяют из сравнивае мых максимальные или минимальные управляющие воздействия, которые подают на входы приводов подъемной и тяговой лебедок. Указанная цель достигается такл тем, что устройство для осуществлени способа снабжено задатчиками скороети приводов подъемной и тяговой лебедок, блоком регулирования скорости привода поворота, блоком выделения сигнала управления приводом подъемно лебедки, блоком вьщеления сигнала уп равления приводом тяговой лебедкй, блоком Изменения алгоритма выделения сигнала, блоком изменения задания натяжения подъемных и тяговых кана тов и блоком распознавания операций рабочего цикла драглайна, входы ко торого соединены с выходами блоков регулирования скорости приводов меха низма поворота, подъемной и тягов/зй лебедок, а выход подключен к входам блока изменения алгоритма выделения сигнала и блока изменения задания натяжения подъемных и тяговых канатов, первый и второй выходы соединены соответственно с входом задатчика натяжения подъемных канатов и входом задатчика натяжения тяговых канатов, а первый и второй выходы блока изменения алгоритма выделения сигнала подключены соответственно к первому входу блока выделения сигнала управления приводомподъемной лебедки и первому входу блока выделения сигнала управления приводом тяговой лебедки, вторые входы которых соединены соответственно с выходами задатчика скорости привода подъемной лебедки и выходом задатчика скорости привода тяговой лебедки, а третьи входы блоков выделения сигналов управления соединены соответственно с выходом регулятора натяжения подъемных канатов и выходом регулятора натяжения тяговых канатов, причем выходы блоков вьщеления сигналов управления приводов подъемной и тяговой лебедок подключены к соответствующим входам блоков регулирования скорости подъемной и тяговой лебедок. На фиг. t представлена блок-схема устройства; на фиг, 2 - графическое изображение области допустимых предельных значений усилий натяжения подъемных и тяговых канатов драглайна при выполнении операций рабочего цикла. Устройство содержит ковш 1 с подъемнад и 2 и тяговыми 3 канатами, блок 4 регулирования скорости приво- да поворота, подъемную 5 и тяговую 6 лебедки с двигателями 7 и 8 приводов подъема и тяги, подключенньгх к блокам 9 и 10 регулирования скорости подъемной и тяговой лебедок. Блоки 9 и 10, и блок 4 соединены с входами блока 11 распознавания операций рабо- . чего 1щкла драглайна, который может быть выполнен в виде устройства и,змеряющего и сравнивающего величины напряжений и токов якорных цепей приводов подъема, тяги и поворота, так как каадая из этих операций характеризуется определенными величинами напряжений и токов указанных приводов ГЗ 3. Выход блока 11 подключен к входу блока 12 изменения алгоритма выделения сигнала, представляющего собой релейный блок, в котором в зависимости от сигнала с блока 11 срабатывает определенная группа реле, ,и к входу блока 13 изменения задания натяжения подъемных и.тяговых канатов, выполненного в виде источника опорного напряжения, величина которого изменяется в зависимости от сигнала с блока 11, первый выход которого соединен с входом задатчика 14 натяжения подъемных канатов, а второй - с входом задатчика 15 натяжения тяговых канатов. Выходы задатчиков 14 и 15 и датчиков 16 и 17 натяжения подъемных и тяговых канатов подключены к соответствующим входам регуляторов 1 и 19 натяжения подъемных и тяговых канатов, вйходы которых и выходы задатчиков 20 и 21 скорости подъемной и тяговой лебедок подключены к х:ортветствующим третьим и вторым входам блоков 22 и 23 вьщеления сигналов управления хфиводов подъемных и тяго вых лебедок, выполненных в виде диод ных схем (с опорным напряжением) выдел ния наибольшего или наименьшего сигнала, первые входы которых соединены соответственно с первым и вторым выходом блока 12, при переключеНИИ контактов которого изменяется алгоритм выделения наибольшего или наименьшего сигнала в блоках 22 и 2: выходы которых подключены к соответствующим входам блоков 9 и 10 регулирования скорости подъемной и тяговой лебедок. Способ управления движением ковша драглайна осуществляют следующим образом. Для каждой операции рабочего цикла драглайна с целью снижения динамических нагрузок его рабочего оборудования и механизмов обеспечиваются следующие условия ограничения усилий натяжения подъемных S п и тяговых ST канатов: - - VSptT o. Копание П п min Подъем тал Разгрузка motx Опускание min-,, Для обеспечения движения ковша драглайна машинист задает управляющие воздействия по скорости приводов подъемной и тяговой лебедок. При движении ковша изменяют усилия в подъемных и тяговых канатах и (распознают; выполняемую операцию рабочего цикла, в зависимости от которой автоматически задают максимальные или минимальные усилия в подъемных и тяговых канатах. По величине рассогласования между усилия ми в подъемных