Изобретение относится к горной промышленности и может быть использовано для управления движением ковша драглайна при копании.
Известно устройство для управления движением ковша экскаватора-драглайна, содержащее датчик и задатчик натяжения подъемных канатов, а также функциональный преобразователь сигнала датчика натяжения тяговых канатов, которые подключены ко входам регулятора натяжения подъемных канатов, формирующего управляющее воздействие для блока регулирования скорости подъемной лебедки [1].
Недостатком этого устройства является то, что в нем не предусмотрено воздействие на блок регулирования скорости тяговой лебедки для регулирования натяжения тяговых канатов, что приводит к возможности перегрузок рабочего оборудования и механизмов подъема и тяги драглайна, снижению их надежности и долговечности.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для управления движения ковша драглайна при копании, содержащее двигатели подъемной и тяговой лебедок, управляемые блоками регулирования скорости этих лебедок, датчик пути копания, выход которого через программный задатчик натяжения тяговых канатов подключен к одному из входов регулятора натяжения тяговых канатов, к другому входу - датчик натяжения тяговых канатов, а выход регулятора соединен с первым входом регулятора натяжения подъемных канатов, второй вход последнего - с выходом датчика натяжения подъемных канатов, при этом выход регулятора натяжения подъемных канатов подключен ко входу блока регулирования скорости подъемной лебедки [2]. Устройство позволяет автоматизировать управление электроприводом подъема драглайна и снизить динамические нагрузки его рабочего оборудования путем регулирования натяжения подъемных канатов. При этом для компенсации возрастающего веса ковша при перемещении его по забою и обеспечения постоянной толщины срезаемой ковшом стружки грунта натяжение в подъемных канатах увеличивается с учетом длины пути копания и усилия в тяговых канатах. Это устройство взято нами в качестве прототипа.
Недостатком данного устройства является то, что в нем не учитывается нелинейная зависимость изменения веса ковша от пути копания. Принятая в известном устройстве линейная зависимость заданного натяжения тяговых канатов от пути копания приводит к линейному изменению выходного сигнала регулятора натяжения тяговых канатов. Так как выходной сигнал этого регулятора является задающим для регулятора натяжения подъемных канатов, то изменение натяжения подъемных канатов, обеспечивающее компенсацию возрастающего веса ковша для поддержания постоянной толщины срезаемой ковшом стружки грунта, также происходит по линейной зависимости от пути копания. В результате чего снижается точность регулирования толщины стружки грунта, что приводит либо к чрезмерному заглублению ковша в грунт и перегрузкам рабочего оборудования и механизмов драглайна, снижающим их надежность и долговечность, либо к недостаточному заглублению ковша в грунт, увеличению времени копания и снижению производительности экскаватора-драглайна.
Кроме того, в известном устройстве не предусмотрено воздействие регулятора натяжения тяговых канатов на блок регулирования скорости тяговой лебедки, обеспечивающее снижение динамических нагрузок в рабочем оборудовании и механизмах драглайна. Управление блоком регулирования скорости в известном устройстве осуществляет машинист вручную. При его недостаточно квалифицированных действиях возникают перегрузки рабочего оборудования и механизмов подъема и тяги драглайна.
Задача изобретения - повышение надежности и долговечности рабочего оборудования и механизмов экскаватора-драглайна путем снижения возникающих в них динамических нагрузок за счет повышения точности регулирования толщины срезаемой ковшом стружки грунта.
Это достигается тем, что устройство для управления движением ковша драглайна при копании, содержащее двигатели подъемной и тяговой лебедок, управляемые блоками регулирования скорости этих лебедок, датчик пути копания, выход которого через программный задатчик натяжения тяговых канатов подключен к одному из входов регулятора натяжения тяговых канатов, к другому входу - датчик натяжения тяговых канатов, а выход регулятора соединен с первым входом регулятора натяжения подъемных канатов, второй вход последнего - с выходом датчика натяжения подъемных канатов, при этом выход регулятора натяжения подъемных канатов подключен ко входу блока регулирования скорости подъемной лебедки, снабжено дополнительным регулятором натяжения тяговых канатов с программным задатчиком натяжения тяговых канатов, вход которого соединен с выходом датчика пути копания, а его выход и выход датчика натяжения тяговых канатов подключены ко входам дополнительного регулятора натяжения тяговых канатов, при этом выход последнего соединен со входом блока регулирования скорости тяговой лебедки.
