Изобретение относится к горной промышленности и может быть использовано для управления рабочим оборудованием экскаваторов-драглайнов.
Цель изобретения - повышение надежности и долговечности рабочего оборудования драглайна путем снижения его динамических нагрузок.
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема блока выделения наибольшего сигнала; на фиг. 3 - схема блока согласования; на фиг. 4 - схема блока выделения наименьшего сигнала.
Устройство для управления движением ковша драглайна включает рабочее оборудование в виде ковша 1 с подъемными 2 и тяговыми 3 канатами, двигатель 4 подъемной лебедки 5 и двигатель 6 тяговой лебедки 7. Управление двигателем 4 осуществляется блоком 8 регулирования скорости подъемной лебедки 5, который содержит регулятор 9 напряжения, регулятор 10 тока, управляемый преобразователь 11, датчик 12 напряжения и датчик 13 тока двигателя 4 подъемной лебедки 5. Управление двигателем 6 тяговой лебедки 7 осуш,ествляется
10
Устройство работает следующим образом. Машинист управляет движением ковша драглайна 1 путем изменения выходных сигналов задатчиков 21 и 31 скорости подъемной 5 и тяговой 7 лебедок. На выходе за- датчика натяжения тяговых канатов 3 устанавливается сигнал, соответствуюш,ий, например, 90-95 /о от стопорного значения усилия в тяговых канатах 3. При усилии в тяговых канатах 3, меньшем заданной величины, выходной сигнал регулятора 27 натяжения тяговых канатов 3 больше сигнала на выходе регулятора 16 тока привода тяги, а сигнал на выходе блока 26 согласования меньше, чем сигнал на выходе реJ5 гулятора 10 тока привода подъема. Так как блок 28 выделения сигнала управления приводом тяговой лебедки является блоком выделения наименьшего сигнала, а блок 25 выделения сигнала управления приводом подъемной лебедки является блоком вы20 деления наибольшего сигнала, то при уси/ши в тяговых канатах меньше заданного значения на входы управляемых преобразователей 11 и 17 приводов подъема и тяги поступают сигналы с выхода соответствующих
35
блоком 14 регулирования скорости тяговой 25 регуляторов 10 и 16 тока и, таким образом, лебедки 7, который содержит регулятор управление приводами подъемной и тяго- 15 напряжения, регулятор 16 тока, управ- вой лебедок осуществляется в соответствии ляемый преобразователь 17, датчик 18 напряжения, датчик 19 тока двигателя 6 тяговой лебедки 7. На второй вход регулятора 9 напряжения блока 8 регулирования ско- 30 задатчика 29 натяжения тяговых канатов, рости подъемной лебедки 5 через блок 20 выходной сигнал регулятора 27 натяжения выделения сигнала управления приводом подъемной лебедки 5 поступают сигналы либо от задатчика 21 скорости подъемной лебедки 5, либо от регулятора 22 натяжения подъемных канатов 2, входы которого соединены с задатчиком 23 и датчиком 24 натяжения подъемных канатов. Вход управляемого преобразователя 11 двигателя 4 подъемной лебедки 5 соединен с выходом блока
25 выделения наибольшего сигнала управ- 40 чает ко входу управляемого преобразова- ления приводом подъемной лебедки 5, на теля 17 привода тяговой лебедки сигнал с первый вход этого блока 25 поступает сигнал с выхода регулятора 10 тока привода подъема, а на второй - через блок 26 согласования с выхода регулятора 27 натяжения тяговых канатов 3. Вход управляемого преобразователя 17 двигателя 6 тяговой лебедки 7 соединен с вы.ходом блока 28 выделения наименьшего сигнала управления приводом тяговой лебедки 7, на первый вход блока 28 поступает сигнал с выхода регуля- 50 вход управляемого преобразователя 11 тора 16 тока привода тяги, а на второй - сигнал с выхода блока 26 согласования. Под
45
с сигналами управления .машиниста.
