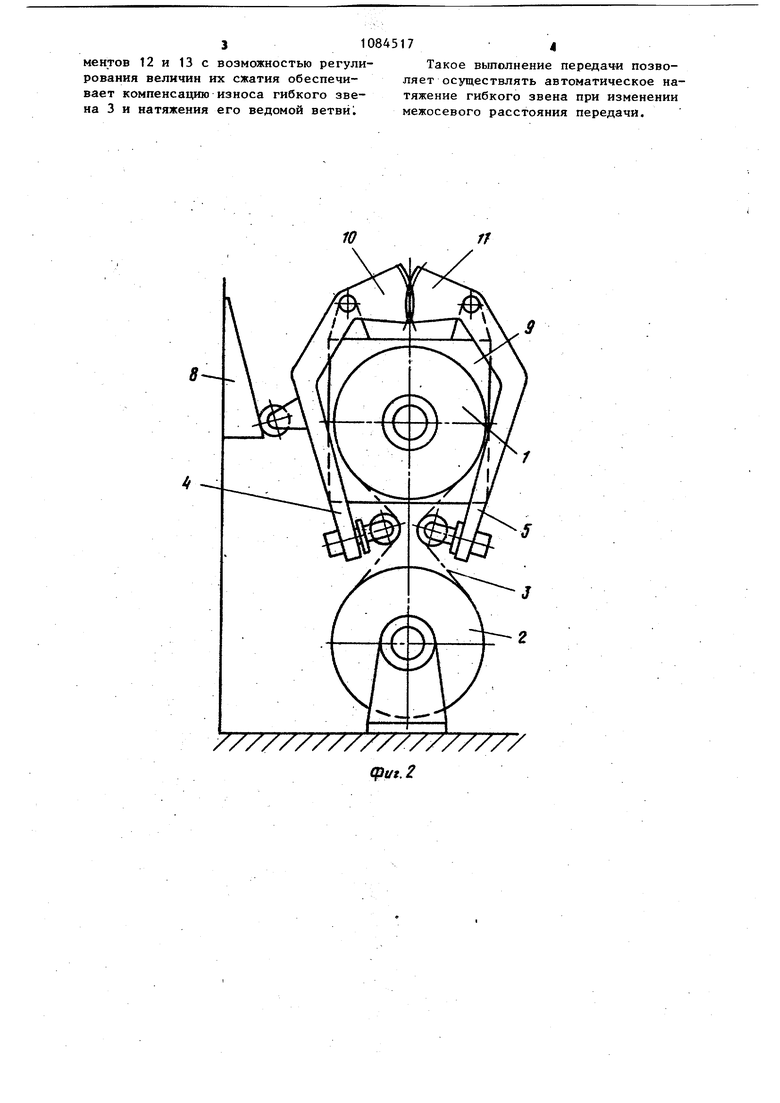
Изобретение относится к машиностроению и может найти применение в реверсивных передачах с гибкой связью с изменяемым межосевым расстоянием. Известна реверсивная передача с гибкой связью, содержащая ведущую и ведомую звездочки, охваченные гиб ким элементом, и натяжное устройств вьтолненное в виде перемещаемых вдоль гибкого элемента вилок с натя ными роликами, связанными мевду собой пружиной fll . Недостатком данной передачи явля ется то, что с изменением межосевог расстояния передачи давление роликов на ветви гибкого элемента изменяется при одном и том же передавае мом вращающем моменте. Наиболее близкая к предлагаемой передача с гибкой связью содержит две звездочки, охватьгоающее звездоч ки замкнутое гибкое звено и два качающихся рычага, имеющие на концах натяжные ролики, каждый из которых взаимодействует с одной из ветвей гибкого звена 2 . В передаче оси качания рычагов неподвижные, а натяжение гибкого зв на осуществляется под действием реактивного момента, соединяемого с одной из звездочек электродвигателя Однако известная передача характ ризуется отсутствием самонатяжения гибкого звена при изменении межосевого расстояния передачи. Цель изобретения - обеспечение автоматического натяжения гибкого звена при изменении межосевого расстояния передачи. Указанная цель достигается тем, что передача с гибкой связью, содер щая две звездочки, охватывающие зве дочки замкнутое гибкое звено и два качающихся рычага, имеющие на конца натяжные:ролики, каждьй из которых взаимодействует с одной из ветвей гибкого звена, снабжена неподвижно установленным кулачком и ползуном, на котором установлена одна из звез дочек, рычаги размещены на осях, за крепленных на ползуне, с возможностью синхронного поворота в противо положных направлениях в плоскости вращения звездочек и по крайней мере один из рычагов взаимодействует с кулачком. 