На фиг.1 представлена блок-схема предложенного устройства.
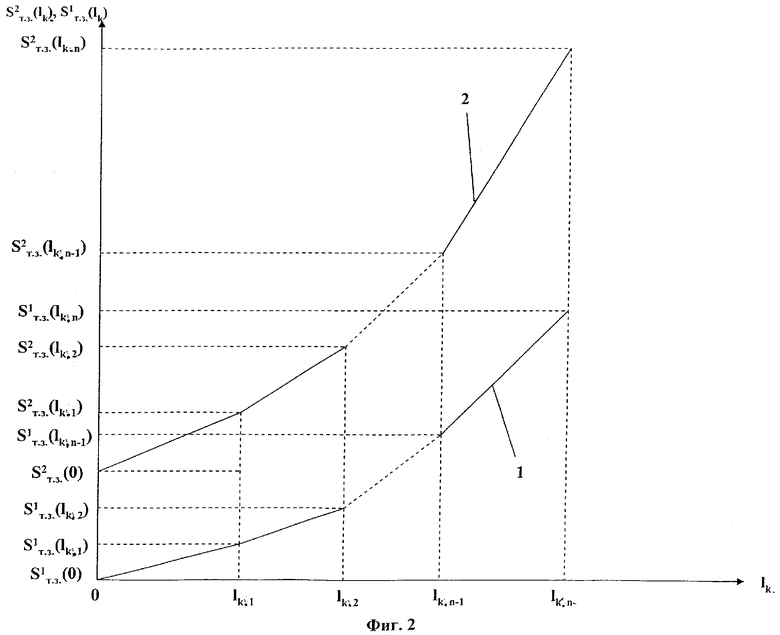
На фиг.2 показаны характеристики программных задатчиков.
Устройство состоит из рабочего оборудования драглайна в виде ковша 1 с подъемными и тяговыми канатами 2 и 3, подъемной и тяговой лебедок 4 и 5, механически связанных с двигателями 6 и 7 этих лебедок, которые управляются блоками 8 и 9 регулирования скорости указанных двигателей. Двигатель 7 тяговой лебедки соединен с датчиком 10 пути копания, выход которого через основной и дополнительный программные задатчики 11 и 12 натяжения тяговых канатов подключен к первым входам соответственно основного и дополнительного регуляторов 13 и 14 натяжения тяговых канатов, вторые входы которых соединены с выходом датчика 15 натяжения этих канатов. Выход основного регулятора 13 натяжения тяговых канатов подключен к первому входу регулятора 16 натяжения подъемных канатов, ко второму входу которого подключен датчик 17 натяжения этих канатов. При этом выход дополнительного регулятора 14 натяжения тяговых канатов соединен со входом блока 9 регулирования скорости тяговой лебедки, а выход регулятора 16 натяжения подъемных канатов - со входом блока 8 регулирования скорости подъемной лебедки. Каждый из программных задатчиков 11, 12 может быть выполнен в виде сумматора, на вход которого включены блоки формирования нелинейности типа «зона нечувствительности». Установка начального значения выходного сигнала каждого задатчика 11 или 12 осуществляется с помощью отдельного потенциометра. Регулятор 13 натяжения тяговых канатов может быть выполнен в виде однополярного ПИД-регулятора с инвертированием входного сигнала. Дополнительный регулятор 14 натяжения тяговых канатов может быть выполнен в виде ПИД-регулятора с задатчиком начального натяжения подъемных канатов.
Устройство работает следующим образом.
