Изобретение относится к области астрономической геодезии, в частности, к области измерений уклонений отвесной линии (УОЛ) с помощью зенитных телескопов.
В астрономической геодезии УОЛ определяется как угол между направлением отвесной линии, являющейся нормалью к поверхности геоида в данной точке поверхности Земли, и направлением нормали к поверхности земного эллипсоида в этой же точке. Направление отвесной линии соответствует центру поля зрения зенитного телескопа, выставленного по нормали к поверхности геоида. Измеренные астрономические координаты центра поля зрения телескопа - астрономическая широта и долгота - обозначаются, соответственно, как Ф, Λ. Направление нормали к поверхности земного эллипсоида однозначно определяется через геодезическую широту и долготу точки размещения зенитного телескопа - B, L, соответственно. Составляющие УОЛ по широте ξ и по долготе η на основе этих координат определяются по известной формуле [1]:

Известен способ измерения УОЛ с помощью зенитного телескопа (будем в дальнейшем использовать термин астроизмеритель), приведенный в работах [2-3]. В известном способе геодезические координаты определяются с использованием геодезического ГНСС-приемника (ГНСС - Глобальная Навигационная Спутниковая Система), использующего спутниковые системы навигации ГЛОНАСС/GPS, а астрономические координаты определяются с помощью зенитного телескопа, оснащенного астрономической ПЗС-камерой (ПЗС - прибор с зарядовой связью) и высокоточным инклинометром, определяющим направление нормали к поверхности геоида.
Способ включает следующие операции:
1. Калибруют астроизмеритель перед началом астрономических измерений для определения его калибровочных коэффициентов. Затраты наблюдательного времени на калибровку составляют около 30 минут.
2. Измеряют геодезические координаты точки размещения астроизмерителя на поверхности земного эллипсоида B, L с помощью геодезического ГНСС-приемника. Это необходимо для определения положения нормали к земному эллипсоиду в точке измерений при вычислении УОЛ.
3. С помощью астрономической камеры телескопа получают кадры изображения звездного неба при фиксированном начальном азимуте поворота телескопа вокруг вертикальной оси и измеряют астрономические координаты центра поля зрения (центра кадра изображения) зенитного телескопа Ф, Λ. Для этого по астрономическим координатам звезд, находящихся в кадре, с помощью звездного каталога определяют искомые астрономические координаты центра кадра, т.е центра поля зрения телескопа.
4. Поворачивают телескоп вокруг вертикальной оси на 180 градусов, снова получают кадры изображения звездного неба при новом азимуте поворота телескопа и снова измеряют астрономические координаты центра поля зрения (центра кадра изображения) зенитного телескопа Ф,Λ.
5. Вычисляют среднее значение астрономических координат центра поля зрения телескопа Фср, Λcp по двум измерениям, соответствующим двум азимутам телескопа.
6. На основе измеренных геодезических координат B, L и астрономических усредненных координат Фср, Λcp, вычисляют составляющие УОЛ по формуле (1).
Известно устройство для реализации этого способа, приведенное в работах [2-3]. Составными элементами устройства являются: зенитный телескоп, установленный на устройстве для фиксированного поворота телескопа вокруг вертикальной оси; астрономическая ПЗС-камера для получения кадров оптических изображений звезд («звездного рисунка»); высокоточный инклинометр, измеряющий углы отклонения устройства от плоскости горизонта по геоиду; геодезический ГНСС-приемник, а также устройство управления и обработки результатов измерений. При этом астрономическая ПЗС-камера жестко присоединена к объективу телескопа, а инклинометр располагается на устройстве для фиксированного поворота телескопа вокруг вертикальной оси.
Недостатками известного способа и устройства являются ограниченная точность, что объясняется непостоянством значений калибровочных коэффициентов в течение измерительной ночи, а также ограниченная производительность измерений, поскольку часть наблюдательного времени используется для калибровки.
Также известен способ измерения УОЛ приведенный в работе [4]. В известном способе геодезические координаты определяются с использованием геодезического ГНСС-приемника, а астрономические координаты определяются с помощью зенитного телескопа, оснащенного астрономической ПЗС-камерой и высокоточным инклинометром, определяющим направление нормали к поверхности геоида. В целом, процедура измерений и обработки результатов измерений способа идентична первому способу описанному в работах [2-3]. Отличие лишь в том, что усреднение астрономических координат происходит по измерениям, выполненным при четырех, а не двух азимутах поворота телескопа: 0°, 90°, 180°, 270°.
Способ включает следующие операции:
1. Перед началом астрономических измерений астроизмеритель калибруют для определения его калибровочных коэффициентов. Эти коэффициенты включают масштабные коэффициенты осей инклинометра, угол скрещивания осей инклинометра и углы взаимной ориентации осей инклинометра и астрономической ПЗС-камеры и др.
Необходимые, но непроизводительные затраты наблюдательного времени на калибровку составляют около 30 минут.
2. Измеряют геодезические координаты точки размещения астризмерителя на поверхности земного эллипсоида B, L с помощью геодезического ГНСС-приемника. Это необходимо для определения положения нормали к земному эллипсоиду в точке измерений при вычислении УОЛ.
3. С помощью астрономической камеры телескопа получают кадры изображения звездного неба при фиксированном начальном азимуте поворота телескопа вокруг вертикальной оси и измеряют астрономические координаты центра поля зрения (центра кадра изображения) зенитного телескопа Ф, Λ. Для этого по астрономическим координатам звезд, находящихся в кадре, с помощью звездного каталога определяют искомые астрономические координаты центра кадра, т.е центра поля зрения телескопа.
4. Поворачивают телескоп вокруг вертикальной оси по азимуту последовательно на 90°, на 180°, на 270°, в каждом положении телескопа получают кадры изображения звездного неба и четыре раза измеряют астрономические координаты центра поля зрения (центра кадра изображения) зенитного телескопа Фi, Λi, (i=1, 2, 3, 4).
5. Вычисляют среднее значение астрономических координат центра поля зрения телескопа Фср, Λср по четырем измерениям, соответствующим четырем азимутам телескопа.
6. На основе измеренных геодезических координат B, L и астрономических усредненных координат Фср, Λcp вычисляют составляющие УОЛ по формуле (1).
Известно устройство для реализации данного способа, приведенное в работе [4]. Составными элементами устройства являются (Фиг. 1):
1 - труба зенитного телескопа;
2 - астрономическая ПЗС-камера;
3 - геодезический ГНСС-приемник;
