Заявляемое изобретение относится к передачам для сообщения вращательного движения с помощью бесконечной гибкой связи, точнее, к устройствам изменения натяжения в реверсивной передаче с бесконечной гибкой связью с помощью натяжного ролика, во время ее работы, у которой расположение осей ведущего и ведомого роликов и плоскость расположения ветвей гибкой связи размещены в вертикальной плоскости.
Известно применение груза, поворотного на оси, для натяжения обеих ветвей реверсивной передачи с гибкой связью. См., например, книгу «Курсовое проектирование деталей машин», авторов К.И.Боков, Г.М.Ицкович и др., Изд - во «Машгиз», Ленинград, 1960 г., стр.247.
Известны применения натяжных устройств в реверсивных передачах с бесконечной гибкой связью во время их работы, содержащих шарнирно установленный на станине, в плоскости расположения гибкой связи, качающийся кронштейн со своей осью качания расположенной в плоскости осей ведущего и ведомого роликов, с шарнирно закрепленными на нем двумя натяжными роликами, одинаково отстоящими от оси качания кронштейна, постоянно соприкасающимися каждый только с одной ветвью гибкой связи, под действием пружин. См., например, АС СССР, МПК F16H 7/12, №413314, на «Натяжное устройство для реверсивных передач с гибкой связью», опубликованное 30.01.1974 г. в БИ №4, принятое в качестве прототипа.
Существенными признаками прототипа, совпадающими с существенными признаками заявляемого натяжного устройства в реверсивной передаче с бесконечной гибкой связью во время ее работы, являются следующие: устройство содержит шарнирно установленный на станине, в плоскости расположения гибкой связи, качающийся кронштейн со своей осью качания, расположенной в плоскости осей ведущего и ведомого роликов, с шарнирно закрепленными на нем двумя натяжными роликами, одинаково отстоящими от оси качания кронштейна, соприкасающимися каждый только с одной ветвью гибкой связи, и грузом, создающим усилия натяжения гибкой связи.
В передачах с бесконечной гибкой связью полезная нагрузка передается от привода только ведущей, двигающейся к приводу, тянущей приводом ветви гибкой связи. Ветвь гибкой связи, идущая от привода, ведомая ветвь, нагрузку не передает и, толкаемая приводом, может даже провисать. Любая передающая нагрузку гибкая связь от воспринимаемых усилий и из-за нежесткости поддерживающих ее конструкций вытягивается и начинает провисать, что отрицательно сказывается на работе механизма при реверсе направления движения гибкой связи от привода. Привод начинает проскальзывать, т.к. он должен сначала убрать провисание ведомой ветви гибкой связи, двигающейся от привода и не передающей нагрузку, и только потом передавать полезную нагрузку от привода на эту ветвь, ставшую ведущей. В известных устройствах с этим недостатком борются с помощью одного или двух натяжных роликов, расположенных на шарнирно закрепленном на станине качающемся на оси кронштейне, постоянно соприкасающемся своими натяжными роликами с ведущей и ведомой ветвями гибкой связи под действием пружин. Или с помощью размещения на качающимся кронштейне груза, создающего усилия натяжения гибкой связи. При этих способах в реверсивных передачах натяжению от действия пружин или груза подвергаются сразу обе движущиеся в противоположных направлениях ветви бесконечной гибкой связи или только одна ветвь гибкой связи, независимо от того, ведущая она или ведомая, передает она нагрузку или нет. См., например, упомянутую книгу К.Н.Бокова стр.244. При дополнительном натяжении пружиной или грузом ведущей ветви гибкой связи, двигающейся к приводу и передающей нагрузку, увеличивается расход энергии, потребляемой приводом, и укорачивается срок службы гибкой связи. В этом случае приводу приходится преодолевать, кроме рабочей нагрузки, еще и усилие натяжения ветви гибкой связи от действия пружины или груза, т.е. привод тянет ветвь гибкой связи в свою сторону, преодолевая сопротивление пружины или груза и силу трения натяжных роликов о две ветви гибкой связи. При натяжении грузом только одной ведомой ветви, двигающейся от привода и не передающей нагрузки, этого не происходит и сила трения натяжных роликов только об одну ветвь гибкой связи уменьшается вдвое.