Вначале задают программы натяжения тяговых канатов в зависимости от пути копания, формируемых основным и дополнительным программными задатчиками соответственно 11 и 12. С целью учета нелинейности изменения веса ковша от пути копания, для компенсации его возрастающего веса и поддержания постоянной величины срезаемой ковшом стружки грунта, выходные сигналы программных задатчиков 11 и 12 натяжения тяговых канатов изменяются по нелинейной зависимости от величины длины участков пути копания. Начальное значение выходного сигнала основного программного задатчика 11 натяжения тяговых канатов устанавливают равным нулю для того, чтобы величина выходного сигнала регулятора 16 подъемных канатов в начале копания соответствовала его начальной заданной величине. Под действием этого сигнала устраняется слабина в подъемных канатах. Нулевое значение выходного сигнала программного задатчика 11 натяжения тяговых канатов в начале процесса копания обеспечивает требуемое заглубление ковша в грунт. Максимальное значение выходного сигнала задатчика 11 в конце копания должно обеспечить величину выходного сигнала основного регулятора 13 натяжения тяговых канатов, при которой регулятор 16 натяжения подъемных канатов обеспечит величину их натяжения, достаточную для обхода груженым ковшом труднопреодолимого препятствия. При выборе начального значения выходного сигнала дополнительного программного задатчика 12 натяжения тяговых канатов исходят из условия преодоления ковшом сил сопротивления резания грунта. В зависимости от категории разрабатываемого грунта это усилие может быть принято равным Ррез=(0,2...0,3)Sт.ст, а максимальное значение выходного сигнала дополнительного задатчика 12 должно быть близким к величине стопорного усилия Sт.ст.. Промежуточные значения выходных сигналов основного программного задатчика 11 натяжения тяговых канатов в зависимости от длины пути копания формируют в соответствии со следующим выражением:

Промежуточные значения выходных сигналов дополнительного программного задатчика 12 натяжения тяговых канатов в зависимости от длины пути копания формируют в соответствии со следующим выражением:

В выражении (1) и (2) принятые обозначения соответствуют следующие параметрам:
S1 т.з, S2 т.з - заданное натяжение тяговых канатов, формируемое задатчиками 11 и 12;
S1 т.з.(0), S2 т.з.(0) - начальное заданное натяжение тяговых канатов, формируемое задатчиками 11 и 12;
к1 1, к1 2, к2 1, к2 2,..., кn 1, кn 2 - коэффициенты крутизны характеристик S1 тз(lк.), и S2 тз(lк.) задатчиков 11 и 12 натяжения тяговых канатов, характеризующие интенсивность приращения усилия в тяговых канатах на различных участках пути копания;

lk - текущее значение длины пути копания;
 - величины длин пути копания, при которых происходит изменение крутизны характеристик S1 т.з.(lк.), и S2 т.з.(lк.);
- величины длин пути копания, при которых происходит изменение крутизны характеристик S1 т.з.(lк.), и S2 т.з.(lк.);
 - конечное значение заданного пути копания Lk.
- конечное значение заданного пути копания Lk.
Lk=(2,..., 5)lков. - заданный путь копания, зависящий от категории разрабатываемых грунтов (lков. - длина ковша);
n - число участков пути копания, определяемое заданной точностью регулирования толщины стружки грунта.
На фиг.2 характеристика 1 соответствует выходному сигналу основного программного задатчика 11, а характеристика 2 - выходному сигналу дополнительного программного задатчика 12 натяжения тяговых канатов.
После опускания ковша на поверхность забоя и при отсутствии его перемещения по забою выходные сигналы программного задатчика 11 и регулятора 13 натяжения тяговых канатов равны нулю. Происходит заглубление ковша в грунт под действием его собственного веса. Регулятор 14 натяжения тяговых канатов формирует сигнал задания для блока 9 регулирования скорости тяговой лебедки. Под действием этого сигнала начинается перемещение ковша по забою. При этом на выходе датчика 10 пути копания появляется сигнал, поступающий на входы основного и дополнительного программных задатчиков 11 и 12 натяжения тяговых канатов. Основной программный задатчик 11 формирует сигнал задания для регулятора 13 натяжения тяговых канатов, выходной сигнал которого зависит от величины рассогласования s между заданным и фактическим усилием натяжения тяговых канатов:
е=U11-Ul5=S1 mз-ST, где:
U11=Sтз. - напряжение на выходе задатчика 11 натяжения тяговых канатов, соответствующее заданному натяжению тяговых канатов;
U15=ST - напряжение на выходе датчика 15 натяжения тяговых канатов, соответствующее фактическому усилию в тяговых канатах.