и тяговых канатах и их предельными заданными значениями max формируют управляющие воздействия для приводов подъема и тяги, которые сравнивают с заданными управляющими воздействиями по скорости приводов подъема и тяги. В зависимости от выполняемой операции рабочего цикла выделяют из сравниваемы х управляю1цих воздействий максимальные или минимальные, которые соответственно подают на входы приводов подъемной или тяговой лебедок, для изменения их скорости. При зтом усилия в подъемных и тяговых канатах ограничены предельно допустимыми максимальными или минимальными значениями. Например, распознав операцию (копание), для обеспечения ограничения минимального натяжения подъемных канатов ( и максимального натяжения тяговых канатов (S.S ) -автоматически задают минимальное усилие в подъемных канатах и максимальное в тяговых. Измеряют усилия в подъемных и тяговых канатах и формируют управляющие воздействия для. приводов подъемной и тяговой лебедок, соответствующие минимальному усилию в подъемных канатах и максимальному в тяговых. Полученные управляющие воздействия сравнивают соответственно с заданными машинистом управляющими воздействиями по скорости привода подъемной нГ тяговой лебедок. Для привода подъемной -лебедки из сравниваемых управляющих воздействий выделяют наибольшее и подают на его вход, а для привода тяговой лебедки из сравниваемых управляющих воздействий вьщеляют наии подают на вход этого применьшеевода. Таким образом, если машинист при опании задает управляющее воздейстие по скорости подъемной лебедки еньше, чем то, которое необходимо ля ограничения (поддержания) миниального натяжения подъемных канатов, о на вход привода подъемной лебедки одают управлянм(ее воздействие, соотетствующее минимальному усилию в одъемных канатах, под действием коорого скорость подъемной лебедки зменяется и усилие в подъемных канаах ограничивается предельно допустиой минимальной величиной. Если машиист при копании задает управляющее воздействие по скорости тяговой лебедки больше необходимого для ограничения максимального усилия тяговых канатов, то на вход привода тяговой лебедки подают управляющее воздействие, соответствукнцее максимальному, усилию в тяговых канатах. Бели усилие в подъемных канатах больше минимального значения, а в тяговых канатах меньше максимального, то управление скоростью подъемных и тяговых лебедок осуществляется согласно заданным машинистом управляющим воздействиям. При прдьеме ковша автоматически задают максимальные в подъемных и тяговых канатах и из сравнивае мых управляющих воздействий вьщеляют наименьшее. При разгрузке ковша зада ют максимальное усилие в подъемных канатах и минимальное в тяговых и из сравниваемых управляющих воздействий вьщеляют наименьшее дли привода подъ емной лебедки и наибольшее для приво да тяговой лебедки. При опускании ковша задают минимальное усилие в подъемных и тяговых канатах и из сравниваемых управляющих воздействий вьщеляют наибольшее. Устройство для реализации предлагаемого способа работает следующим образом. При управлении движением ковша машинист задает скорость подъемной и тяговой лебедок с помощью командоаппарата 20 задания скорости подъема и командоаппарата 21 задания скорости тяги, сигнал от которых соответственно через блоки 22 и 23 вьщеления сигналов управления поступает на входы блоков 9 и 10 регулирования скорости подъемной и тяговой лебедок. По величине сигналов тока и напряжения силовой цепи приводов поворота, подъема и тяги, поступающих с блоков 4, 9 и 10 регулирования скорости привода поворота подъемной и тяговой лебедок, блоком 11 осуществляется распознавание выполняемой операции рабочего цикла. Выходной сигнал блока 11, соответствукшщй выполняемой операции рабочего цикла, поступает на входы блока 12 изменения алгоритма выделения управляюще- го сигнала и блока 13 изменения зада ния натяжения подъемных и тяговых канатов. На основании сигналов, . поступающих с блока 11 распознавания выполняемой операции рабочего цикла, блок 13 изменения зада.ния натяжения 0 подъемных и .тяговых канатов подает на входы задатчиков 14 и 15 натяжения подъемных и тяговых канатов сигналы, соответствующие предельно-допустимьм значениям натяжения подъемных и тяговых канатов. При копании блок 13 подает на вход задатчика 14 сигнал, соответствующий минимально допустимому усилию в подъемных канатах, а на вход задатчика 15 - сигнал, соответствукнций максимально допустимому усилию в тяговых канатах. При подъеме ковша блок 13 подает на входы задатчиков 14 и 15 сигналы, соответствующие максимально допустимым усилиям в подъемных и тяговых канатах. При разгрузке ковша блок 13 подает на вход задатчика 14 сигнал, соответствующий максимально допустимому значению усилия в подъемных канатах, а на вход задатчика 15 - сигнал, соответствующий минимально допустимому усилию в тяговых канатах. При