бой и с вторым вьшодом источника постоянного напряжения, а их вторые вьгаоды соединены между собой и с вторым входом первого тригг ера, соединенного выходом с первым входом элемента ИЛИ-НЕ, подключенного вторым входом к выходу второго триггера, а выходом - к управляющему входу второго коммутатора, первые выводы первого и второго фотодиодов подключены ft входу фильтра низ.ких частот, соединенного выходом
через реле с входом формирователя импульсов по заднему фронту и с сигнальными входами второго и третьего коммутаторов, управляющий вход третьего коммутатора соединен с выходом элемента ИЛИ,а его выход через второй усилитель мощности с вторым вьшодом второго электродвигателя , выход первого усилителя мощности .соединен с вторым выводом первого электродвигателя.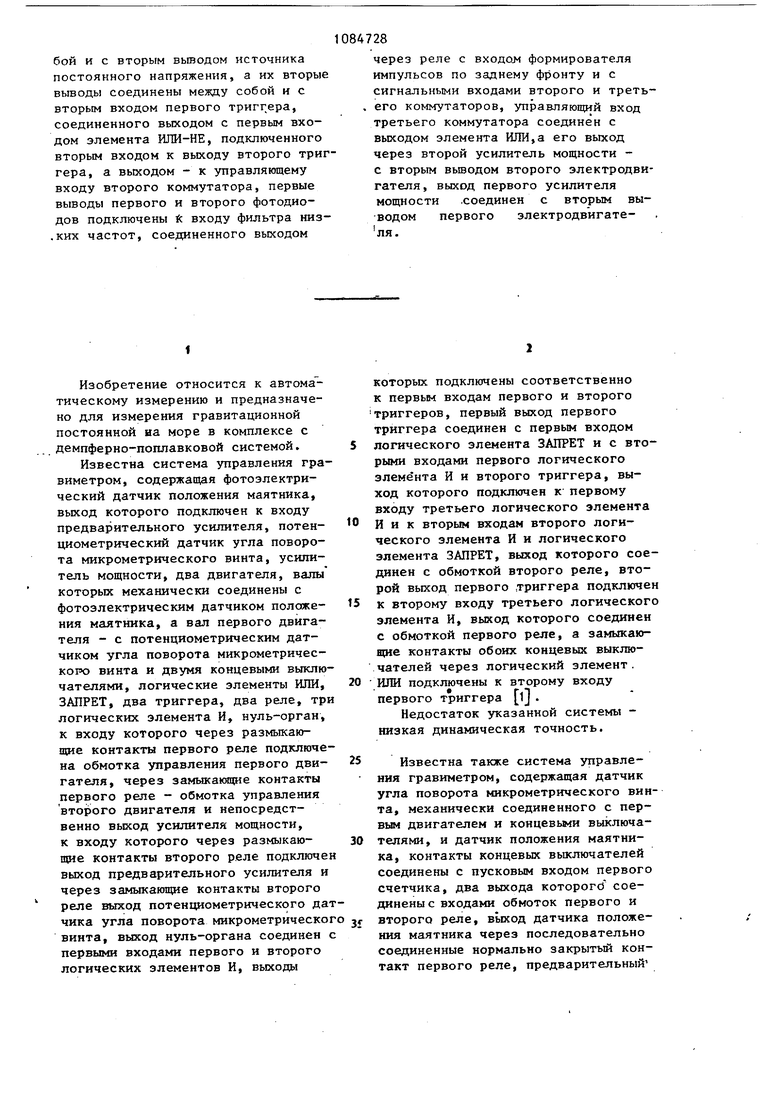


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводами гравиметра | 1977 |
|
SU947819A1 |
| Система для управления и контроля привода гравиметра | 1980 |
|
SU954924A1 |
| Система для управления приводами гравиметра | 1977 |
|
SU1141367A1 |
| Система для управления приводами гравиметра | 1975 |
|
SU658403A1 |
| Устройство для предварительной проверки транзисторов | 1982 |
|
SU1101762A1 |
| Устройство для контроля сопротивления изоляции и уровня напряжения линий электропередачи | 1985 |
|
SU1262415A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Устройство для автоматизированного контроля параметров реле | 1985 |
|
SU1265704A1 |
| Фотореле | 1986 |
|
SU1417072A1 |
| Устройство для поверки электрических и механических секундомеров | 1982 |
|
SU1123018A1 |



СИСТЕМА УПРАВЛЕНИЯ ГРАВИМЕТРОМ, содержащая реле, нуль-орган, первый переменный резистор, первый и второй концевые выключатели, маятниковый чувствительный элемент, оптически связанный с первым и вторым фотодиодами, первые выводы которых соединены между собой, а вторые выводы соединены между собой и с общей шиной системы, первый и второй электродвигатели, первые выводы которых соединены между собой и с общей шиной системы, последовательно соединенные формирователь импульсов по переднему фронту и первый триггер, соединенный выходом с первым входом элемента ИЛИ и управлякшщм входом первого коммутатора, соединенного выходом с выходом второго коммутатора и с входом первого усилителя мощности, и последова тельно соединенные формирователь импульсов по заднему фронту и второй триггер, соединенный выходом с вторым входом элемента ИЛИ, о т л и чающаяся тем, что, с целью повышения ее точности и надежности, в ней дополнительно установлены второй переменный резистор, источник постоянного напряжения, третий коммутатор, фильтр низких частот, элемент ИЛИ-НЕ, второй усилитель мощности, последовательно соединенные первый редуктор, первый преобразователь вращательного движения в поступательное и измерительная пружина, последовательно соединенные второй редуктор, второй преобразователь вращательного движения