При усилии в тяговых канатах, большем значения, установленного на выходе
тяговых канатов становится меньше, чем сигнал на выходе регулятора 16 тока привода тяговой лебедки 7, а сигнал на выходе блока 26 согласования больше, чем сигнал на выходе регулятора 10 тока привода подъемной лебедки. Блок 28 выделения наименьшего сигнала управления приводом тяговой лебедки, выделяя наименьший из двух сигналов, поступающих на его входы, подклювыхода регулятора 27 натяжения канатов. Под действием этого сигнала происходит уменьшение усилия натяжения тяговых канатов, что обеспечивает снижение динамических нагрузок рабочего оборудования и тягового механизма драглайна.
Блок 25 выделения наибольшего сигнала управления приводом подъемной лебедки, выделяя наибольший сигнал, подключает
с выхода регулятора 27 натяжения тяговых канатов 3, входы которого соединены с выходами задатчика 29 и датчика 30 натяжения тяговых канатов 3. Задатчик 31 скорости тяговой лебедки 7 подключен к входу регулятора 15 напряжения блока 14 регулирования скорости тяговой лебедки 7.
55
действием этого сигнала происходит увеличение усилия натяжения подъемных канатов, что приводит к уменьшению срезаемой ковшом стружки или обходу и.м трудноопределимого препятствия. В результате обеспечивается снижение динамических нагрузок тягового механизма и устраняются
Устройство работает следующим образом. Машинист управляет движением ковша драглайна 1 путем изменения выходных сигналов задатчиков 21 и 31 скорости подъемной 5 и тяговой 7 лебедок. На выходе за- датчика натяжения тяговых канатов 3 устанавливается сигнал, соответствуюш,ий, например, 90-95 /о от стопорного значения усилия в тяговых канатах 3. При усилии в тяговых канатах 3, меньшем заданной величины, выходной сигнал регулятора 27 натяжения тяговых канатов 3 больше сигнала на выходе регулятора 16 тока привода тяги, а сигнал на выходе блока 26 согласования меньше, чем сигнал на выходе регулятора 10 тока привода подъема. Так как блок 28 выделения сигнала управления приводом тяговой лебедки является блоком выделения наименьшего сигнала, а блок 25 выделения сигнала управления приводом подъемной лебедки является блоком выделения наибольшего сигнала, то при уси/ши в тяговых канатах меньше заданного значения на входы управляемых преобразователей 11 и 17 приводов подъема и тяги поступают сигналы с выхода соответствующих
регуляторов 10 и 16 тока и, таким образом, управление приводами подъемной и тяго- вой лебедок осуществляется в соответствии задатчика 29 натяжения тяговых канатов, выходной сигнал регулятора 27 натяжения
с сигналами управления .машиниста.
При усилии в тяговых канатах, большем значения, установленного на выходе
регуляторов 10 и 16 тока и, таким образом, управление приводами подъемной и тяго- вой лебедок осуществляется в соответствии задатчика 29 натяжения тяговых канатов, выходной сигнал регулятора 27 натяжения
чает ко входу управляемого преобразова- теля 17 привода тяговой лебедки сигнал с вход управляемого преобразователя 11 сигнал с выхода блока 26 согласования. Под
тяговых канатов становится меньше, чем сигнал на выходе регулятора 16 тока привода тяговой лебедки 7, а сигнал на выходе блока 26 согласования больше, чем сигнал на выходе регулятора 10 тока привода подъемной лебедки. Блок 28 выделения наименьшего сигнала управления приводом тяговой лебедки, выделяя наименьший из двух сигналов, поступающих на его входы, подключает ко входу управляемого преобразова- теля 17 привода тяговой лебедки сигнал с вход управляемого преобразователя 11 сигнал с выхода блока 26 согласования. Под
выхода регулятора 27 натяжения канатов. Под действием этого сигнала происходит уменьшение усилия натяжения тяговых канатов, что обеспечивает снижение динамических нагрузок рабочего оборудования и тягового механизма драглайна.
