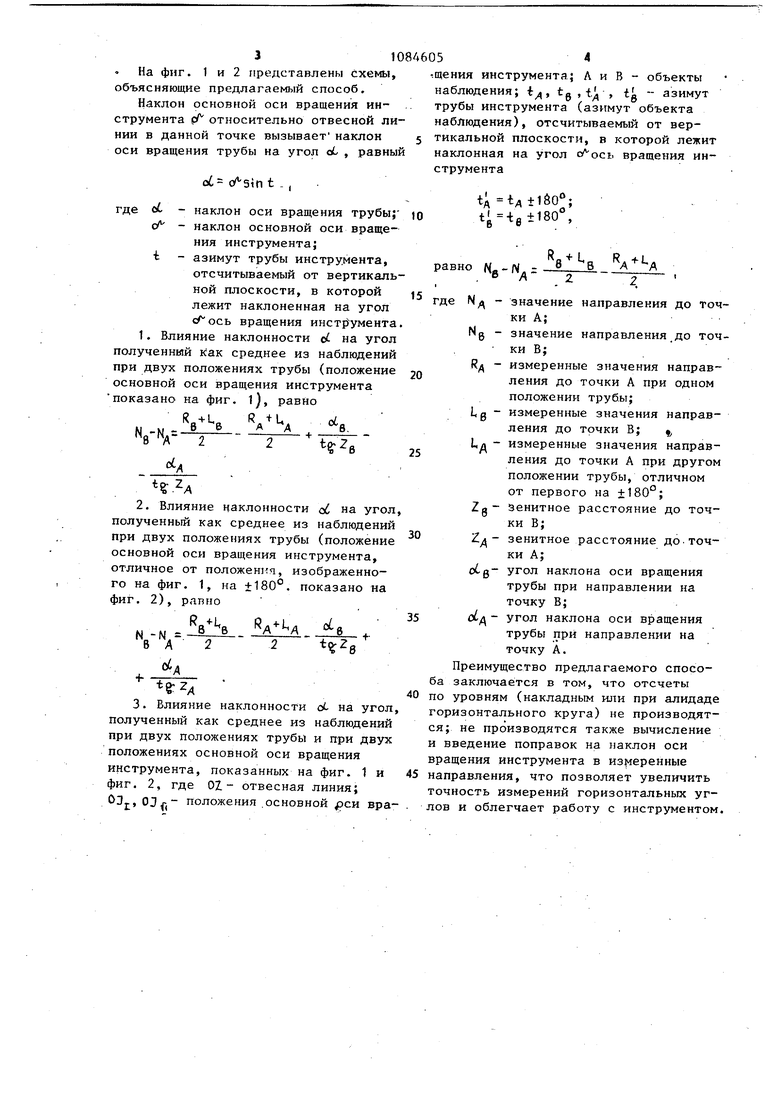
t Изобретение относится к геодезии и предназначено для использования при угловых измерениях, которые производятся при помощи высокоточных инструментов, преимущественно теодол тов. Известен способ определения ошибки, вызванной наклоном основной (вер тикальной) оси вращения инструмента. Наклонность основной оси вращения геодезического инструмента относительно отвесной линии в данной точке вызывает наклон оси вращения трубы, влияние которого не исключается из результатов измерений. Поэто му на наклон вертикальной оси инструмента необходимо вводить соответствующие проправки. Это относится особенности, к горным районам работ и крупным городам, где колебания зенитных расстояний могут быть значительными. Общая наклонность оси вращения трубы, являющаяся следствие наклона основной оси вращения инстру мента и неправильности вращения алид ды, определяется с помощью уровня (накладного типа при алидаде горизон тального круга) 11 J Недостатком такого способа являет ся возникновение ошибок, полученных в результате отсчета по уровням, а также необходимость вычисления и введения поправок, вызванных наклоном основной оси вращения инструмента в измеренные направления. При этом имеет место влияние инструментальных ошибок, в частности, из-за наклонности оси вращения трубы и основной оси вращения инструмента. Наклонность оси вращения трубы являе ся следствием наклона основной оси вращения инструмента и неравенства подставок трубы, включая и неравенст во диаметров цапф. Полагая, что наклонность горизонтальной оси обусловлена только неравенством подставок трубы, включая и неравенство диаметро цапф, измерения производят ся при двух положениях трубы. Цель изобретения - повьш1ение производительности труда путем устранения операций по вычислению и введени поправок, вызванных наклоном основно оси вращения инструмента в измеренны направления. Указанная цель достигается тем, что согласно способу, заключающемуся в установке основной оси вращения ин 05 струмента в вертикальное положение, выполнении программы измерений при двух положениях вертикального круга, усреднении и обработке материалов, угловые измерения пр.оводят при двух положениях основной оси вращения инструмента, различающр1хся между собой на ±180, причем перестановку оси производят после завершения одной полупрограммы измерений, затем осуществляют вторую полупрограмму измере НИИ и усредняют значения измеренных углов. Способ осуществляют в следующей последовательности. Производят серию угловых измерений на местности при двух положениях трубы, различающихся между собой на tlSO, получают по два результата измерений для каждого угла. Результаты измерений усредняют. Так производят измерения углов в полупрограммах при неизменном положении основной оси вращения инструмента. Переход от одной полупрограммы измерений к другой достигается путем изменения положения основной оси вращения инструмента. Новое положение вертикальной оси, отличающееся от прежнего на +180 , позволяет произвести вторую полупрограмму измерений горизонталь.ных углов, аналогичную первой. Изменение положения основной оси вращения инструмента достигается путем поворота нижней части инструмента (или всего инструмента в зависимости от его типа) в подставке (или вместе с подставкой) на ±180°, после чего величины измеренных углов из двух полупрограмм усредняются. Так как изобретение распространяется на геодезические инструменты различных классов и типов, у которых вертикальная оси вращения проходит через различные части инструмента, то изменение положения основной оси производится с учетом конструктивных особенностей инструментов. В основу способа положено свойство синуса азимута трубы изменять знак на противоположный при изменении азимута трубы на ±180. Таким образом, среднее из приемов при двух положениях основной оси вращения инструмента, различающихся на +180, будет свободно от влияния ошибки, вызванной наклоном основной