4 - устройство управления и обработки;
5 - инклинометр;
6 - устройство для фиксированного поворота телескопа по азимуту на 0°, 90°, 180°, 270°.
При этом труба зенитного телескопа 1 жестко установлена на устройстве для фиксированного поворота телескопа по азимуту 6, астрономическая ПЗС-камера 2 жестко прикреплена к трубе зенитного телескопа 1 со стороны объектива, инклинометр 5 жестко закреплен на устройстве для фиксированного поворота телескопа по азимуту 6, электрические выходы составных элементов 2, 3, 5 и 6 присоединены к устройству управления и обработки 4.
Геодезический ГНСС-приемник 3 предназначен для измерения геодезических координат точки размещения астроизмерителя на поверхности земного эллипсоида; астрономическая ПЗС-камера 2 предназначена для получения кадров оптических изображений звезд («звездного рисунка») для обеспечения измерения астрономических координат центра кадра изображения; высокоточный инклинометр 5 предназначен для измерения углов отклонения устройства 6 от горизонтальной плоскости, определяемой относительно геоида; устройство управления и обработки 4 предназначено для управления поворотами телескопа и вычисления составляющих УОЛ по результатам измерений.
Недостатками известного способа и устройства являются:
- во-первых, ограниченная точность, что объясняется непостоянством значений калибровочных коэффициентов в течение измерительной ночи вследствие влияния изменений температуры в процессе измерений, изменений атмосферного давления, изменений наклона грунтового основания, на котором размещается прибор и др.;
- во-вторых - ограниченная производительность измерений (количество наблюдаемых точек за ночь), поскольку часть наблюдательного времени (около 30 минут) используется для калибровки астроизмерителя;
- в-третьих, сложностью применения способа и устройства в полевых условиях, поскольку они требуют заранее подготовленных жестких оснований (бетонных, металлических и др.).
Данные способ и устройство приняты за прототип.
Техническим результатом, получаемым от внедрения изобретений, является повышение точности и производительности измерений УОЛ, а также упрощение условий их применения в полевых условиях. В основе предлагаемого способа лежит новый принцип определения составляющих УОЛ: по компонентам нормированного вектора силы тяжести.
Данный технический результат достигается за счет того, что в способе определения уклонения отвесной линии, основанного на наблюдениях звездного неба с помощью наземного зенитного телескопа, оснащенного астрономической камерой с матричным фотоприемником, определении его геодезических координат с помощью ГНСС-приемника, измерении углов отклонения телескопа от горизонтальной плоскости с помощью инклинометра, перед первой серией наблюдений предварительно наклоняют строительную ось трубы телескопа относительно оси вращения монтировки на некоторый угол ε1. Проводят первый цикл наблюдений звездного неба более чем в пяти стационарных положениях телескопа при вращении его монтировки вокруг вертикальной оси. В каждом положении телескопа первой серии наблюдений фиксируют кадр изображения звездного неба и запоминают все кадры первой серии наблюдений с вспомогательной информацией в отдельном файле 1. Наклоняют строительную ось трубы телескопа на другой угол ε2 и проводят вторую серию наблюдений звездного неба более чем в пяти стационарных положениях телескопа при вращении его монтировки вокруг вертикальной оси. В каждом положении телескопа второй серии наблюдений снимают кадр изображения звездного неба и запоминают все кадры второй серии наблюдений с вспомогательной информацией в отдельном файле 2. Всего проводят N серий наблюдений при N углах наклона строительной оси трубы телескопа и формируют N файлов наблюдений. В каждом кадре всех файлов наблюдений определяют координаты наблюдаемых звезд х, у относительно системы координат кадра изображения, затем выполняют идентификацию звезд кадров изображения с использованием звездного каталога и определяют параметры преобразований между координатами звезд х, у и экваториальными координатами α, δ звезд из каталога, с использованием которых осуществляется преобразование координат центра кадра (центра матричного фотоприемника астрономической камеры) в экваториальные координаты и определяют полную матрицу параметров поворота А из местной системы координат в систему координат матричного фотоприемника астрономической камеры. По результатам обработки всех измерений формируют целевую функцию, зависящую от 10 неизвестных параметров: двух текущих значений компонент nx, ny нормированного вектора силы тяжести, пяти параметров инклинометра mx, my, ε, kx, ky и трех углов взаимной ориентации осей систем координат центра матричного фотоприемника и инклинометра ϕ, θ, ψ. По результатам минимизации целевой функции в каждой серии определяют все 10 неизвестных коэффициентов астроизмерителя. По оцененным значениям компонент нормированного вектора силы тяжести вычисляют текущие значения составляющих УОЛ. При этом измерения в каждой серии могут выполняться в произвольных направлениях оптической оси телескопа, при произвольных углах в горизонтальной плоскости и отличаться от серии к серии.
А в известном устройстве, для реализации способа, содержащим зенитный телескоп, астрономическую камеру на основе матричного фотоприемника, соединенную с объективом телескопа, инклинометр, геодезический ГНСС-приемник, устройство для пошагового поворота телескопа в горизонтальной плоскости вокруг его строительной оси, устройство управления и обработки, дополнительно введено устройство для обеспечения фиксированных наклонов оси телескопа относительно плоскости его пошагового поворота, причем это дополнительное устройство соединено с устройством пошагового поворота телескопа в горизонтальной плоскости и с трубой телескопа, а инклинометр жестко закреплен на трубе телескопа.
Изобретение поясняется чертежами. На фиг. 1 представлено устройство прототипа; на фиг. 2 представлена одна из схем практической реализации заявляемого способа; на фиг. 3 - схема устройства для реализации предлагаемого способа; на фиг. 4 - график погрешности определения составляющих УОЛ. Процесс измерений предполагает дискретный многошаговый поворот телескопа, астрономической камеры и инклинометра вокруг вертикальной оси с установленным количеством шагов (стационарных дискретных положений) в горизонтальной плоскости, Этот процесс совершается дважды - с зенитным углом ε1 (первый цикл наблюдений) и с зенитным углом ε2 (второй цикл наблюдений). Общее количество дискретных положений телескопа при многошаговом повороте при двух зенитных углах должно быть не менее десяти.
При известных значениях компонент вектора силы тяжести g составляющие УОЛ можно найти по следующим известным формулам [1]:

Если нормировать вектор силы тяжести g и представить его в виде:

то формула (2) для искомых составляющих УОЛ примет вид:

Таким образом, в предлагаемом способе определение значений составляющих УОЛ сводится к вычислению компонент нормированного вектора силы тяжести n по астрономическим измерениям.
Предлагаемый способ, как и способ-прототип, основан на использовании зенитного телескопа, астрономической ПЗС-камеры, инклинометра и ГНСС-приемника. Он включает следующие операции:
1. Измеряют геодезические координаты точки размещения астроизмерителя в режиме астроизмерений на поверхности земного эллипсоида с помощью геодезического ГНСС-приемника.
2. Отклоняют строительную ось трубы зенитного телескопа относительно нормали к поверхности геоида на угол ε1;
3. Поворачивают трубу телескопа по азимуту вокруг вертикальной строительной оси дискретно на угол 72° или менее до завершения полного оборота.
4. В каждом из 5 и более стационарных положений телескопа при его дискретных поворотах вокруг вертикальной оси получают и фиксируют кадры оптических изображений звездного неба («звездного рисунка»), снимают результаты измерений инклинометра по двум осям, время экспозиции и температуру окружающей среды;
5. Отклоняют строительную ось трубы зенитного телескопа относительно нормали к поверхности геоида на угол ε2, превышающий угол ε1. При этом угол ε2 должен находиться в диапазоне измерений инклинометра;
6. Снова в каждом из 5 и более стационарных положений телескопа при его дискретных поворотах вокруг вертикальной оси получают и фиксируют кадры оптических изображений звездного неба («рисунка звезд»), снимают результаты измерений инклинометра по двум осям, время экспозиции и температуру окружающей среды;
7. В каждом кадре звездного неба во всех положениях телескопа определяют координаты звезд х, у относительно системы координат (СК) кадра изображения, выполняют идентификацию звезд из кадра с использованием звездного каталога, определяют параметры преобразований между координатами х, у звезд из кадра и экваториальными координатами α,δ звезд из звездного каталога и осуществляют преобразование координат центра кадра хц, уц (центра поля зрения оптического приемника астрономической камеры) в экваториальные координаты αц, δц. Затем на основе αц, δц и параметров астрокамеры определяют матрицу параметров ориентации А системы координат приемника астрономической камеры в местной топоцентрической системе координат.
8. По результатам обработки всех измерений формируют целевую функцию, зависящую от 10 неизвестных параметров: двух текущих значений компонент nx, ny нормированного вектора силы тяжести и восьми калибровочных коэффициентов: двух текущих значений компонент nx, ny нормированного вектора силы тяжести, пяти параметров инклинометра mx, my, ε, kx, ky и трех углов взаимной ориентации осей ПЗС-сенсора астрономической камеры и инклинометра ϕ, θ, ψ;
9. Минимизируют целевую функцию в каждой серии и определяют все 10 неизвестных параметров, в том числе искомые компоненты нормированного вектора силы тяжести.
10. По найденным значениям компонент нормированного вектора силы тяжести, вычисляют текущие значения составляющих УОЛ по формулам (4).
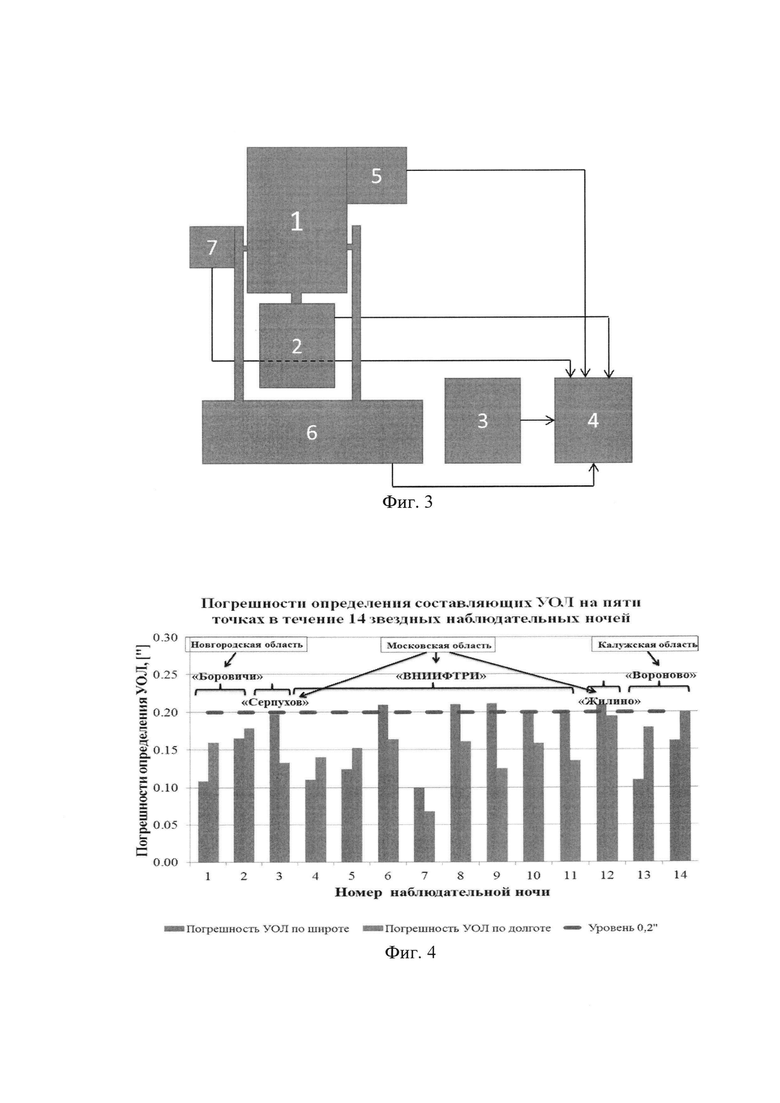
Схема устройства для реализации способа представлена на фиг. 3.
Предлагаемое устройство включает следующие элементы:
1 - труба телескопа;
2 - астрономическая камера на основе матричного фотоприемника;
3 - геодезический ГНСС-приемник;
4 - устройство управления и обработки;
5 - высокоточный инклинометр;
6 - устройство для фиксированного пошагового поворота телескопа вокруг строительной оси (монтировка телескопа);
7 - устройство для обеспечения фиксированного наклона оси телескопа к плоскости поворота.
При этом труба зенитного телескопа 1 жестко установлена на устройстве для фиксированного пошагового поворота телескопа по азимуту 6; астрономическая камера 2 жестко прикреплена к трубе зенитного телескопа 1 со стороны объектива; инклинометр 5 жестко закреплен на трубе телескопа 1; устройство для обеспечения фиксированного наклона оси телескопа к плоскости поворота 7 размещено на устройстве 6 и жестко соединено с трубой телескопа 1; электрические входы и выходы элементов 2, 3, 5, 6 и 7 присоединены к устройству управления и обработки 4.
Геодезический ГНСС-приемник 3 предназначен для измерения геодезических координат зенитного телескопа на поверхности земного эллипсоида в каждой точке астроизмерений; астрономическая камера 2 предназначена для получения кадров оптических изображений звезд («звездного рисунка»); высокоточный инклинометр 5 предназначен для измерения углов отклонения от горизонтальной плоскости, определяемой относительно поверхности геоида и контроля текущей температуры; устройство 7 предназначено для обеспечения фиксированного наклона оси телескопа к горизонтальной плоскости его поворота по азимуту; устройство управления и обработки 4 предназначено для обработки результатов измерений, формирования и минимизации целевой функции, а также вычисления составляющих УОЛ по результатам измерений.
Отличие предлагаемого устройства от устройства-прототипа заключается в дополнительно введенном устройстве, предназначенном для обеспечения фиксированных наклонов оси телескопа к горизонтальной плоскости его поворота по азимуту, а также тем, что высокоточный инклинометр жестко размещают на трубе телескопа. В качестве матричных фотонриемников могут использоваться приемники на приборах с зарядовой связью (ПЗС-матрицы), приемники на КМОП-технологиях (комплементарных структурах металл-оксид-полупроводник) и др.