172 На фиг. 1 схематично изображена передача с гибкой связью на фиг. 2 то же, при изменении межосевого расстояния передачи; на фиг. 3 - разрез А-А на фиг. 1. Передача с гибкой связью содержит звездочки 1 и 2, охватывающие их замкнутое гибкое звено, качающиеся рычаги 4 и 5, имеющие на концах натяжные ролики 6 и 7, каждый из которых взаимодействует с одной из ветвей гибкого звена 3, неподвижно установленный кулачок 8 и ползун 9, на котором установлена звездочка 1. Рычаги 4 и 5 размещены на осях, закрепленных на ползуне 9, е возможностью синхронного поворота в противоположных направлениях в плоскости вращения звездочек. Рычаг 4 взаимодействует с кулачком 8. Синхронный поворот рычагов 4 и 5 может быть осуществлен, например, с помощью закрепленных на рычагах 4 и 5 взаимодействующих между собой зубчатых секторов 10 и 11 или другик известных средств. Дпя компенсации износа гибкого звена 3 и натяжения его ведомой ветви натяжные ролики 6 и 7 могут быть связаны с рычагами 4 и 5 посредством сжатых упругих элементов 12 и 13 с регулируемой величиной силы сжатия каждого из них, например, с помопц ю винтовой пары 4 и 14. Передача с гибкой связью работает следунщим образом. При ведущей звездочке 2 вращение от нее передается звездочке 1 гибким звеном 3. Изменение межосевого расстояния передачи осуществляется перемещением ползуна 9. При этом рычаги 4 и 5 синхронно поворачиваются относительно закрепленных на ползуне 9 осей в противоположные стороны на угол, определяемый профилем кулачка 8, с которым Взаимодействует рычаг 4. При этом расположенные на концах рычагов 4 и 5 натяжные ролики 6 и 7 сближаются или расходятся, что обеспечивает автоматическое натяжение гибкого звена 3 в зависимости от изменения межосевого расстояния передачи, т.е. расстояния между осями звездочек 1 и 2, при любом направлении вращения ведущей звездочки. Упругая связь натяжных роликов 6 и 7 с рычагами 4 и 5 посредством упругих эле310845174