опускании ковша блок 13 подает на вход задатчиков 14 и 15 сигналы, соответствукицие минимально допустимым усилиям в подъемных и тяговых канатах. Сигналы с выходов задатчиков 14 и 15 натяжения подъемных и тягЬвых канатов, соответствующие предельно допустимым минимальным или максимальным для каждой операции рабочего цикла поступают на входы соответственно регулятора 14 натяжения подъемных канатов и регулятора 15 натяжения тяговых канатов, где сравниваются с сигналами датчиков 16 и 17 натяжения подъемных и тяговых канатов. В результате на выходах регуляторов 18 и 19 натяжения подъемных и- тяговых канатов формируются управляющие воздействия по величине рассогласования мелщу усилиями в подъемных и тяговых канатах и их заданными предельно допустимыми для каждого ц цикла значениями. Сформированные регуляторами 18 и 19 натяжения подъемных и тяговых канатов управляющие воздействия поступают на третьи входы соответственно блоков 22 к 23 выделения сигналов управления приводов подъема и тяги, где сравниваются с выходными сигналами задатчиков 20 и 21 скорости подъемной и тяговой лебедок, которые поступают на вторые входы блоков 22 и 23 выделения сигналов управления. Для приводов подъемной и тяговой лебедок вьщеление блоками 22 и 23 наибольшего или наименьшего управляницего воздействия осуществляется в зависимости от выполняемой операции рабочего цикла. Для этого на пер вые (управляняцие) входы блоков 22, я 23 выделения сигналов управления подаются сигнш0 1 с выходов блока 12 изменения алгоритма ввделения сигнала. Выходйой сигнал блока 12, соединеййого с блоком 11 распознавания выполняемой операции рабочего цикла соответствует требуемому алгоритоу вьщеления сигналов для блоков 22 и 23. При копании на основании сигна лов , поступакйцих с выхода блока 11, для привода подъемной лебедки блоками 22 обеспечивается выделение наибольшего из сравниваемых сигналов управления (с выходов задатчика 20 и регулятора 18), а для привода тяговой лебедки блоком 23 обеспечивается выделение наименьшего из сравни ваемых сигналов управления (с выходов задатчика 21 и регулятора 19). При подъеме ковша блоки 22 и 23 вьще :ления сигнала управления.обеспечи;йают выделение из сравниваемых управ ляющих воздействий наименьшего, как для привода подъемной, так и для при вода тяговой лебедок. При разгрузке ковша обеспечивается выделение наименьшего управляющего воздействия для привода подъемной лебедки и наибольшего управлякндего воздействия для привода Тяговой лебедки. При опускании ковша обеспечивается вьще ление наибольшего управлякщего воздействия как для привода подъемной, так и для привода тяговой лебедок. Наделенные блоками 22 и 23 сигналы управления подаются соответственно на входы блоков 9 и 10 регулирования скорости подъемной и тяговой лебёдок. При 3том скорости подъемной и тяговой лебедок изменяются таким образом, чтобы усилия в подъемных и тяговых канатах ограничивались 9010 для каждой операции рабочего цикла предельно допустимыми максимальными или минимальными значениями, так .как при пЬпадании ковша на границу области допустимых усилий в подъемных и тяговых канатах (в результате недостаточно квалифицированных действий машиниста или вследствие влияния на его работу плохих погодных и сложных горно-геологических условий) блоки 22 и 23 автоматически отключают от входов блоков 9 и 10 регулирования скорости подъемной и тяговой лебедок сигналы с выходов задатчиков 20 и 21 скорости лебедок и подключают вместо них сигналы с выходов регуляторов 18 и 19 натяжения подъемных и тяговых канатов, под действием которых обеспечивается стабилизация предельно допустимых усилий в подъемных и тяговых канатах для каждой операции рабочего цикла. Устройство для управления движением ковша драглайна может быть реализовано на элементах унифицированной блочной системы регуляторов на интегральных микросхемах. В качестве задатчиков скорости приводов подъемной и тяговой лебедок могут быть использованы сельсинные командоаппараты, применяемые на драглайне. Таким образом, предлагаемый способ управления движением ковша драглайна и устройство для его осуществления позволяют ограничивать предельно допустимые максимальные или минимальные усилия в подъемных и тяговых канатах путем автоматической коррекции действий машиниста.при управлении движением ковша драглайна. Применение предлагаемого способа и устройства упрг вления позволяет снизить динамические нагрузки на ра- ; бочее оборудование и механизмы драглайна, увеличить его надежность и долговечность, а также облегчить управление экскаватором.
Ж
Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| , Седаков Л.Б | |||
| Наладка электроприводов , экскаваторов | |||
| М., Недра, 1975 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Автоматическое управление технологическими процессами карьеров | |||
| М., Недра, 1978. | |||