Технической задачей, на решение которой направлено заявляемое устройство, является возможность отклонения натяжными роликами под действием груза только одной движущейся от привода ненагруженной ведомой ветви гибкой связи при каждом реверсе направления движения гибкой связи от привода, за счет чего уменьшается расход энергии приводом и увеличивается срок службы гибкой связи в передаче.
Для достижения названного технического результата, в заявляемом устройстве расстояние между крайними наружными точками диаметров натяжных роликов выполнено большим, чем диаметр наибольшего ведущего или ведомого роликов, а кронштейн, симметрично качающийся вокруг среднего положения при каждом реверсе в шарнире, закрепленном на станине, в среднем своем положении расположен вертикально, а шарнирно закрепленные на нем два натяжных ролика выполнены каждый в своем крайнем положении отклоняющим только одну ветвь гибкой связи, идущую от ведущего ролика, причем создающий одинаковые усилия натяжения только одной ветви гибкого элемента при каждом реверсе груз размещен на кронштейне выше шарнира, а центры масс груза, натяжных роликов, качающегося кронштейна размещены в вертикальной плоскости расположения осей диаметров ведущего и ведомого роликов, проходящей через ось шарнира, и симметрично, относительно этой плоскости, в среднем вертикальном положении кронштейна.
Отличительными признаками заявляемого натяжного устройства является то, что расстояние между крайними наружными точками диаметров натяжных роликов выполнено большим, чем диаметр наибольшего ведущего или ведомого роликов, а кронштейн, симметрично качающийся вокруг среднего положения при каждом реверсе в шарнире, закрепленном на станине, в среднем своем положении расположен вертикально, а шарнирно закрепленные на нем два натяжных ролика выполнены, каждый в своем крайнем положении, отклоняющим только одну ветвь гибкой связи, идущую от ведущего ролика, причем создающий одинаковые усилия натяжения только одной ветви гибкого элемента при каждом реверсе груз размещен на кронштейне выше шарнира, а центры масс груза, натяжных роликов, качающегося кронштейна размещены в вертикальной плоскости, расположения осей диаметров ведущего и ведомого роликов, проходящей через ось шарнира, и симметрично, относительно этой плоскости, в среднем вертикальном положении кронштейна.
Заявляемое устройство может найти применение в реверсивных передачах с бесконечной гибкой связью, при регулировании ее натяжения с помощью натяжных роликов, во время их работы, у которых расположение осей ведущего и ведомого роликов и плоскость расположения ветвей гибкой связи размещены в вертикальной плоскости и усилия натяжения передаются только на одну ведомую ветвь гибкой связи.
Сущность заявляемого изобретения поясняется прилагаемыми чертежами.