Блок 25 выделения наибольшего сигнала управления приводом подъемной лебедки, выделяя наибольший сигнал, подключает
действием этого сигнала происходит увеличение усилия натяжения подъемных канатов, что приводит к уменьшению срезаемой ковшом стружки или обходу и.м трудноопределимого препятствия. В результате обеспечивается снижение динамических нагрузок тягового механизма и устраняются
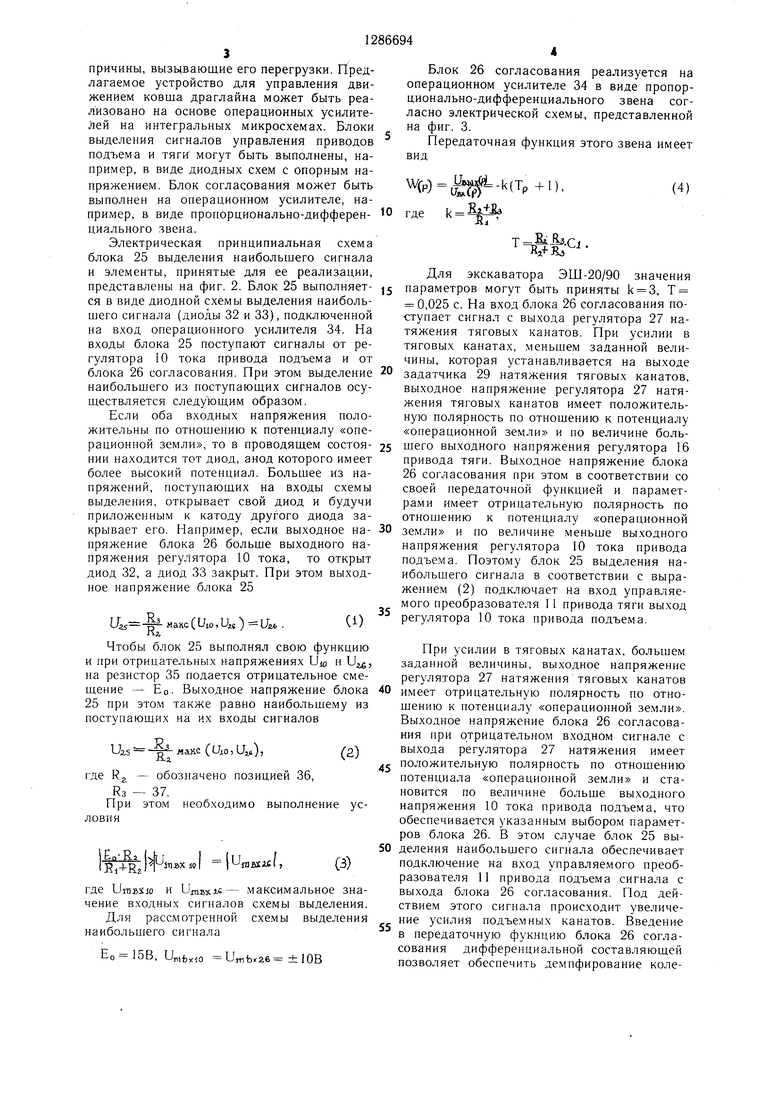
Блок 26 согласования реализуется на операционном усилителе 34 в виде пропорционально-дифференциального звена согласно электрической схемы, представленной на фиг. 3.
Передаточная функция этого звена имеет вид
fr) (P+l)
(4)
где k i8f
т§ёсДля экскаватора ЭШ-20/90 значения
причины, вызывающие его перегрузки. Предлагаемое устройство для управления движением ковша драглайна может быть реализовано на основе операционных усилителей на интегральных микросхемах. Блоки выделения сигналов управления приводов подъема и тяги могут быть выполнены, например, в виде диодных схем с опорным напряжением. Блок согласования может быть выполнен на операционном усилителе, например, в виде пропорционально-дифферен- О циального звена.
Электрическая принципиальная схема блока 25 выделения наибольшего сигнала и элементы, принятые для ее реализации,
представлены на фиг. 2. Блок 25 выполняет- jj параметров могут быть приняты k 3, Т ся в виде диодной схемы выделения наиболь- 0,025 с. На вход блока 26 согласования по- шего сигнала (диоды 32 и 33), подключенной -ступает сигнал с выхода регулятора 27 на- на вход операционного усилителя 34. На тяжения тяговых канатов. При усилии в входы блока 25 поступают сигналы от ре- тяговых канатах, меньшем заданной вели- гулятора 10 тока привода подъема и от чины, которая устанавливается на выходе блока 26 согласования. При этом выделение 20 задатчика 29 натяжения тяговых канатов, наибольшего из поступающих сигналов осу- выходное напряжение регулятора 27 натя- шествляется следуюшим образом.