Заглубление ковша в грунт и регулирование срезаемой ковшом стружки грунта осуществляют путем изменения натяжения подъемных канатов на основании выходного сигнала регулятора 13 натяжения тяговых канатов. Его выходное напряжение изменяется таким образом, чтобы обеспечить сигнал задания на входе регулятора 16 натяжения подъемных канатов, при котором величина усилия их натяжения может быть большей или равной величине, обеспечивающей устранение слабины в подъемных канатах. Если усилие в тяговых канатах становится больше заданного значения, т.е. ST>Sl tз, что возможно при увеличении заглубления ковша в грунт и увеличении срезаемой ковшом стружки грунта, то регулятор 13 натяжения тяговых канатов формирует управляющее воздействие, под действием которого регулятор 16 натяжения подъемных канатов обеспечивает увеличение их натяжения и уменьшение толщины срезаемой ковшом стружки грунта. Если заглубление ковша в грунт недостаточно, т.е. ST>Sl tз, то выходное напряжение регулятора 13 натяжения тяговых канатов принимает значение, при котором сигнал задания на входе регулятора 16 натяжения подъемных канатов обеспечивает величину их натяжения достаточную только для устранения в них слабины. В результате уменьшения натяжения подъемных канатов увеличивается заглубление ковша в грунт и толщина срезаемой ковшом стружки грунта.
Дополнительный программный задатчик 12 натяжения тяговых канатов формирует сигнал задания для регулятора 14 натяжения тяговых канатов. В зависимости от пути копания происходит увеличение этого сигнала и возрастание сигнала на выходе регулятора 14 натяжения тяговых канатов и на входе блока 9 регулирования скорости тяговой лебедки. Это позволяет увеличивать усилие в тяговых канатах, что обеспечивает преодоление возрастающего сопротивления грунта копанию, обусловленного увеличение сил трения наполняемого ковша о грунт и сил сопротивления перемещению призмы волочения и грунта в ковше.
При чрезмерном заглублении ковша в грунт или встрече ковша с труднопреодолимым препятствием происходит увеличение натяжения в тяговых канатах, приводящее к увеличению выходного сигнала датчика 15 натяжения тяговых канатов и уменьшению выходного сигнала дополнительного регулятора 14 натяжения тяговых канатов. Этот сигнал является задающим сигналом для блока 9 регулирования скорости тяговой лебедки. Поэтому уменьшение выходного сигнала регулятора 14 натяжения тяговых канатов приводит к уменьшению скорости тягового механизма, что обеспечивает уменьшение динамических нагрузок этого механизма при встрече ковша с труднопреодолимым препятствием. Одновременно с этим регулятор 13 натяжения тяговых канатов формирует сигнал задания для регулятора 16 натяжения подъемных канатов, вызывающий увеличение натяжения этих канатов, а следовательно, уменьшение толщины срезаемой ковшом стружки грунта или обход ковшом труднопреодолимого препятствия. Толщина срезаемой ковшом стружки грунта будет поддерживаться на заданном уровне.
Предложенное устройство обеспечивает регулирование натяжения подъемных тяговых канатов по нелинейным зависимостям от длины пути копания, что позволяет повысить точность поддержания заданной толщины срезаемой ковшом стружки грунта, снизить динамические нагрузки рабочег оборудования и механизмов экскаватора - драглайна в процессе копания.
Таким образом, предложенное устройство позволяет повысить надежность и долговечность рабочего оборудования и механизмов экскаватора - драглайна за счет снижения в них возникающих в них динамических нагрузок.
Источники информации
1. Авт. свидетельство №1313962 по кл. E02F 3/48, Бюл. №20, 87.