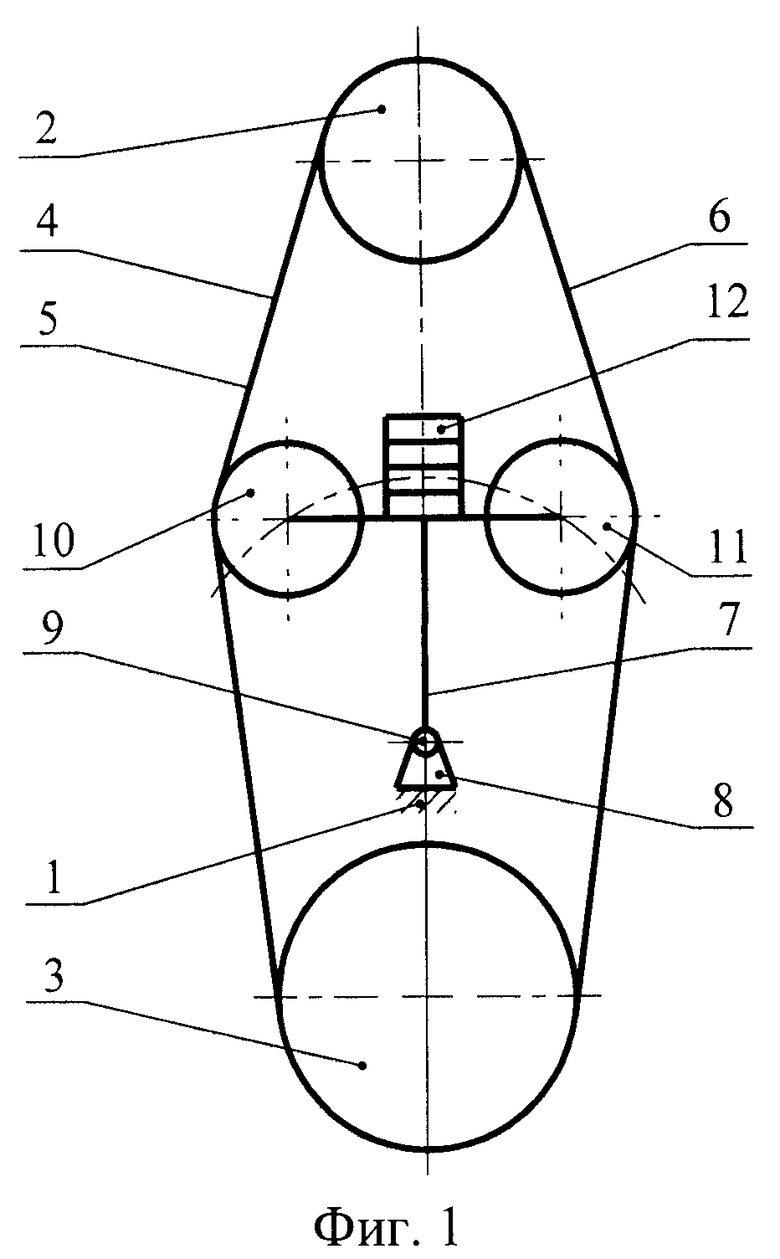
На фиг.1 изображено заявляемое устройство в статике, вид спереди;
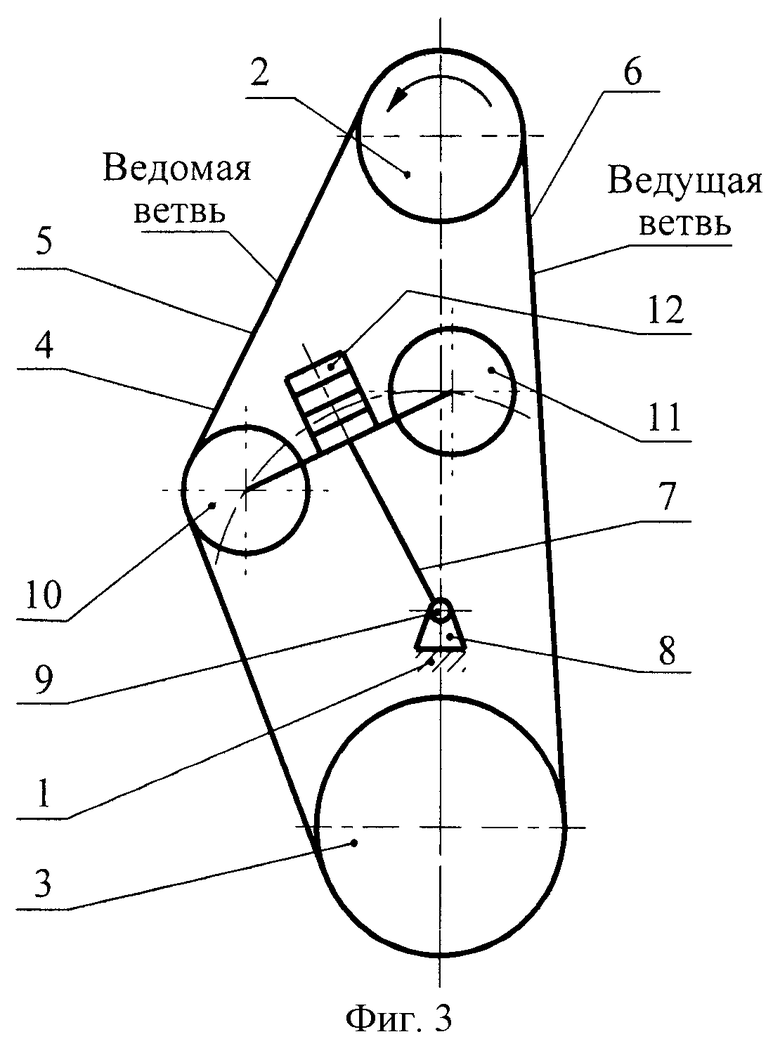
на фиг.2 изображено положение деталей устройства, изображенного на фиг.1, в работе, круговая стрелка показывает направление вращения ведущего ролика;
на фиг.3 изображено положение деталей устройства после реверса направления вращения ведущего ролика.
Устройство натяжения ветвей реверсивной передачи с бесконечным гибким элементом при ее работе размещено на станине 1 и содержит ведущий 2 и ведомый 3 ролики, соединенные гибкой связью 4, состоящей из двух ветвей 5 и 6, соединяющих ведущий 2 и ведомый 3 ролики. В плоскости расположения гибкой связи 4 помещен качающийся кронштейн 7, одним своим концом установленный в шарнире 8, закрепленном на станине 1. Ось 9 шарнира 8 находится на линии, соединяющей центры ведущего 2 и ведомого 3 роликов, и размешена параллельно их осям, расположенным в вертикальной плоскости. На другом конце качающегося кронштейна 7 шарнирно размещены два натяжных ролика 10 и 11, одинаково отстоящие от оси 9 шарнира 8 кронштейна 7, соприкасающийся каждый своим диаметром только с одной ветвью 5 или 6 гибкой связи 4. Между натяжными роликами 10 и 11 помещен груз 12, создающий усилия натяжения ветвей 5 или 6 гибкой связи 4. Расстояние между наружными крайними точками диаметров натяжных 5 и 6 роликов выполнено большим, чем диаметр наибольшего ведомого 3 ролика. Кронштейн 7, симметрично качающийся вокруг среднего своего положения при каждом реверсе в оси 9 шарнира 8, закрепленного на станине 1, в среднем своем положении расположен вертикально. В таком положении центры масс груза 12, натяжных роликов 10, 11, качающегося кронштейна 7 размещены в вертикальной плоскости расположения осей диаметров ведущего 2 и ведомого 3 роликов, и проходящей через ось 9 шарнира 8, и симметрично, относительно этой плоскости, в среднем вертикальном положении кронштейна 7.