в поступательное и диапазонная прус жина, выходные валы первого и второго редукторов механически соединеСЛ ны с валами соответственно первого и второго двигателей, а их выходные валы - с подвижньми выводами соответственно первого и второго переменных резисторов, первые неподвижные вьшоды которых соединены между собой и с первым вьшодом источника постоянного напряжения, а их вторые неподвижные вьшоды соединены между собой и с вторым вьлводом источника постоянного напряжения, третий вывод которого соединен с общей щиной системы, подвкжньй контакт первого переменного резистора электрически соединен с входом нуль-органа, соединенного выходом с входом формирователя импульса по переднему фронту и с сигнальным входом первого коммутатора, выход первого преобразователя вращательного движения в поступательное механически соединен с первым и вторым концевыми выключателями, первые выводы которых соединены между со
Изобретение относится к автоматическому измерению и предназначено для измерения гравитационной постоянной на море в комплексе с демпферно-поплавковой системой.5
Известна система управления гравиметром, содержащая фотоэлектрический датчик положения маятника, выход которого подключен к входу предварительного усилителя, потенциометрический датчик угла поворота микрометрического винта, усилитель мощности, два двигателя, валы которых механически соединены с фотоэлектрическим датчиком положе- 5 иия маятника, а вал первого двигателя - с потенциометрическим датчиком угла поворота микрометрического винта и двумя концевыми выключателями, логические элементы ИЛИ, 20 ЗАПРЕТ, два триггера, два реле, три логических элемента И, нуль-орган, к входу которого через размыкающие контакты первого реле подключена обмотка управления первого дни- 25 гателя, через замыкаюпше контакты первого реле - обмотка управления второго двигателя и непосредственно выход усилителя мощности, к входу которого через размыкаю-ЗО
щие контакты второго реле подключен выход предварительного усилителя и через замыкающие контакты второго реле выход потенциометрического датчика угла поворота микрометрического у винта, выход нуль-органа соединен с первыми входами первого и второго логических элементов И, выходы
которых подключены соответственно к первьм входам первого и второго триггеров, первый выход первого триггера соединен с первым входом логического элемента ЗАПРЕТ и с вторыми входами первого логического элемента И и второго триггера, выход которого подключен к первому входу третьего логического элемента Инк вторым входам второго логического элемента И и логического элемента ЗАПРЕТ, выход которого соединен с обмоткой второго реле, второй выход первого триггера подключе к второму входу третьего логическог элемента И, выход которого соединен с обмоткой первого реле, а замыкаюнще контакты обоих концевых выключателей через логический элемент. ИЛИ подключены к второму входу первого триггера lj .