2. Авт. свидетельство №1333745 по кл. E02F 9/20, Бюл. №32, 87 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2011 |
|
RU2457295C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2283927C1 |
| Способ управления движением ковша драглайна при копании и устройство для его осуществления | 1986 |
|
SU1333745A1 |
| Устройство для управления движением ковша драглайна | 1973 |
|
SU540014A1 |
| Устройство автоматического управления процессом копания драглайна | 1982 |
|
SU1063950A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
Изобретение относится к горной промышленности. Техническим результатом является повышение точности регулирования толщины срезаемой ковшом драглайна стружки грунта. Для этого устройство содержит двигатели подъемной и тяговой лебедок, управляемые блоками регулирования скорости этих лебедок, датчик пути копания, выход которого через программный задатчик натяжения тяговых канатов подключен к одному из входов регулятора натяжения тяговых канатов, к другому входу - датчик натяжения тяговых канатов, а выход регулятора соединен с первым входом регулятора натяжения подъемных канатов, второй вход последнего с выходом датчика натяжения подъемных канатов. При этом выход регулятора натяжения подъемных канатов подключен ко входу блока регулирования скорости подъемной лебедки. Устройство снабжено дополнительным регулятором натяжения тяговых канатов с программным задатчиком натяжения тяговых канатов, вход которого соединен с выходом датчика пути копания, а его выход и выход датчика натяжения тяговых канатов подключены ко входам дополнительного регулятора натяжения тяговых канатов. При этом выход последнего соединен со входом блока регулирования скорости тяговой лебедки. 2 ил.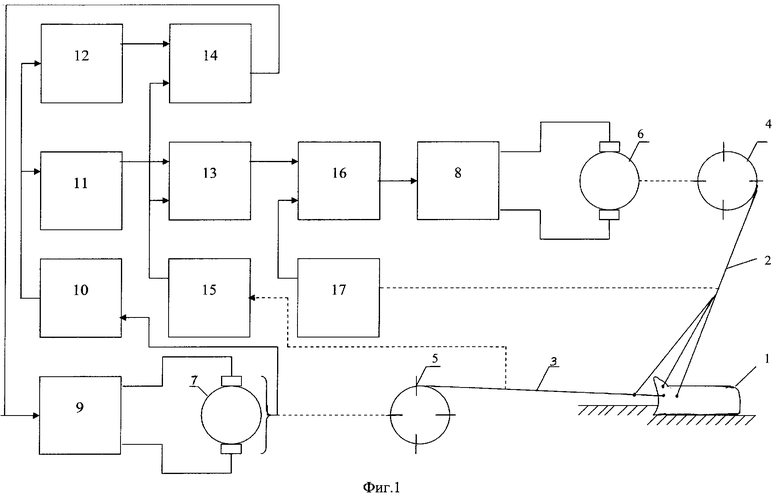
Устройство для управления движением ковша драглайна при копании, содержащее двигатели подъемной и тяговой лебедок, управляемые блоками регулирования скорости этих лебедок, датчик пути копания, выход которого через программный задатчик натяжения тяговых канатов подключен к одному из входов регулятора натяжения тяговых канатов, к другому входу - датчик натяжения тяговых канатов, а выход регулятора соединен с первым входом регулятора натяжения подъемных канатов, второй вход последнего - с выходом датчика натяжения подъемных канатов, при этом выход регулятора натяжения подъемных канатов подключен ко входу блока регулирования скорости подъемной лебедки, отличающееся тем, что оно снабжено дополнительным регулятором натяжения тяговых канатов с программным задатчиком натяжения тяговых канатов, вход которого соединен с выходом датчика пути копания, а его выход и выход датчика натяжения тяговых канатов подключены ко входам дополнительного регулятора натяжения тяговых канатов, при этом выход последнего соединен со входом блока регулирования скорости тяговой лебедки.
| Способ управления движением ковша драглайна при копании и устройство для его осуществления | 1986 |
|
SU1333745A1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| 1979 |
|
SU825784A1 | |
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2283927C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ УГЛЕВОДСОДЕРЖАЩЕГО ЖЕЛИРУЮЩЕГО КОНЦЕНТРАТА ДЛЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ | 2003 |
|
RU2252642C2 |