На фиг.1 изображено вертикальное расположение качающегося на оси 9 шарнира 8 кронштейна 7 вместе с размещенными на нем натяжными роликами 10, 11 и грузом 12. Такое положение занимает физический маятник в состоянии неустойчивого статического равновесия и достаточно незначительного бокового усилия, чтобы нарушить это равновесие, после чего он качнется в ту или иную сторону и займет одно из двух своих устойчивых положений, справа или слева от вертикальной плоскости расположения осей диаметров ведущего 2 и ведомого 3 роликов, и проходящей через ось 9 шарнира 8, расположенного на станине 1. Это свойство физического маятника, находящегося в состоянии неустойчивого статического равновесия, и используется в заявляемом устройстве. При монтаже устройства, когда привод не работает, такое положение (см. фиг.1) появляется, когда соединяют концы гибкой связи 4, превращая ее в бесконечную замкнутую гибкую конструкцию, или устанавливают необходимое межосевое расстояние между ведущим 2 и ведомым 3 роликами. При включении привода ведущий ролик 2 начнет вращаться, например, по часовой стрелке (см. фиг.2), ветвь 5 гибкой связи 4, становясь ведущей, начинает двигаться к ведущему ролику 2 и стремится распрямиться на участке между ведущим 2 и ведомым 3 роликами. В результате чего ветвь 5 гибкой связи 4, толкая натяжной ролик 10 в сторону ведомой ветви 6 гибкой связи 4, двигающейся в противоположном направлении от ведущего ролика 2, выводит систему «натяжной ролик 10, - груз 12, - кронштейн 7» из положения неустойчивого статического равновесия, относительно оси 9 шарнира 8, закрепленного на станине 1. Натяжной ролик 10 отходит с гарантированным зазором от распрямившейся, ставшей ведущей ветви 5 гибкого элемента 4. Дальнейшее натяжение только одной идущей от ведущего ролика 2 ставшей ведомой ветвью 6 гибкого элемента 4 происходит за счет веса натяжных роликов 10, 11, кронштейна 7 и в основном груза 12. Натяжной ролик 10 отходит от ведущей ветви 5 гибкого элемента 4, идущей к ведущему ролику 2, увеличивая прогиб ведомой ветви 6, идущей от ведущего ролика 2, если этому не препятствует величина усилия предварительного натяжения гибкого элемента 4, при соединении его концов в бесконечную замкнутую гибкую конструкцию или установке необходимого межосевого расстояния между ведущим 2 и ведомым 3 роликами при монтаже. Возможно провисание гибкого элемента 4 при монтаже, которое не может быть больше величины натяжения от груза 12 ведомой ветви гибкого элемента, идущей от привода при его работе. Расстояние между крайними наружными точками диаметров натяжных роликов 10 и 11 выполнено большим, чем диаметр наибольшего ведущего 2 или ведомого 3 роликов (на фиг.1, 2, 3 изображен ведомый ролик 3 с большим диаметром). Это нужно для гарантированного первоначального отклонения любой ветвью 5 или 6 гибкого элемента 4 натяжного ролика 10 или 11 вместе с кронштейном 7 от вертикальной плоскости, проходящей через ось 9 шарнира 8, при их выпрямлении от изгиба натяжными роликами 10 или 11. Дальнейшее отклонение натяжного ролика, например, 10 в направлении ведомой ветви, например, 6 происходит от действия масс груза 12, кронштейна 7 и масс самих натяжных роликов 10 и 11. Расстояние от распрямившейся ветви 5 гибкого элемента 4 до наружного диаметра натяжного ролика 10 при работе передачи зависит от первоначального натяжения всего гибкого элемента 4 или даже величины его провисания при соединении его концов, превращая его в бесконечную замкнутую гибкую конструкцию, или при установке необходимого межосевого расстояния между ведущим 2 и ведомым 3 роликами при монтаже. Это расстояние при дальнейшей работе передачи может только увеличиваться за счет износа и вытягивания гибкого элемента от действия нагрузки и из-за нежесткости поддерживающих гибкий элемент конструкций. При реверсе вращения ведущего ролика 2 (см. фиг.3) ветвь 6 гибкого элемента 4, начинает двигаться к ведущему ролику 2, который стал вращаться в противоположном направлении (против хода часовой стрелки). Ветвь 6, становясь ведущей, от тянущих усилий ведущего ролика 2 начинает распрямляться и толкать натяжной ролик 11 в сторону ветви 5 гибкого элемента 4, идущей от ведущего ролика 2, и ставшей ведомой. Натяжение ветви 5 гибкого элемента 4 ослабевает, т.