Недостаток указанной системы низкая динамическая точность.
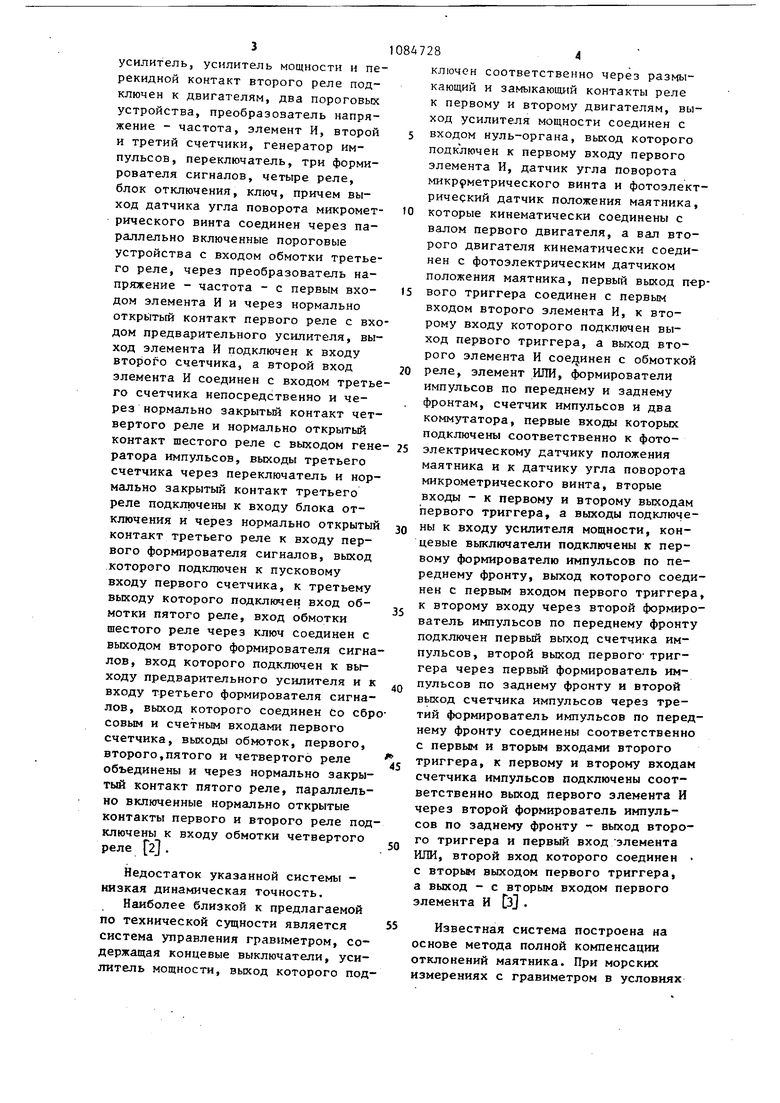
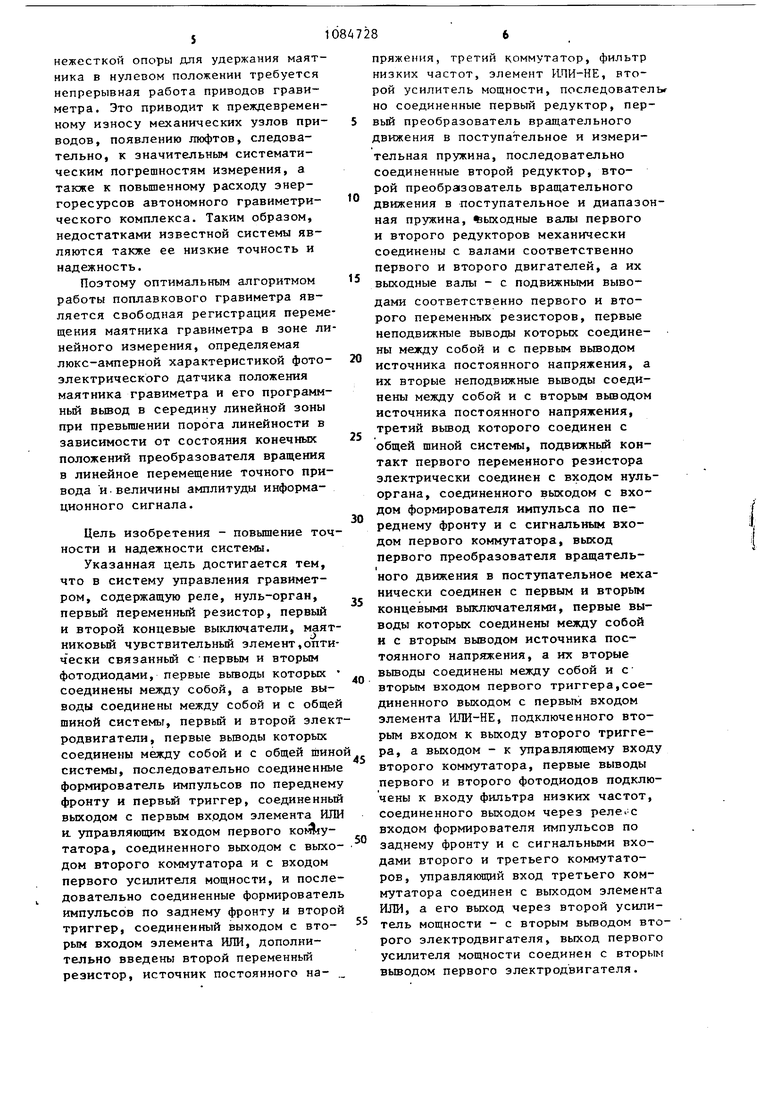
Известна также система управления гравиметром, содержащая датчик угла поворота микрометрического винта, механически соединенного с перВ№1 двигателем и концевьми выключателями, и датчик положения маятника, контакты концевых выключателей соединены с пусковым входом первого счетчика, два выхода которого} соединены с входами обмоток первого и второго реле, вькод датчика положения маятника через последовательно соединенные нормально закрытый контакт первого реле, предварительный 3 усилитель, усилитель мощности и перекидной контакт второго реле подключен к двигателям, два пороговьгх устройства, преобразователь напряжение - частота, элемент И, второй и третий счетчики, генератор импульсов, переключатель, три формирователя сигналов, четыре реле, блок отключения, ключ, причем выход датчика угла поворота микрометрического винта соединен через параллельно включенные пороговые устройства с входом обмотки третьего реле, через преобразователь напряжение - частота - с первым входом элемента И и через нормально открытый контакт первого реле с вхо дом предварительного усилителя, выход элемента И подключен к входу второго счетчика, а второй вход элемента И соединен с входом третье го счетчика непосредственно и через нормально закрытый контакт четвертого реле и нормально открытый контакт шестого реле с выходом гене ратора импульсов, выходы третьего счетчика через переключатель и нормально закрытый контакт третьего реле подключены к входу блока отключения и через нормально открытый контакт третьего реле к входу первого формирователя сигналов, выход которого подключен к пусковому входу первого счетчика, к третьему выходу которого подключен вход обмотки пятого реле, вход обмотки шестого реле через ключ соединен с выходом второго формирователя сигна лов, вход которого подключен к выходу предварительного усилителя и к входу третьего формирователя сигналов, выход которого соединен Со сбр совым и счетным входами первого счетчика, выходы обмоток, первого, второго,пятого и четвертого реле объединены и через нормально закрытый контакт пятого реле, параллельно включенные нормально открытые контакты первого и второго реле под ключены к входу обмотки четвертого реле 2 . Недостаток указанной системы низкая динамическая точность. Наиболее близкой к предлагаемой по технической сущности является система управления гравиметром, содержащая концевые выключатели, усилитель мощности, вькод которого под 8л ключей соответственно через размыкающий и замыкающий контакты реле к первому и второму двигателям, выход усилителя мощности соединен с входом нуль-органа, выход которого подключен к первому входу первого элемента И, датчик угла поворота микрфметрического винта и фотоэлектрический датчик положения маятника, которые кинематически соединены с валом первого двигателя, а вал второго двигателя кинематически соединен с фотоэлектрическим датчиком положения