(5) САМОНАТЯЖНОЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонатяжной привод с гибкой связью | 1980 |
|
SU937836A1 |
| Самонатяжной ременный привод | 1979 |
|
SU806946A1 |
| Передача с гибкой связью | 1980 |
|
SU894273A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ РЕМНЯ | 2009 |
|
RU2403468C1 |
| Передача с гибкой связью | 1980 |
|
SU894271A1 |
| Передача с гибкой связью | 1982 |
|
SU1084517A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2008 |
|
RU2509934C2 |
| Автоматическое натяжное устройство для цепных передач | 1980 |
|
SU894272A1 |
| Самонатяжной ременный привод | 1979 |
|
SU929922A2 |
| АВТОМАТИЧЕСКОЕ УНИВЕРСАЛЬНОЕ НАТЯЖНОЕ УСТРОЙСТВО ДЛЯ РЕВЕРСИВНЫХ ЦЕПНЫХ ПЕРЕДАЧ | 2015 |
|
RU2592970C1 |
I
Изобретение относится к машиностроению и может быть применено во всех отраслях народного хозяйства для натяжения ведомых ветвей передач с гибкой связью (ременных, цепных).
Известны натяжные устройства для цепных передач, воздействующие с постоянной силой на ведомую ветвь передачи, состоящие из поворотного кронштейна, на одном конце которого крепится натяжной ролик или звездочка, контактирующие с цепью или ремнем, а на втором конце кронштейна подвешен груз, а также автоматическое натяжное устройство с нажимной колодкой, шарнирно закрепленной на одноплечем рычаге, нажимающей на цепь под действием груза, расположенного на двуплечем рычаге .1 У
Известен привод с гибкой связью в котором механизм тяжения позволяет автоматически изменять натяжение в зависимости от передаваемой окружной силы. Он состоит из эксцентрично закрепленного на опоре двигателя. Натяжение создается за счет возникающего при движении реактивного момента. Недостатком приведенного аналога явля ется невозможность реверсирования передачи, а также увеличения углов обхвата звездочек (шкивов) по мере износа гибкой связи и увеличения натяжения ведомой ветви 2.
Основным недостатком приведенных
10 устройств является невозможность получения натяжения ветви гибкой связи при реверсировании передачи.
Наиболее близким по технической
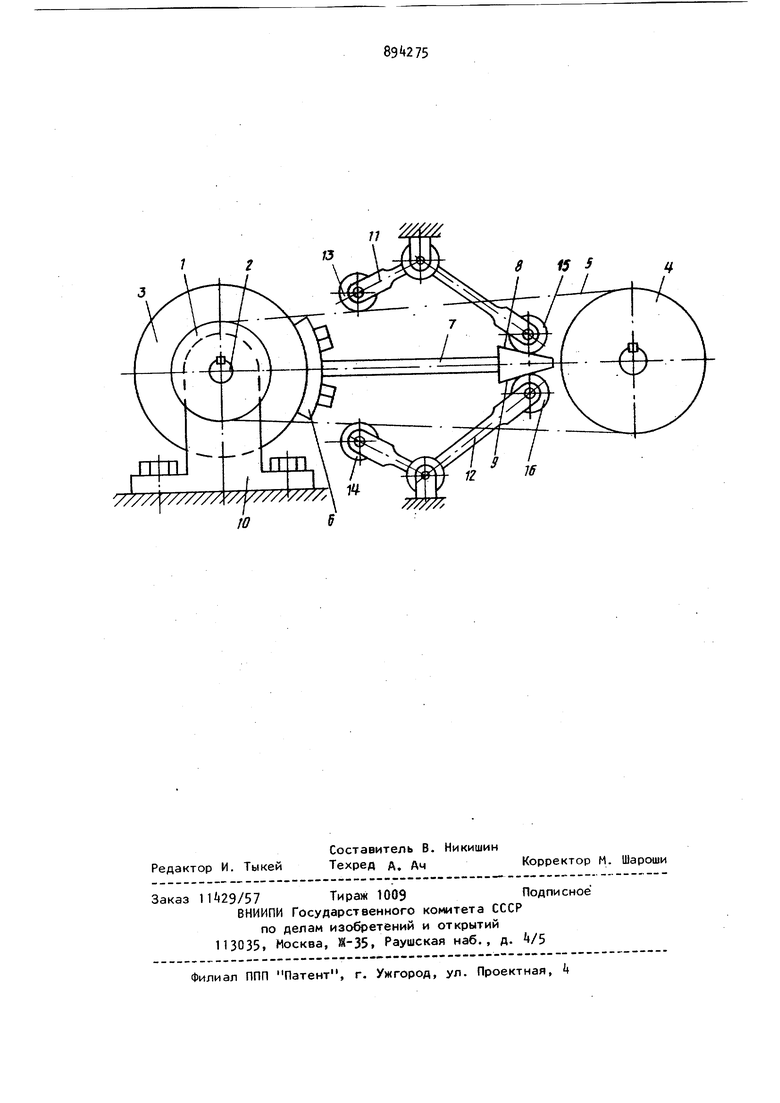
ts сущности и достигаемому результату к предлагаемому является самонатяжной привод, содержащий передачу с гибкой связью, включающую ведущую, установленную на валу электродвигателя, и
ведомую звездочки, и охватывающую их гибкую свйзь, и рычаг, закрепленный на корпусе электродвигателя, вал которого размещен в шарнирных опорах . Основным недостатком данного устройства является невозможность автоматически .регулировать натяжение гибкой связи по мере ее износа, удлинения. Цель изобретения - обеспечение автоматического натяжения гибкой связи в процессе ее износа. Указанная цель достигаете: тем, что на конце рычага выполнены криволинейные участки, привод снабжен дву мя качающимися рычагами на одном кон це которых установлены натяжные звез дочки взаимодействущие с наружными поверхностями ветвей гибкой связи, а другие концы взаимодействуют с криволинейны участками рычага. На чертеже показан привод,общий вид Самонатяжной привод содержит передачу с гибкой связью, включающую ведущую 1, установленную на валу 2 элек тродвигателя 3 и ведомую Ц звездочки охватывающую их гибкую связь 5, закрепленный на корпусе 6 электродвигателя 3 рычаг 7 с криволинейными участками 8 и 9. Вал 2 электродвигателя 3 размещен в шарнирных опорах 10 Привод содержит дв.