к. она уже нагрузку не несет. Натяжной ролик 11 вместе с кронштейном 7 и грузом 12 занимают положение своей статической неустойчивости (см. фиг.1), из которого их выводит окончательно распрямившаяся, ставшая ведущей ветвь 6 гибкого элемента 4. Натяжной ролик 11 отходит с гарантированным зазором от распрямившейся, ставшей ведущей ветви 6 гибкого элемента 4. Дальнейшее натяжение только одной идущей от ведущего ролика 2 ставшей ведомой ветвью 5 гибкого элемента 4 происходит за счет веса натяжных роликов 10, 11, кронштейна 7 и в основном груза 12. Поэтому для уменьшения веса груза 12, не снижая его эффективности, груз 12 надо располагать в наивысших точках кронштейна 7, как можно дальше от оси 9 шарнира 8. Груз 12 может быть постоянной или переменной массы, может закрепляться по длине кронштейна 7 жестко или подвижно, располагаться выше, ниже или на уровне натяжных роликов 10, 11, но обязательно выше оси 9 шарнира 8 кронштейна 7. Усилие натяжения ветвей 5 или 6 гибкой связи 4 зависит от величины массы груза 12, расстояния на кронштейне 7 между грузом 12 и осью 9 его качания и от угла отклонения кронштейна 7 от своего среднего вертикального положения. Расположение оси 9 шарнира 8 в вертикальной плоскости расположения осей диаметров ведущего 2 и ведомого 3 роликов нужно для одинаковых углов отклонения кронштейна 7 в обе стороны от вертикального своего положения, т.е. при симметричном его качании относительно своего среднего положения. Груз 12, шарнир 8, закрепленный на станине 1, и часть кронштейна 7, не связанную с натяжными роликами 10, 11, можно выносить за пределы плоскости расположения гибкой связи 4, выдерживая расположение оси 9 шарнира 8 в вертикальной плоскости расположения осей диаметров ведущего 2 и ведомого 3 роликов. Симметричное расположение масс кронштейна 7, натяжных 10, 11 роликов и груза 12 при вертикальном положении кронштейна 7 нужно для одинаковых усилий натяжения ветвей 5 или 6 гибкой связи 4 при отклонении кронштейна 7 влево - вправо на одинаковые углы.
На приведенных чертежах (см. фиг.1, 2, 3) изображено расположение натяжных роликов 10, 11 внутри ветвей 5 и 6 гибкой связи 4. При расположении натяжных роликов 10, 11 снаружи движущихся в противоположных направлениях ветвей 5 и 6 гибкого элемента 4 расстояние между ближайшими точками диаметров натяжных роликов 10, 11 должно быть меньшим, чем диаметр наименьшего из ведущего 2 или ведомого 3 роликов. При таком расположении натяжных роликов появляется дополнительный изгиб в противоположную сторону ветвей 5 и 6 гибкой связи 4, при огибании ими натяжных роликов 10 и 11 во время работы устройства, что уменьшает срок службы гибкой связи 4 из-за ее знакопеременного изгиба.
Заявляемое устройство позволяет использовать натяжение при каждом реверсе только одной ведомой ветви бесконечной гибкой связи в передаче. Для перевода натяжных роликов с одной ветви гибкой связи на другую при реверсе не требуется дополнительной энергии со стороны, эта энергия уже накоплена в грузе, поднятом вертикально вверх и расположенном на кронштейне выше его оси качания. Энергия начнет освобождаться при отклонении качающегося кронштейна с размещенным на нем грузом выше оси от вертикального его положения. Чем больше будет отклонение от вертикали, тем больше будет освобождаться энергии для натяжения только одной ненагруженной идущей от привода ведомой ветви гибкой связи. Отклоняет кронштейн от вертикали и выводит один направляющий ролик из контакта с ведущей ветвью гибкой связи при каждом реверсе, распрямляющийся в прямую линию от тянущих усилий ведущего ролика участок гибкой связи, находящийся между ведущим и ведомым роликами, и отклоненный от прямой линии при монтаже, размерами или расположением натяжных роликов. Такими свойствами прототип не обладает.