маятника, первый выход первого триггера соединен с первым входом второго элемента И, к второму входу которого подключен выход первого триггера, а выход второго элемента И сое;|инен с обмоткой реле, элемент ИЛИ, формирователи импульсов по переднему и заднему фронтам, счетчик импульсов и два коммутатора, первые входы которых подключены соответственно к фотоэлектрическому датчику положения маятника и к датчику угла поворота микрометрического винта, вторые входы - к первому и второму выходам первого триггера, а выходы подключены к входу усилителя мощности, концевые выключатели подключены к первому формирователю импульсов по переднему фронту, выход которого соединен с первым входом первого триггера, к второму входу через второй формирователь импульсов по переднему фронту подключен первый выход счетчика импульсов, второй выход первого- триггера через первый формирователь импульсов по заднему фронту и второй выход счетчика импульсов через третий формирователь импульсов по переднему фронту соединены соответственно с первым и вторым входами второго триггера, к первому и второму входам счетчика импульсов подключены соответственно выход первого элемента И через второй формирователь импульсов по заднему фронту - выход второго триггера и первый вход элемента ИЛИ, второй вход которого соединен с вторьм выходом первого триггера, а выход - с вторым входом первого элемента И з . Известная система построена на основе метода полной компенсации отклонений маятника. При морских измерениях с гравиметром в условиях нежесткой опоры для удержания маятника в нулевом положении требуется непрерывная работа приводов гравиметра. Это приводит к преждевременному износу механических узлов приводов, появлению люфтов, следовательно, к значительным систематическим погрешностям измерения, а также к повьппенному расходу энергоресурсов автономного гравиметрического комплекса. Таким образом, недостатками известной системы являются также ее низкие точность и надежность. Поэтому оптимальным алгоритмом работы поплавкового гравиметра является свободная регистрация переме щения маятника гравиметра в зоне ли нейного измерения, определяемая люкс-амперной характеристикой фотоэлектрического датчика положения маятника гравиметра и его программный вьгоод в середину линейной зоны при превышении порога линейности в зависимости от состояния конечных положений преобразователя вращения в линейное перемещение точного привода и-величины амплитуды информационного сигнала. Цель изобретения - повышение точ ности и надежности системы. Указанная цель достигается тем, что в систему управления гравиметром, содержащую реле, нуль-орган, первый переменный резистор, первый и второй концевые выключатели, наят никовьй чувствительный злемент,опти чески связанный с первым и вторым фотодиодами, первые вьгооды которых соединены между собой, а вторые выводы соединены между собой и с обще щиной системы, первый и второй элек родвигатели, первые вьшоды которых соединены между собой и с общей шин системы, последовательно соединенны формирователь импульсов по переднем фронту и первьй триггер, соединенны выходом с первым вх.