Если оба входных напряжения положительны по отношению к потенциалу «операционной земли, то в проводящем состоя- 25 шего выходного напряжения регулятора 16 НИИ находится тот диод, анод которого имеет привода тяги. Выходное напряжение блока более высокий потенциал. Большее из напряжений, поступающих на входы схемы выделения, открывает свой диод и будучи приложенным к катоду другого диода закрывает его. Например, если выходное на- 30 земли и по величине меньше выходного пряжение блока 26 больше выходного на- напряжения регулятора 10 тока привода
жения тяговых канатов имеет положительную полярность по отношению к потенциалу «операционной земли и по величине боль26 согласования при этом в соответствии со своей передаточной функцией и параметрами имеет отрицательную полярность по отношению к потенциалу «операционной
пряжения регулятора 10 тока, то открыт диод 32, а диод 33 закрыт. При этом выходное напряжение блока 25
подъема. Поэтому блок 25 выделения наибольшего сигнала в соответствии с выражением (2) подключает на вход управляемого преобразователя 11 привода тяги выход регулятора 10 тока привода подъема.
Ua5 -fr «а«с С Uio, и« ) 1Ле . Лг,
CD
25 при этом также равно наибольшему из поступающих на их входы сигналов
U;i5--2ij,aKcC(J,0,U,0) л,я
(S)
Чтобы блок 25 выполнял свою функциюПри усилии в тяговых канатах, большем
и при отрицательных напряжениях Ujo и U, заданной величины, выходное напряжение на резистор 35 подается отрицательное сме- регулятора 27 натяжения тяговых канатов шение - ЕО. Выходное напряжение блока 40 имеет отрицательную полярность по отношению к потенциалу «операционной земли. Выходное напряжение блока 26 согласования при отрицательном входном сигнале с выхода регулятора 27 натяжения имеет 5 положительную полярность по отношению потенциала «oпepaциo шoй земли и становится по величине больше выходного напряжения 10 тока привода подъема, что обеспечивается указанным выбором параметров блока 26. В этом случае блок 25 вы- 50 деления наибольшего сигнала обеспечивает подключение на вход управляемого преобразователя 11 привода подъема сигнала с выхода блока 26 согласования. Под действием этого сигнала происходит увеличение усилия подъемных канатов. Введение в передаточную фукнцию блока 26 согласования дифференциальной составляющей позволяет обеспечить демпфирование колегде Rj - обозначено позицией 36,
Ra - 37.
При этом необходимо выполнение условия
- iriBX
I - (и / к - |UtnKCie(,
Сз)
где UMBXJO и UinBxis- максимальное значение входных сигналов схемы выделения. Для рассмотренной схемы выделения наибольшего сигнала
, Uflib io Umbrae ± 10В
55
Блок 26 согласования реализуется на операционном усилителе 34 в виде пропорционально-дифференциального звена согласно электрической схемы, представленной на фиг. 3.
Передаточная функция этого звена имеет вид
fr) (P+l)
(4)
где k i8f
т§ёсДля экскаватора ЭШ-20/90 значения
аметров могут быть приняты k 3, Т ,025 с. На вход блока 26 согласования по- пает сигнал с выхода регулятора 27 на- ения тяговых канатов. При усилии в овых канатах, меньшем заданной вели- ы, которая устанавливается на выходе атчика 29 натяжения тяговых канатов, одное напряжение регулятора 27 натя-
параметров могут быть приняты k 3, Т 0,025 с. На вход блока 26 согласования по- -ступает сигнал с выхода регулятора 27 на- тяжения тяговых канатов. При усилии в тяговых канатах, меньшем заданной вели- чины, которая устанавливается на выходе задатчика 29 натяжения тяговых канатов, выходное напряжение регулятора 27 натя-
шего выходного напряжения регулятора 16 привода тяги. Выходное напряжение блока земли и по величине меньше выходного напряжения регулятора 10 тока привода
жения тяговых канатов имеет положительную полярность по отношению к потенциалу «операционной земли и по величине большего выходного напряжения регулятора 16 привода тяги. Выходное напряжение блока земли и по величине меньше выходного напряжения регулятора 10 тока привода
26 согласования при этом в соответствии со своей передаточной функцией и параметрами имеет отрицательную полярность по отношению к потенциалу «операционной
шего выходного напряжения регулятора 16 привода тяги. Выходное напряжение блока земли и по величине меньше выходного напряжения регулятора 10 тока привода
подъема. Поэтому блок 25 выделения наибольшего сигнала в соответствии с выражением (2) подключает на вход управляемого преобразователя 11 привода тяги выход регулятора 10 тока привода подъема.