Заявляемое устройство можно применять и в реверсивных передачах с гибкой связью при расположении осей ведущего и ведомого роликов в плоскостях от вертикальной до горизонтальной и даже размещать саму плоскость расположения гибкой связи горизонтально. В таких случаях придется учитывать провисание от собственного веса горизонтально или под углом к горизонту расположенных этих ветвей гибкой связи. При этом количество подвижных деталей, участвующих в реверсе, увеличится и конструкция устройства натяжения усложнится.
Вместо груза, размещенного на кронштейне, можно применять пружину, под действием которой кронштейн стремится занять только одно из двух своих предельных, устойчивых положений, дойдя до одного из двух упоров, симметрично расположенных по обе стороны кронштейна. Подобное показано, например, в простейших рычажных механизмах переключения, включения и выключения, изображенных в книге Артоболевского И.И. «Механизмы в современной технике», 
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНОЕ УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВОДНОЛЫЖНИКОВ | 2017 |
|
RU2651419C1 |
| Передача с гибкой связью | 1979 |
|
SU894274A1 |
| УСТРОЙСТВО ДЛЯ СМАТЫВАНИЯ В БОБИНЫ И РАСКЛАДКИ ГИБКИХ ПОЛИВНЫХ ТРУБОПРОВОДОВ СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ | 2009 |
|
RU2435366C2 |
| Устройство для принудительной подачи нити с реверсивным движением нитеводителя | 1973 |
|
SU464671A1 |
| СТЕКЛООЧИСТИТЕЛЬ | 2011 |
|
RU2480358C1 |
| Устройство для натяжения реверсивных передач с гибкой связью | 1981 |
|
SU1013660A1 |
| Натяжное устройство | 1973 |
|
SU596765A1 |
| Передача с гибкой связью | 1982 |
|
SU1084517A1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| Устройство для подачи воды к поливным машинам в движении | 1978 |
|
SU692596A1 |
Изобретение относится к натяжным устройствам для реверсивных передач с гибкой связью. Устройство натяжения ветвей реверсивной передачи с бесконечным гибким элементом при ее работе размещено на станине (1) и содержит ведущий (2) и ведомый (3) ролики, соединенные гибкой связью (4), состоящей из двух ветвей (5) и (6). В плоскости расположения гибкой связи (4) помещен качающийся кронштейн (7), одним свои концом установленный в шарнире (8), закрепленном на станине (1). На другом конце качающегося кронштейна (7) шарнирно размещены два натяжных ролика (10) и (11). Между натяжными роликами (10) и (11) помещен груз (12), создающий усилия натяжения ветвей (5) и (6) гибкой связи (4), размещенный на кронштейне (7) выше шарнира (8). Обеспечивается увеличение срока службы гибкой связи в передаче. 3 ил.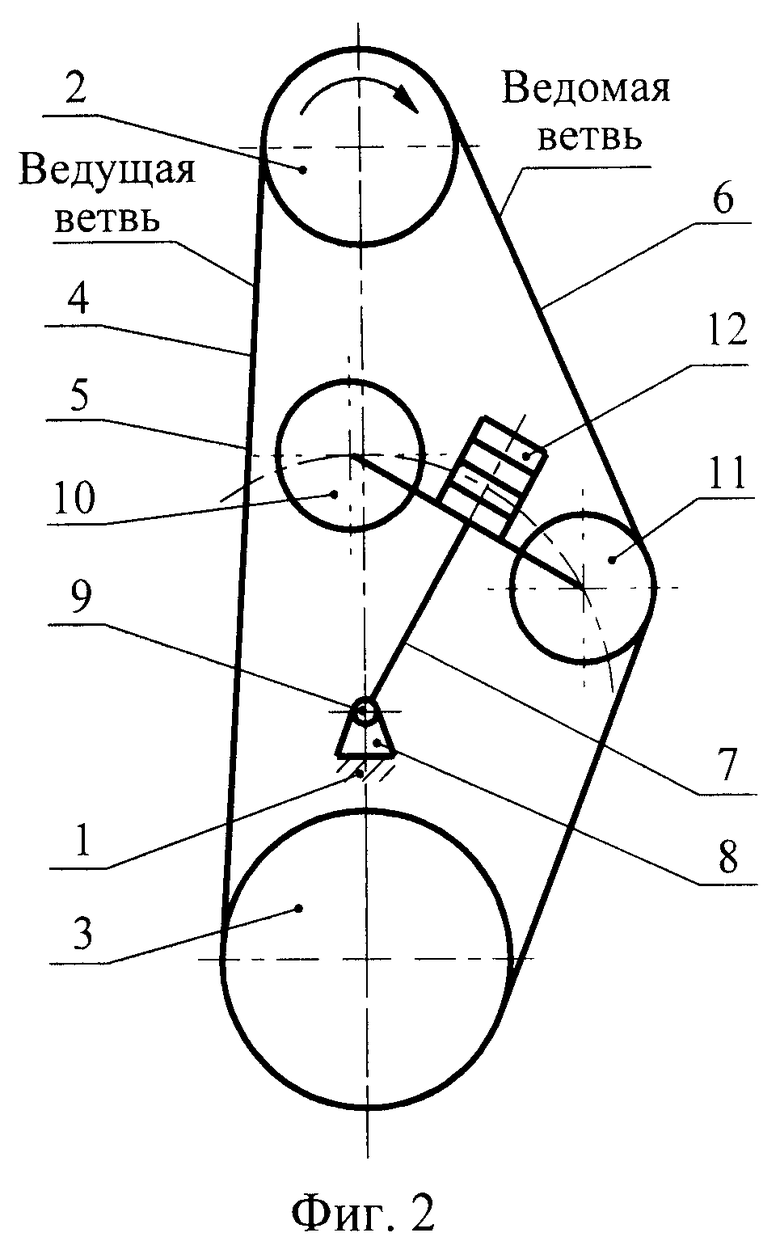
Натяжное устройство для реверсивных передач с гибкой связью, содержащее шарнирно установленный на станине, в плоскости расположения гибкой связи, качающийся кронштейн со своей осью качания, расположенной в вертикальной плоскости осей диаметров ведущего и ведомого роликов, с шарнирно закрепленными на нем двумя натяжными роликами, одинаково отстоящими от оси качания кронштейна, соприкасающийся каждый своим диаметром только с одной ветвью гибкой связи, и грузом, создающим усилия натяжения гибкой связи, отличающееся тем, что расстояние между крайними наружными точками диаметров натяжных роликов выполнено большим, чем диаметр наибольшего ведущего или ведомого роликов, а кронштейн, симметрично качающийся вокруг среднего положения при каждом реверсе в шарнире, закрепленном на станине, в среднем своем положении расположен вертикально, а шарнирно закрепленные на нем два натяжных ролика выполнены, каждый в своем крайнем положении, отклоняющими только одну ветвь гибкой связи, идущую от ведущего ролика, причем создающий одинаковые усилия натяжения только одной ветви гибкого элемента при каждом реверсе груз размещен на кронштейне выше шарнира, а центры масс груза, натяжных роликов, качающегося кронштейна размещены в вертикальной плоскости расположения осей диаметров ведущего и ведомого роликов, проходящей через ось шарнира, и симметрично, относительно этой плоскости, в среднем вертикальном положении кронштейна.
| Способ получения соды путем продувания восстановителя через расплавленный сульфат натрия | 1949 |
|
SU77927A1 |
| 1971 |
|
SU413314A1 | |
| Передача гибкой связью | 1989 |
|
SU1716221A1 |
| US 2010255944 A1, 07.10.2010 | |||