оси вращения инструмента. На фиг. 1 и 2 представлены схемы, объясняющие предлагаемый способ. Наклон основной оси вращения инструмента относительно отвесной линии в данной точке вызывает наклон оси вращения трубы на угол cL , равный cL- сЛ51П t . , cs6 - наклон оси вращения трубы; сА - наклон основной оси вращения инструмента; t - азимут трубы инструмента, отсчитываемый от вертикаль ной плоскости, в которой лежит наклоненная на угол вращения инструмента 1. Влияние наклонности {/ на угол полученный Как среднее из наблюдений при двух положениях трубы (положение основной оси вращения инструмента показано на фиг. l), равно W-V2. Влияние наклонности oi на угол полученный как среднее из наблюдений при двух положениях трубы (положение основной оси вращения инструмента, отличное от положения, изображенного на фиг. 1, на ±180°. показано на фиг. 2), равно 420 3. Влияние наклонности oi- на угол полученный как среднее из наблюдений при двух положениях трубы и при двух положениях основной оси вращения инструмента, показанных на фиг. 1 и фиг. 2, где OZ - отвесная линия; ODj, положения .основной эси вра щения инструмента; Л и В - объекты наблюдения; tg,-t , tg - азимут трубы инструмента (азимут объекта наблюдения), отсчитываемый от вертикальной плоскости, в которой лежит наклонная на угол оЛось вращения инструментаt; tA±lgO°; t ie±180 . равно |y(.;v .А . ° А 2 2 где N - значение направления до точки А; Ng - значение направления.до точки В; R - измеренные значения направления до точки А при одном положении трубы; 1,0 - измеренные значения направления до точки В; f, L, л - измеренные значения направления до точки А при другом положении трубы, отличном от первого на ±180°; Zfl- зенитное расстояние до точки В; 2д - зенитное расстояние до.точки А; d-Q- угол наклона оси вращения трубы при направлении на точку В; - угол наклона оси вращения трубы при направлении на точку А. Преимущество предлагаемого способа заключается в том, что отсчеты по уровням (накладным или при алидаде горизонтального круга) не производятся; не производятся также вычисление и введение поправок на наклон оси вращения инструмента в из| еренные направления, что позволяет увеличить точность измерений горизонтальных углов и облегчает работу с инструментом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения уклонений отвесной линии и устройство для его реализации | 2020 |
|
RU2750999C1 |
| ТЕОДОЛИТ | 1994 |
|
RU2079104C1 |
| Приспособление к теодолиту для определения направления меридиана по солнцу | 1940 |
|
SU59480A1 |
| Устройство для измерения зенитных расстояний и рефракции | 1984 |
|
SU1295229A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА И ШИРОТЫ ПО НЕИЗВЕСТНЫМ ЗВЕЗДАМ | 2012 |
|
RU2497076C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРУЧЕНИЯ ОБЪЕКТА | 1986 |
|
RU1400226C |
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| Геодезический измерительный прибор | 1945 |
|
SU67857A1 |
| Способ проверки положения конструкций корпуса судна | 1982 |
|
SU1137297A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ АСТРОЛЯБИЕЙ | 1989 |
|
RU2107895C1 |

СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ НАКЛОНА ОСНОВНОЙ ОСИ ВРАЩЕНИЯ ИНСТРЗ ЕНТА ПРИ УГЛОВЫХ ИЗМЕРЕНИЯХ, заключающийся в установке основной оси вращения инструмента в вертикальJsisbiiijiiienA ное положение, вьшолнении программы измерений при двух положениях вертикального круга, устреднении и . обработке материалов, отличающийся тем, что, с целью повышения производительности труда, угловые измерения проводят при двух положениях основной оси вращения инструмента, различающихся между собой на , причем перестановку оси производят после завершения одной jполупрограммы измерений, затем осуществляют вторую полупрограмму измерений, и усредняют значение измерен ньпс углов. (П сх 4i О О ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Справочник геодезиста, М., Недра, 1966, с | |||
| Способ обогащения руд | 1915 |
|
SU440A1 |