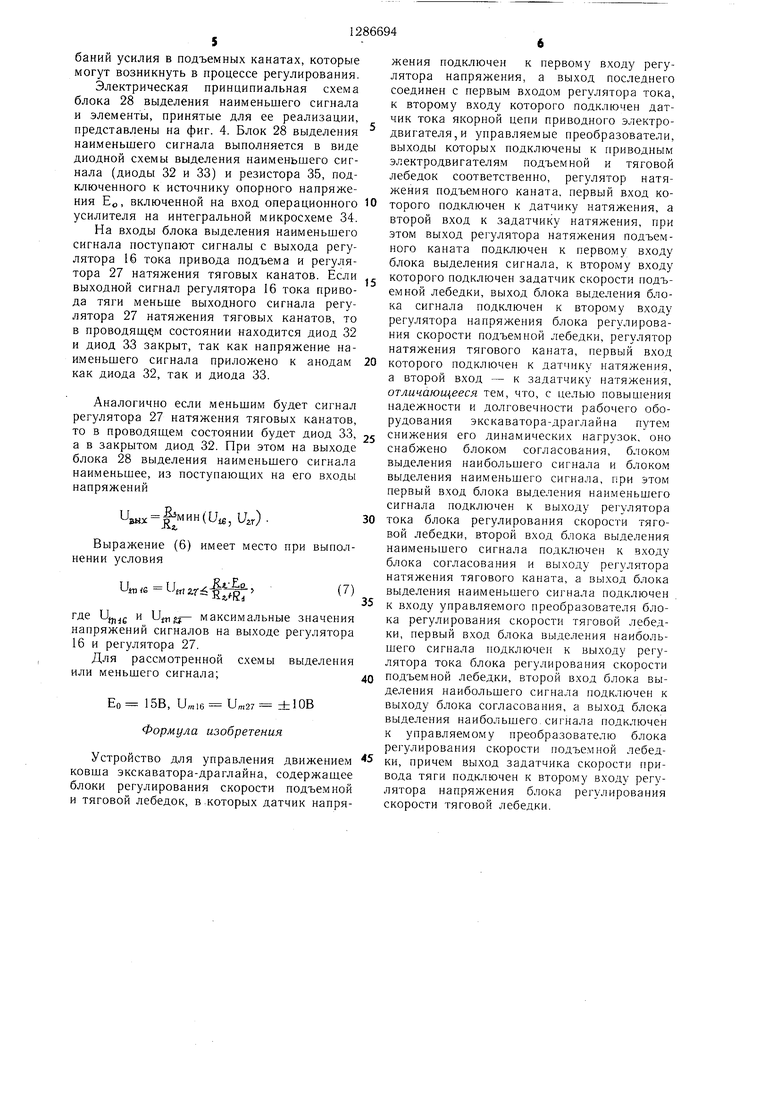
баний усилия в подъемных канатах, которые могут возникнуть в процессе регулирования. Электрическая принципиальная схема блока 28 выделения наименьшего сигнала и элементы, принятые для ее реализации, представлены на фиг. 4. Блок 28 выделения наименьшего сигнала выполняется в виде диодной схемы выделения наименьшего сигнала (диоды 32 и 33) и резистора 35, подключенного к источнику опорного напряжежения подключен к первому входу регулятора напряжения, а выход последнего соединен с первым входом регулятора тока, к второму входу которого подключен датчик тока якорной цепи приводного электродвигателя, и управляемые преобразователи, выходы которых подключены к приводным электродвигателям подъемной и тяговой лебедок соответственно, регулятор натяжения подъемного каната, первый вход кония ЕО, включенной на вход операционного Ю торого подключен к датчику натяжения, а усилителя на интегральной микросхеме 34. второй вход к задатчику натяжения, при
На входы блока выделения наименьшего сигнала поступают сигналы с выхода регулятора 16 тока привода подъема и регулятора 27 натяжения тяговых канатов. Если выходной сигнал регулятора 16 тока привода тяги меньше выходного сигнала регулятора 27 натяжения тяговых канатов, то в проводяш м состоянии находится диод 32
и диод 33 закрыт, так как напряжение наименьшего сигнала приложено к анодам как диода 32, так и диода 33.