ментов 12 и 13 с возможностью регули- Такое выполнение передачи позворования величин их сжатия обеспечи- ляет осуществлять автоматическое навает компенсацию износа гибкого зве- тяжение гибкого звена при изменении на 3 и натяжения его ведомой ветвиL межосевого расстояния передачи.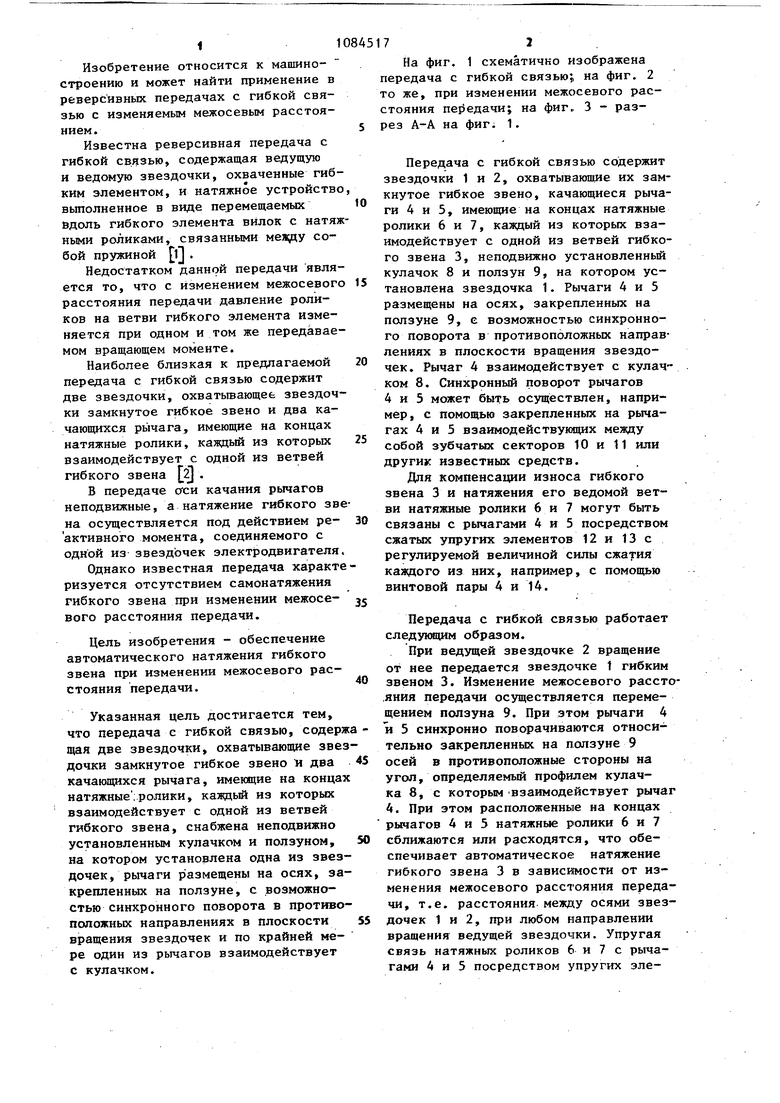
| название | год | авторы | номер документа |
|---|---|---|---|
| Передача с гибкой связью | 1985 |
|
SU1240979A1 |
| Цепная передача | 2020 |
|
RU2753367C1 |
| Стенд для испытания деталей машин с гибкими передачами | 1977 |
|
SU678379A1 |
| СПОСОБ НАТЯЖЕНИЯ ЗУБЧАТОГО РЕМНЯ | 2009 |
|
RU2435088C2 |
| НАТЯЖНОЕ УСТРОЙСТВО ДЛЯ РЕВЕРСИВНЫХ ПЕРЕДАЧ С ГИБКОЙ СВЯЗЬЮ | 2012 |
|
RU2517273C2 |
| Мускульный привод транспортного средства | 1982 |
|
SU1065279A1 |
| Кабелеукладчик | 1990 |
|
SU1736912A1 |
| Самонатяжной привод | 1980 |
|
SU894275A1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| ПРИВОД КАРЕТКИ ПЛОСКОВЯЗАЛЬНОЙ МАШИНЫ | 2002 |
|
RU2198252C1 |

ПЕРЕДАЧА С ГИБКОЙ СВЯЗЬЮ, содержащая две звездочки, охватывающее звездочки замкнутое гибкое зве но и два качающихся рычага, имекицие каждый ,на концах натяжные ролики. 4 из которых взаимодействует с одной из ветвей гибкого,звена, о т л и - чающаяся тем, что, с целью автоматического натяжения гибкого звена при изменении межосевого расстояния передачи, она снабжена неподвижно установленным кулачком и ползуном, на котором установлена одна из звездочек, рычаги размещены на осях, закрепленных на ползуне, с возможностью синхронного поворота в противоположных направлениях в плоскости вращения звездочек и по крайней мере один из рычагов взаимодействует с кулачком. я 9 в t
Фм. г S 3 7 фиг.З Ух/УоБ/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Передача с гибкой связью | 1979 |
|
SU896287A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство адресования предметов | 1979 |
|
SU893275A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