одом элемента ИЛ и. управляющим входом первого ком утатора, соединенного выходом с выхо дом второго коммутатора и с входом первого усилителя мощности, и после довательно соединенные формировател импульсов по заднему фронту и второ триггер, соединенный выходом с вторым входом элемента ИЛИ, дополнительно введены второй переменный резистор, источник постоянного напряжения, третий коммутатор, фильтр низких частот, элемент ИПИ-НЕ, второй усилитель мощности, последователы но соединенные первый редуктор, первый преобразователь вращательного движения в поступательное и измерительная пружина, последовательно соединенные второй редуктор, второй преобразователь вращательного движения в поступательное и диапазонная пружина, выходные валы первого и второго редукторов механически соединены с валами соответственно первого и второго двигателей, а их выходные валы - с подвижными выводами соответственно первого и второго переменных резисторов, первые неподвижные выводы которых соединены между собой и с первым вьшодом источника постоянного напряжения, а их вторые неподвижные вьшоды соединены между собой и с вторым выводом источника постоянного напряжения, третий вьшод которого соединен с общей шиной системы, подвижный контакт первого переменного резистора электрически соединен с входом нульоргана, соединенного выходом с входом формирователя импульса по переднему фронту и с сигнальным входом первого коммутатора, выход первого преобразователя вращательного движения в поступательное механически соединен с первым и вторым концевыми выключателями, первые выводы которых соединены между собой и с вторым выводом источника постоянного напряжения, а их вторые вьшоды соединены между собой и с вторым входом первого триггера,соединенного выходом с первым входом элемента ИЛИ-НЕ, подключенного вторым входом к выходу второго триггера, а выходом - к управляющему входу второго коммутатора, первые выводы первого и второго фотодиодов подключены к входу фильтра низких частот, соединенного выходом через входом формирователя импульсов по заднему фронту и с сигнальными входами второго и третьего коммутаторов, управляющий вход третьего коммутатора соединен с выходом элемента ИЛИ, а его выход через второй усилитель мощности - с вторым вьшодом второго электродвигателя, выход первого усилителя мощности соединен с вторым вьшодом первого электродвигателя. На фиг. 1 приведена структурная схема системы; на фиг. 2 - статическая характеристика реле; на фиг. 3 - статическая характеристика нуль-органа; на фиг. 4 - таблица истинности логики системы. Система содержит маятник 1, пер вый фотодиод 2, фильтр 3 низких ча тот, регистратор 4, реле 5, первый и второй переменные резисторы 6 и первый коммутатор 8, первый усилит 9 мощности, первый двигатель 10, п вый редуктор 11, первый преобразователь 12 вращательного движения в поступательное, измерительная пружина 13, первый концевой выключатель 14, первый и второй триггер 15 и 16, элемент