Предлагаемый способ и устройство его реализующее обеспечивают достижение поставленного технического результата.
По сравнению с прототипом изобретения имеют следующие преимущества при прочих равных условиях:
1) Предлагаемые изобретения обладают более высокой точностью измерений УОЛ за счет того, что оценивание и учет калибровочных коэффициентов происходит автоматически по результатам измерений в каждой серии продолжительностью до 6 минут (происходит «автокалибровка» прибора). Эти коэффициенты, даже если они изменились, оцениваются заново автоматически в каждой серии измерений в каждой точке, где выполняются измерения.
Погрешность определения составляющих УОЛ способом-прототипом составляет порядка 0,3'' [4]. Погрешность определения УОЛ с помощью нового способа составляет 0,2'' и менее. Это подтверждено испытаниями прибора, проведенными течение 14 наблюдательных ночей в различных географических точках Новгородской, Московской и Калужской областей (Фиг. 4.).
2) Предлагаемые изобретения обладают более высокой производительностью измерений в течение наблюдательной ночи. Это объясняется тем, что исключается отдельная операция определения калибровочных коэффициентов астроизмерителя по звездному небу, которая в способе-прототипе может продолжаться до 30 минут в каждой точке измерений.
Эти коэффициенты являются постоянными только для конкретной точки стояния астроизмерителя. Для проведения измерений в новой точке их необходимо определять заново вследствие их изменений при перемещении в эту точку. Это может быть вызвано влиянием тряски при перевозке между точками, механическими воздействиями при сборке в новой точке и т.д. Они также могут изменяться и во время измерений вследствие влияния изменений температуры, давления, влажности и т.д.
Ключевой особенностью нового способа является «автокалибровка» коэффициентов в каждой серии измерений без выделения специального бюджета времени на калибровку. Время на калибровку в способе-прототипе может достигать 30 минут в каждой точке измерений. При 4-5 измерениях в течение одной осенней ночи потери на калибровку в прототипе достигают 2-2,5 часов. За это время в предлагаемом способе можно выполнить еще дополнительно 2 измерения. Таким образом, вместо 4-5 измерений по способу-прототипу в предлагаемом способе выполняются 6-7 измерений за одну наблюдательную ночь. Это свидетельствует о более высокой производительности измерений в предлагаемом способе.
3) На основе использования нового способа открывается возможность выполнения измерений в полевых условиях на грунтовых основаниях, плоскость которых не изменяется (не «плывет») более чем на 0,1'' за время измерения в единичном положении телескопа продолжительностью 10-12 секунд. Это также повышает производительность измерений, поскольку специально подготовленные площадки для измерений не требуются.
Дело в том, что стабильность горизонтального положения плоскости основания требуется для каждого стационарного измерительного положения телескопа. В способе-прототипе стабильность необходимо обеспечить в течение измерений во всех четырех азимутальных положениях телескопа, для чего требуется от 1 до 2 минут. В предлагаемом способе продолжительность единичного измерения не более 10-12 секунд, что позволяет снизить требования к стабильности основания в 6-10 раз. Требуемая стабильность достигается на обычных сухих грунтовых основаниях. Кроме того, грунтовые основания, в отличие от способа-прототипа, не требуют дополнительного времени на специальную подготовку измерительной площадки.
Предлагаемый способ достаточно универсален: измерения в каждой серии могут выполняться в произвольных направлениях оптической оси телескопа, при произвольных углах в горизонтальной плоскости и отличаться от серии к серии.
Новый способ в единичной серии предполагает проведение не менее 10 независимых измерений, в каждом из которых получается следующий набор данных: кадр звездного неба, показания инклинометра, время экспозиции и температура окружающей среды. Универсальность способа состоит в том, что этот набор независимых измерений можно получить при реализации различных измерительных схем: с использованием поворотного устройства, как показано на фиг. 2, при произвольных направлениях оптической оси телескопа, при произвольных углах в горизонтальной плоскости и т.д. и отличаться от серии к серии. При этом точность итоговых значений УОЛ от точности поворотного и «наклонного» устройства не зависят.
Рассмотрим основные математические соотношения, поясняющие суть изобретений.
Измеряемыми параметрами в каждом положении телескопа при его вращении вокруг оси являются:
1) кадр звездного неба;
2) текущие показания инклинометра по двум перпендикулярным осям ОХ и OY;
3) время экспозиции кадра звездного неба;
4) геодезические координаты;
5) температура окружающей среды.
При этом неизвестными параметрами изобретения являются: 1) Углы взаимной ориентации осей СК инклинометра и сенсора астрономической камеры. При этом используют углы Эйлера ϕ, θ, ψ, которые однозначно определяют поворот одной системы координат относительно другой. Их определяют с использованием известных матриц поворота вокруг осей Ry, Rz:

2. Масштабные коэффициенты mx и my и угол скрещивания осей инклинометра ε. Их вычисляют на основе использования матрицы:

3. Температурные коэффициенты kx и ky осей инклинометра. Их определяют на основе данных об изменении температуры за время измерений в каждой серии. Температурные коэффициенты определяют смещение показаний инклинометра относительно показаний при заданной температуре Т0 (в качестве Т0 можно использовать температуру при первом измерении в каждой единичной серии):

где kx, ky - температурные коэффициенты;  - начальные показания инклинометра без учета смещения из-за температуры; Т0 - температура в первом стационарном положении телескопа; Tend - температура в последнем стационарном положении телескопа;
- начальные показания инклинометра без учета смещения из-за температуры; Т0 - температура в первом стационарном положении телескопа; Tend - температура в последнем стационарном положении телескопа;  - скорректированные показания инклинометра с учетом смещений из-за температуры.
- скорректированные показания инклинометра с учетом смещений из-за температуры.
4. Компоненты nx, ny нормированного вектора силы тяжести n.
Таким образом, вектор неизвестных параметров выглядит следующим образом:
X=(nx, ny, ϕ, θ, ψ, mx, my, ε, kx, ky).
Для вычисления матрицы ориентации А выполняют следующие действия: а) вычисляют матрицу ориентации из СК сенсора астрономической камеры в СК CIRS (Celestial Intermediate Reference System - Небесная промежуточная система координат) путем получения значений направляющих единичных векторов, связанных с плоскостью сенсора астрономической камеры. При этом производятся следующие операции:
- вычисляют вектор ez, который имеет координаты в СК CIRS, полученные прямым пересчетом направляющего вектора, соответствующего опорной точке - центру сенсора астрономической камеры с координатами αц, δц, из сферических координат в декартовые координаты:

- вычисляют вспомогательный вектор  который является направляющим вектором, лежащим в плоскости, перпендикулярной плоскости сенсора астрономической камеры, проходящей через ось ОХ плоскости сенсора астрономической камеры. Для этого находятся координаты α, δ, соответствующие точке сенсора астрономической камеры с координатами (длина сенсора/2, ширина сенсора), и производится пересчет этих α, δ из сферической СК в декартовую СК по формулам (4);
который является направляющим вектором, лежащим в плоскости, перпендикулярной плоскости сенсора астрономической камеры, проходящей через ось ОХ плоскости сенсора астрономической камеры. Для этого находятся координаты α, δ, соответствующие точке сенсора астрономической камеры с координатами (длина сенсора/2, ширина сенсора), и производится пересчет этих α, δ из сферической СК в декартовую СК по формулам (4);
- вычисляют вектор ех:

Вектор ех нормируют на 1;
- вычисляют вектор еу как векторное произведение:

Матрица поворота из СК сенсора астрономической камеры в СК CIRS имеет вид:

б) вычисляют матрицу перехода из СК CIRS в СК ITRS (International Terrestrial Reference System - Международная земная система координат) (обозначим эту матрицу как CIRStoITRS) с учетом времени экспозиции кадра звездного неба, информации о движении полюса и поправок ко времени, полученных из бюллетеней Международной Службы Вращения Земли. Данную матрицу вычисляют на основе использования свободно распространяемой Международным Астрономическим Союзом библиотеки SOFA.
в) вычисляют матрицу поворота из СК ITRS в местную топоцентрическую СК (ITRStoNWU):

где В, L - геодезическая широта и долгота.
г) вычисляют матрицу А поворота из СК сенсора астрономической камеры в местную СК на основе перемножения вычисленных выше трех матриц:

В каждом положении телескопа инклинометр измеряет текущий наклон относительно отвесной линии по двум осям ОХ и OY:  При этом на основании измеряемых параметров моделируют показания инклинометра. Для этого проецируют нормированный вектор силы тяжести п на оси системы координат инклинометра. Сначала умножают п на матрицу ориентации сенсора астрономической камеры А. Это позволяет получить компоненты вектора п в СК сенсора астрономической камеры. Затем умножают на матрицу перехода из СК сенсора астрономической камеры в СК инклинометра R и получают компоненты п в СК инклинометра. Для учета масштабных коэффициентов и угла скрещивания осей инклинометра умножают на матрицу М, а для учета сдвигов, вызванных изменением температуры, прибавляют член k⋅ΔT.
При этом на основании измеряемых параметров моделируют показания инклинометра. Для этого проецируют нормированный вектор силы тяжести п на оси системы координат инклинометра. Сначала умножают п на матрицу ориентации сенсора астрономической камеры А. Это позволяет получить компоненты вектора п в СК сенсора астрономической камеры. Затем умножают на матрицу перехода из СК сенсора астрономической камеры в СК инклинометра R и получают компоненты п в СК инклинометра. Для учета масштабных коэффициентов и угла скрещивания осей инклинометра умножают на матрицу М, а для учета сдвигов, вызванных изменением температуры, прибавляют член k⋅ΔT.
Таким образом, модельные значения показаний инклинометра в местной СК получают проецированием нормированного вектора силы тяжести п на оси СК инклинометра путем поворота, определяемого матрицами R и А, масштабированием матрицей М и добавлением температурной поправки. Исходя из этого, модель нового способа измерений выглядит следующим образом:
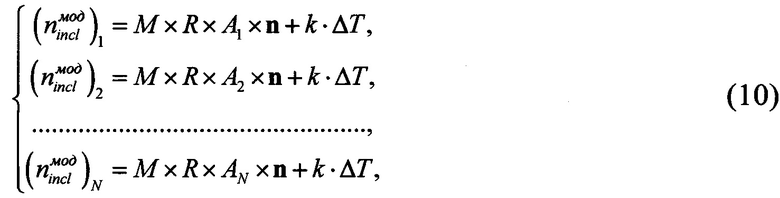
где N - количество измерений (количество стационарных положений телескопа);  - смоделированные измерения инклинометра по осям ОХ и OY; М - матрица для оценки параметров инклинометра (2); R - матрица поворота из СК сенсора астрономической камеры в СК инклинометра (1); А - матрица ориентации сенсора астрономической камеры в местной СК (9); n - нормированный вектор силы тяжести в местной СК;
- смоделированные измерения инклинометра по осям ОХ и OY; М - матрица для оценки параметров инклинометра (2); R - матрица поворота из СК сенсора астрономической камеры в СК инклинометра (1); А - матрица ориентации сенсора астрономической камеры в местной СК (9); n - нормированный вектор силы тяжести в местной СК;  - температурные коэффициенты по осям инклинометра; ΔT - изменение температуры относительно опорного значения.
- температурные коэффициенты по осям инклинометра; ΔT - изменение температуры относительно опорного значения.
Для оценки всех 10 неизвестных параметров модели после обработки данных измерений в единичной серии формируют целевую функцию:

где N - количество измерений (количество стационарных положений телескопа);  - измеренные показания инклинометра по двум осям в i-ом стационарном положении телескопа, пересчитанные в проекции вектора силы тяжести единичной длины (синусы соответствующих углов показаний инклинометра).
- измеренные показания инклинометра по двум осям в i-ом стационарном положении телескопа, пересчитанные в проекции вектора силы тяжести единичной длины (синусы соответствующих углов показаний инклинометра).
Оценка всех 10 неизвестных параметров производят путем минимизации целевой функции (11) (минимизация невязки между модельными и измеренными показаниями инклинометра):

Нелинейную оптимизацию запускают со следующими начальными значениями неизвестных параметров:

Оптимизацию производят методом наименьших квадратов с использованием метода Марквардта-Левенберга с численным вычислением производных. При этом происходит одновременная оценка всех параметров модели, т.е. происходит «автокалибровка» прибора в каждой серии. После оценки nx, ny составляющие УОЛ по широте и по долготе вычисляют по приведенной выше формуле.
Источники информации
1. Шимбирев Б.П. теория фигуры Земли. М., «Недра», 1975, с. 432.
2. Somieski, А. (2008). "Astrogeodetic Geoid and Isostatic Considerations in the North Aegean Sea, Greece." A dissertation submitted to the ETH Zurich for the degree of Doctor of Sciences.
3. Гайворонский С.В., Кузьмина H.B., Цодокова В.В. Автоматизированный зенитный телескоп для решения астрономо-геодезических задач // Навигация по гравитационному полю Земли и ее метрологическое обеспечение. Доклады научно-технической конференции, 14-15 февраля 2017 г., Менделеево. - Менделеево: ФГУП «ВНИИФТРИ», 2017, ил. 185, табл. 41, библ. 297, 362 с., 197-205 с.
4. AlBAYRAK, М.;  DENIZ, R.; TYlER, A. R. В.; AREF, М. М. The use of the automated digital zenith camera system in Istanbul for the determination of astrogeodetic vertical deflection. Bulletin of Geodetic Sciences. 25(4): e2019025, 2019.
DENIZ, R.; TYlER, A. R. В.; AREF, М. М. The use of the automated digital zenith camera system in Istanbul for the determination of astrogeodetic vertical deflection. Bulletin of Geodetic Sciences. 25(4): e2019025, 2019.
5. M.M. Мурзабеков, В.Ф. Фатеев, A.B. Пругло, C.C. Равдин. Метод компенсации погрешности наклона оси телескопа в астроизмерителе уклонения нормали к геоиду. Астрономический журнал, 2018, том 95, №12. DOI: 10.1134/S0004629918120113.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЛЬТИМЕТРИЧЕСКИЙ СПОСОБ ВЫПОЛНЕНИЯ МОРСКОЙ ВЫСОТОМЕТРИИ С ОПРЕДЕЛЕНИЕМ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2727584C1 |
| Система определения уклонений отвесной линии | 2019 |
|
RU2699907C1 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| СПОСОБ СОЗДАНИЯ КОСМИЧЕСКОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ | 2006 |
|
RU2337372C2 |
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| КОСМИЧЕСКИЙ ТЕЛЕСКОП ДЛЯ ОДНОВРЕМЕННОГО НАБЛЮДЕНИЯ ЗЕМЛИ И ЗВЁЗД | 2020 |
|
RU2746041C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА И ШИРОТЫ ПО НЕИЗВЕСТНЫМ ЗВЕЗДАМ | 2012 |
|
RU2497076C1 |
| Способ спутникового геодезического нивелирования определения параметров глобальной модели внешнего гравитационного поля Земли (ВГПЗ) | 2021 |
|
RU2783645C1 |
| ДАТЧИК НОЧНОЙ ОБЛАЧНОСТИ | 2009 |
|
RU2436133C2 |