20
этом выход регулятора натяжения подъемного каната подключен к первому входу блока выделения сигнала, к второму входу которого подключен задатчик скорости подъемной лебедки, выход блока выделения блока сигнала подключен к второму входу регулятора напряжения блока регулирования скорости подъемной лебедки, регулятор натяжения тягового каната, первый вход которого подключен к датчику натяжения, а второй вход - к задатчику натяжения, отличающееся тем, что, с целью повышения надежности и долговечности рабочего оборудования экскаватора-драглайна путем снижения его динамических нагрузок, оно снабжено блоком согласования, блоком выделения наибольшего сигнала и блоком выделения наименьшего сигнала, при этом первый вход блока выделения наименьшего сигнала подключен к выходу регулятора
Аналогично если меньшим будет сигнал регулятора 27 натяжения тяговых канатов, то в проводяшем состоянии будет диод 33, 25 а в закрытом диод 32. При этом на выходе блока 28 выделения наименьшего сигнала наименьшее, из поступаюших на его входы напряжений
Ц
,MnH(i;te, )
Выражение (6) имеет место при выполнении условия
им.
(7)
где Ujjjjg и Utngj- максимальные значения напряжений сигналов на выходе регулятора 16 и регулятора 27.
Для рассмотренной схемы выделения или меньшего сигнала;
ЕО 15В, U, ±10В
Формула изобретения
Устройство для управления движением ковша экскаватора-драглайна, содержашее блоки регулирования скорости подъемной и тяговой лебедок, в.которых датчик напряжения подключен к первому входу регулятора напряжения, а выход последнего соединен с первым входом регулятора тока, к второму входу которого подключен датчик тока якорной цепи приводного электродвигателя, и управляемые преобразователи, выходы которых подключены к приводным электродвигателям подъемной и тяговой лебедок соответственно, регулятор натяжения подъемного каната, первый вход ко торого подключен к датчику натяжения, а второй вход к задатчику натяжения, при
0
5
этом выход регулятора натяжения подъемного каната подключен к первому входу блока выделения сигнала, к второму входу которого подключен задатчик скорости подъемной лебедки, выход блока выделения блока сигнала подключен к второму входу регулятора напряжения блока регулирования скорости подъемной лебедки, регулятор натяжения тягового каната, первый вход которого подключен к датчику натяжения, а второй вход - к задатчику натяжения, отличающееся тем, что, с целью повышения надежности и долговечности рабочего оборудования экскаватора-драглайна путем снижения его динамических нагрузок, оно снабжено блоком согласования, блоком выделения наибольшего сигнала и блоком выделения наименьшего сигнала, при этом первый вход блока выделения наименьшего сигнала подключен к выходу регулятора
0 тока блока регулирования скорости тяговой лебедки, второй вход блока выделения наименьшего сигнала подключен к входу блока согласования и выходу регулятора натяжения тягового каната, а выход блока выделения наименьшего сигнала подключен
5 к входу управляемого преобразователя блока регулирования скорости тяговой лебедки, первый вход блока выделения наибольшего сигнала подключен к выходу регулятора тока блока регулирования скорости
0 подъемной лебедки, второй вход блока выделения наибольшего сигнала подключен к выходу блока согласования, а выход блока выделения наибольшего, сигнала подключен к управляемому преобразователю блока регулирования скорости подъемной лебедки, причем выход задатчика скорости привода тяги подключен к второму входу регулятора напряжения блока регулирования скорости тяговой лебедки.