ИЛИ-НЕ 17, нульорган 18, формирователь 19 импульс по переднему фронту, элемент ИЛИ 20, второй усилитель 21 мощности, второй двигатель 22, второй редуктор 23, второй преобразователь 24 вращательного движения в поступательное, диапазонная пружина 25,фо мирователь 26 импульсов по заднему фронту, второй фотодиод 27, общая шина 28 системы, источник 29 посто янного напряжения, второй и третий коммутаторы 30 и 31, маятниковый чувствительный элемент 32, источни 33 света, зеркало 34, гравитометр 35, устройство 36 управления, фото электрический датчик 37 положения, второй концевой выключатель 38 (и - сигнал на выходе i-го блока системы). Система работает следующим образом. Исходное нормальное состояние системы соответствует такому положению маятника 1 маятникового чувствительного элемента 32, при кото ром его вариации перемещения под воздействием изменения приращения силы тяжести не выходят за пределы участка линейности измерения. Линейный участок измерения определяется люкс-амперной характеристикой фотодиодов 2 и 27 фотоэлектрического датчика 37 положения маятника 1 маятникового чувствительног .элемента 32. В режиме линейного измерения информационный сигнал с фотоэлектр Ч6СКОГО датчика 37 положения маятника 1 маятникового чувствительно элемента 32 гравиметра 35 поступае на фильтр 3 нижних частот, частота среза которого равна частоте сигнала внешних возмущений. После фильтрации выходной сигнал фильтра 3 одновременно с регистрацией на третьем канале самопишущего регистратора 4 подается на вход реле 5, имеющего релейную характеристику с тремя устойчивыми состояниями с запаздыванией и находящегося в исходном нулевом положении (фиг. 2). Два других состояния ±и реле 3 имеют место при подаче на вход реле сигнала /Uj / /Uj./, где - порог срабатывания реле 5, которьй соответствует диапазону линейного участка измерения. На первый и второй канал регистратора 4 поступает постоянный сигнал с переменных резисторов 6 и 7, с помощью которых определяют величину перемещения измерительной 13 и диапазонной 25 пружин соответственно. В случае превышения выходным сигналом фильтра 3 предела линейности срабатывает реле 5 и его выходной сигнал ±и соответствующей поляр- ности через открытый второй коммутатор 30 поступает- на вход первого усилителя 9 мощности, нагрузкой которой является первый двигатель 10 точного привода, вращение которого через редуктор 11 и преобразователь 12 вращательного движения в поступательное воздействуют на измерительную пружину 13,стремясь вернуть маятник 1 в положение плоскости горизонта. При движении маятника 1 к плоскости горизонта уменьшается величина амплитуды выходного сигнала фильтра 3 и при достижении его на входе реле 5 и, +Uc,, где UQ - порог отпускания реле 5; последний возвращается в исходное нулевое положение, т.