а качающихся рычага 11 и 12 на одном конце которых установлены натяжные звездочки 13 и Т взаимодействующие с наружными поверхностями ветвей гибкой связи 5, а другие концы взаимодействуют с помощью роликов 15 и 16 с криволинейными участками 8 и 9 рычага 7Привод работает следующим образом В определенный момент времени работы передачи момент двигателя уравновешивается реактивным моментом статора за счет создания посредством рычагов 7 и t1 усилия натяжения холостой ветви. В процессе износа гибкой связи, вследствие увеличения ее длины, ранее установившееся равновесие нарушается и рычаг 7 поворачивается вместе с электродвигателем 3 в направлении действия реактивного момента до тех пор, пока реактивный момент действующий со стороны криволинейного участка 8 мз ролик 16, не ураанове сится СИ/10Й, действующей со стороны холостой ветви на натяжную звездоч5 . 4 ку 13. Натяжная звездочка 1А при этом отходит от ведущей ветви. При изменении направления движения усилие натяжения холостой ветви создается натяжной звездочкой Н, а звездочка 13 отходит от ведущей ветви. Надлежащим выбором профилей криволинейных участков можно обеспечить требуемый закон применения усилия натяжений холостой ветви, обеспечивающий оптимальные условия эксплуатации гибкой связи И максимальную ее долговечность. Применение предлагаемого изобретения позволит обеспечить эффективную регулировку натяжения ветвей передач гибкой связью и реверсирование передачи, что повысит их работоспособность, долговечность и, несомненно, даст определенный экономический эффект. Формула изобретения Самонатяжной привод, содержащий передачу с гибкой связью включающую ведущую, установленную на валу электродвигателя, и ведомую звездочки,и охватывающую их гибкую связь, и рычаг, закрепленный на корпусе электродвигателя, вал которого размещен в шарнирных опорах, отличающ и и с я тем, что, с целью обеспе ения автоматического натяжения гибкой связи в процессе ее износа, на конце рычага выполнены криволинейные участки, привод снабжен двумя качающимися рычагами на одном конце которых установлены натяжные звездочки взаимодействующие с наружными поверхностями ветвей гибкой связи, а другие концы взаимодействуют с криволинейны участками рычага. Источники информации, принятые во внимание при экспертизе 1. Воробьев И.В. Цепные передачи. М., Машиностроение, 1968, с. 392.Воробьев И.И. Ременные передачи. М,, Машиностроение , 1979 с. 373.Авторское свидетельство СССР по заявке W 27673 7/25-28,, кл. F 16 Н 7/.12, 15.05.79 (прототип)