Изобретение относится к области астрономической геодезии, в частности к области измерений уклонений отвесной линии (УОЛ) с помощью зенитных телескопов. В основу изобретения положена возможность определения составляющих УОЛ по компонентам нормированного вектора силы тяжести. В процессе измерений положений звезд в кадре зенитного телескопа как минимум дважды отклоняют строительную ось его трубы относительно нормали к поверхности геоида на известный угол, а трубу телескопа поворачивают по азимуту вокруг вертикальной строительной оси и фиксируют как минимум в 10 положениях до завершения полного оборота. В процессе измерений происходит автоматическое оценивание и учет калибровочных коэффициентов, определяющих точность измерений («автокалибровка»). Это позволяет учитывать их изменение между сериями измерений и дает возможность исключить операцию их калибровки по звездному небу перед началом измерений в каждой точке. При этом повышается точность и производительность измерений, а также снижаются требования к обеспечению стабильности положения горизонтального грунтового основания, на котором размещается телескоп во время измерений. Это открывает возможность широкого применения изобретений в полевых условиях. 2 н. и 1 з.п. ф-лы, 4 ил.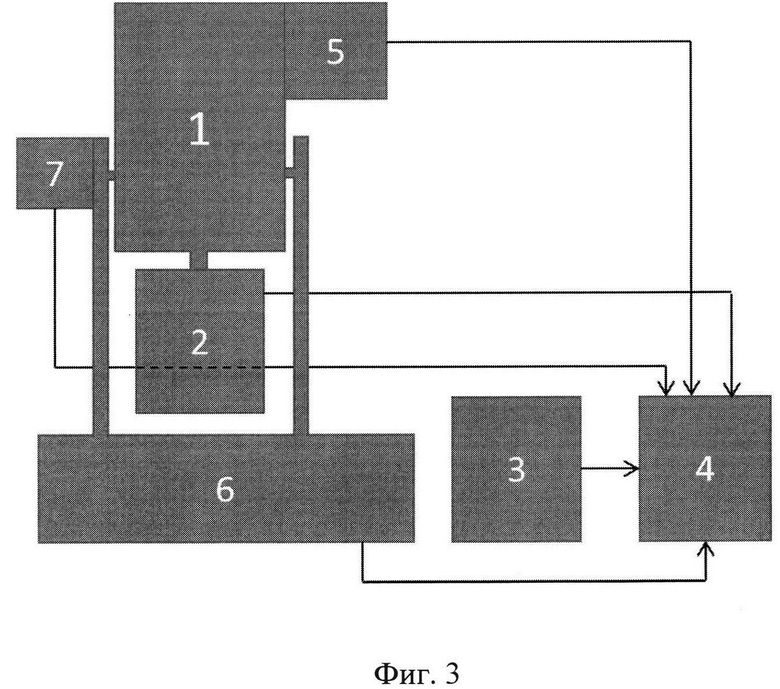
1. Способ определения уклонения отвесной линии, основанный на наблюдениях звездного неба с помощью наземного зенитного телескопа, оснащенного астрономической камерой с матричным фотоприемником, определении его геодезических координат с помощью ГНСС-приемника, измерении углов отклонения телескопа от горизонтальной плоскости с помощью инклинометра, отличающийся тем, что перед первой серией наблюдений предварительно наклоняют строительную ось трубы телескопа относительно оси вращения монтировки на некоторый угол ε1, проводят первый цикл наблюдений звездного неба более чем в пяти стационарных положениях телескопа при вращении его монтировки вокруг вертикальной оси, в каждом положении телескопа первой серии наблюдений фиксируют кадр изображения звездного неба и запоминают все кадры первой серии наблюдений с вспомогательной информацией в отдельном файле 1, наклоняют строительную ось трубы телескопа на другой угол ε2, проводят вторую серию наблюдений звездного неба более чем в пяти стационарных положениях телескопа при вращении его монтировки вокруг вертикальной оси, в каждом положении телескопа второй серии наблюдений снимают кадр изображения звездного неба и запоминают все кадры второй серии наблюдений с вспомогательной информацией в отдельном файле 2; всего проводят N серий наблюдений при N углах наклона строительной оси трубы телескопа и формируют N файлов наблюдений, в каждом кадре всех файлов наблюдений определяют координаты наблюдаемых звезд х, у относительно системы координат кадра изображения, затем выполняют идентификацию звезд кадров изображения с использованием звездного каталога и определяют параметры преобразований между координатами звезд х, у и экваториальными координатами α, δ звезд из каталога, с использованием которых осуществляется преобразование координат центра кадра (центра матричного фотоприемника астрономической камеры) в экваториальные координаты и определяют полную матрицу параметров поворота А из местной системы координат в систему координат матричного фотоприемника астрономической камеры; по результатам обработки всех измерений формируют целевую функцию, зависящую от 10 неизвестных параметров: двух текущих значений компонент nx, ny нормированного вектора силы тяжести, пяти параметров инклинометра масштабных коэффициентов mx и my, угла скрещивания осей ε, температурных коэффициентов осей инклинометра kx и ky и трех углов взаимной ориентации осей систем координат центра матричного фотоприемника и инклинометра ϕ, θ, ψ, по результатам минимизации целевой функции в каждой серии определяют все 10 неизвестных коэффициентов астроизмерителя, по оцененным значениям компонент нормированного вектора силы тяжести вычисляют текущие значения составляющих УОЛ.
2. Способ по п. 1, отличающийся тем, что измерения в каждой серии могут выполняться в произвольных направлениях оптической оси телескопа, при произвольных углах в горизонтальной плоскости и отличаться от серии к серии.
3. Устройство для реализации способа определения уклонения отвесной линии, содержащее зенитный телескоп, астрономическую камеру на основе матричного фотоприемника, соединенную с объективом телескопа, инклинометр, геодезический ГНСС-приемник, устройство для пошагового поворота телескопа в горизонтальной плоскости вокруг его строительной оси, устройство управления и обработки, отличающееся тем, что в его состав дополнительно введено устройство для обеспечения фиксированных наклонов оси телескопа относительно плоскости его пошагового поворота, причем это дополнительное устройство соединено с устройством пошагового поворота телескопа в горизонтальной плоскости и с трубой телескопа, а инклинометр жестко закреплен на трубе телескопа.
| Somieski, А | |||
| "Astrogeodetic Geoid and Isostatic Considerations in the North Aegean Sea, Greece" | |||
| A dissertation submitted to the ETH Zurich for the degree of Doctor of Sciences, (2008) | |||
| Гайворонский С.В., и др., Автоматизированный зенитный телескоп для решения астрономо-геодезических задач // Навигация по гравитационному полю Земли и ее |