е. система приведена в режим линейного измерения. При значительном перепаде приращения силы тяжести между двумя точками измерения или в случае достижения измерительной пружины 13 своих крайних положений на растяжение или сжатие срабатывает один из концевых выключателей 14 (или 38), механически связанных с первым преобразователем 12 вращательного движения в поступательное, после чего напряжение источника 29 постоянного напряжения через нормально разомкнутый контакт первого концевого вьжлюча9теля 14 поступает на О -входы первого и второго триггеров 15 и 16, переводят их в состояние 1-0. Согласно таблице истинности логики (фиг. А) происходят следующие изменения в сочетании управляющих сигналов коммутаторов 8, 30 и 31, а именно: отсутствие сигнала на выходе элемента ИЛИ-НЕ 17 закрывает второй коммутатор 30; напряжение кода 1 прямого выхода триггера 15 открывает первый коммутатор 8 и сиг нал с первого переменного резистора 6, определякщий положение измерительной пружины 13, одновременно с регистрацией на первом входе регист ратора А поступает через нуль-орган 18 и открытый первый коммутатор 8 на вход первого усилителя мощности 9, и как следствие вращение первого двигателя 10 в направлении вывода первого переменного резистора 6 в точку нулевого потенциала, что соот ветствует середине перемещения изме рительной пружины 13. При переходе через точку нулевого потенциала нуль-орган 18 осуществляет переброс полярности напряжения. При этом формирователи 1.9 импульсов по переднему фронту выдает импульс сброса, поступающий на К-вход первого триггера 15, возвращая последний в исходное положение 0-1. Таким образом, измерительная пружина 13 и переменный резистор 6 выведены в середину своего рабочего положения
Одновременно, напряжение кода IV прямых вькодов триггеров 15 и 16 поступает на вход элемента ИЛИ 20 и его выходное напряжение открывает третий коммутатор 31, пропусИзобретение позволяет повысить динамическую, точность системы примерно в три с половиной раза и повысичь ее надежность примерно двадцать процентов. 8 кая сигнал с реле, 5 на вход второго I усилителя 21 мощности, нагрузкой которого является второй двигатель 22, вращение которого через второй редуктор 23 и второй преобразователь 24 вращательного движения в поступательное воздействует на диапазонную пружину 25, стремясь вернуть маятник 1 в положение плоскости горизонта. При достижении выходным сигналом фильтра 3 значения +Uo реле 5 возвращается в исходное нулевое состояние и перепад напряжения фиксируется формирователем 26 импульсов по заднему фронту с выдачей импульса сброса, поступающего на К-вход второго триггера 16, возвращая его в исходное положение 0-1. Согласно таблице истинности логики (фиг. 4) в случае, если к данному моменту первый триггер 15 находится еще в положении 1-О, т.е. первый переменный резистор 6 не выведен в точку нулевого потенциалу, то третий коммутатор 31 остается открытым, что позволяет в случае превышения порога линейности выходным сигналом фильтра 3, вызванного воздействием измерительной пружины t3 в сторону увеличения амплитуды выходного сигнала фильтра 3, вновь при срабатывании реле 5 вывести маятник 1 в Ьередину линейного участка измерения.
о
Фиъ.З
Фиъ. г
со
е
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