5
В 5локе 25: fJBx2 - UIQ
вых - j- 1пох(и8х,Щ о
фиа.2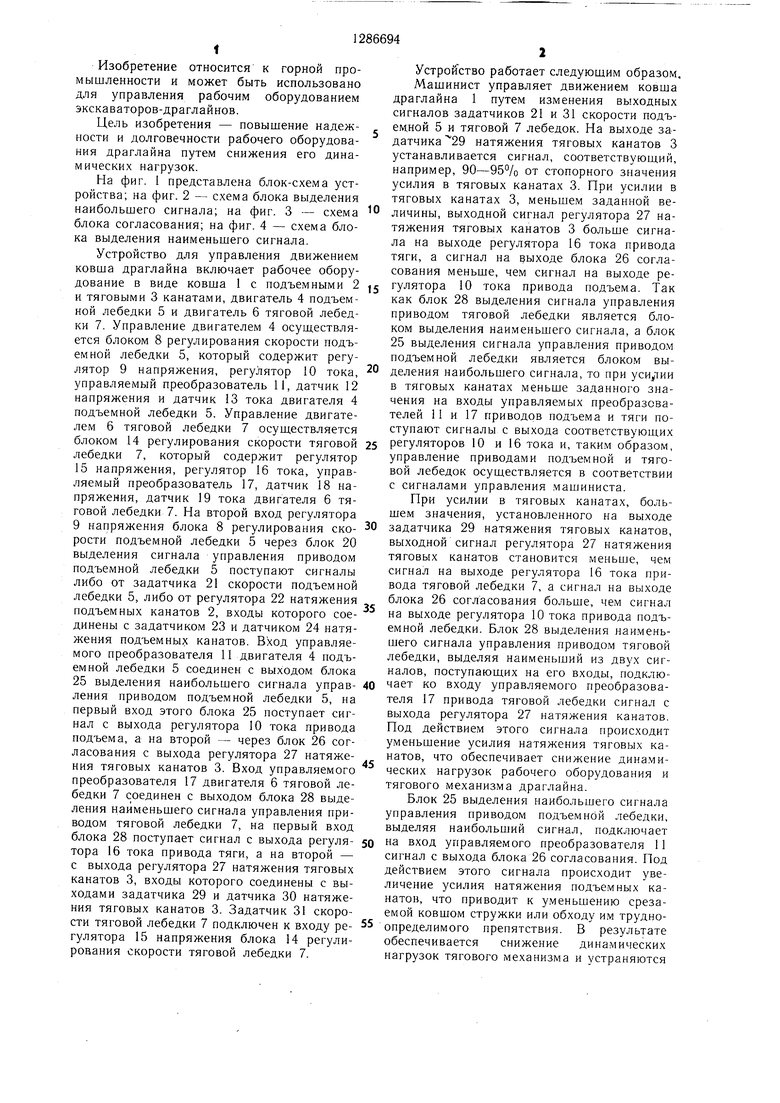
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1425276A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2011 |
|
RU2457295C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659598A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
Изобретение относится к горной промышленности и позволяет повысить надежность и долговечность рабочего оборудования драглайна путем снижения его дина- .мических нагрузок. Для этого устройство снабжено блоком 26 согласования и блоками выделения наименьшего 28 и наибольшего 25 сигналов, включенными соответственно в контуры управления приводами 6 и 4 подъема и тяги. К входам блоков 25 и 28 подключены выходы регуляторов (Р) 10 и 16 штока подъемного 2 и тяговых канатов (ТК) 3 и выход Р 27 натяжения ТК (к блоку 28 - непосредственно, а к блоку 25 через блок 26). Управление движением ковша 1 осушествляется изменением выходных сигналов задатчиков 21 и 31 скорости подъемной 5 и тяговой 7 лебедок. При усилии в ТК, меньшем заданного значения, на входы управляемых преобразователей 11 и 17 приводов подъема и тяги поступают сигналы с выходов соответствуюших Р 10 и 16. При усилии в ТК, большем установленного в задатчике 29, сигнал на выходе блока 26 будет больше сигнала на выходе Р 10. Блок 28 выделяет наименьший сигнал управления приводом 6, который уменьшает усилие натяжения ТК. Блок 25 выделяет наибольший сигнал, который увеличивает усилие натяжения подъемных канатов 2. В результате снижаются динамические нагрузки тягового механизма и устраняются причины, вызывающие его перегрузки. 4 ил. i (Л 1с с Од 05 
Usx и 27 35
о
qOi/e. J
- 27
U$blX - minp8X7,UbY)
US.
| Ломакин М | |||
| С | |||
| Автоматическое управление технологическими процессами карьеров | |||
| М.; Недра, 1978, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
