Изобретение относится к области автоматики, а конкретнее - к автоматизации измерений с гравиметрами, предназначенными для дискретных наблюдений.
Известные системы измерений с гравиметрами требуют участия оператора в процессе измерений, вручную или на расстоянии упр авляющего измерительнь приводом маятника гравиметра или перестраивающего диапазон измерений 1 и 2,
Известна система управления приводами содержащая фотоэлектрически датчик положения маятника, выход которого подключен ко входу предварительного усилителя, потенциометрический датчик угла поворота микрометрического винта, усилитель мощности, два двигателя, валы которых механически соединены с фотоэлектрическим датчиком положения маятника, а вал первого двигателя - с потенциометрическим датчиком угла поворота микрометрического винта и двумя концевыми выключателями 3.
Известные системы имеют недостаточную точность управления приводами гравиметра.
Целью изобретения является повышение точности системы.
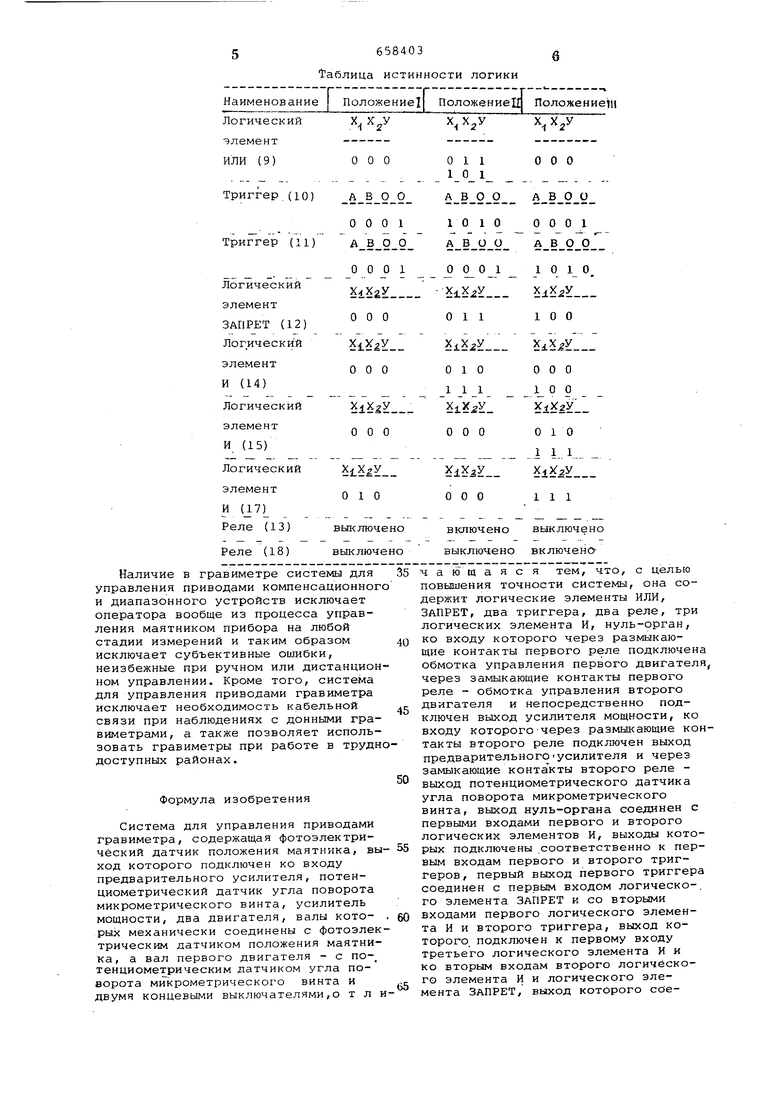
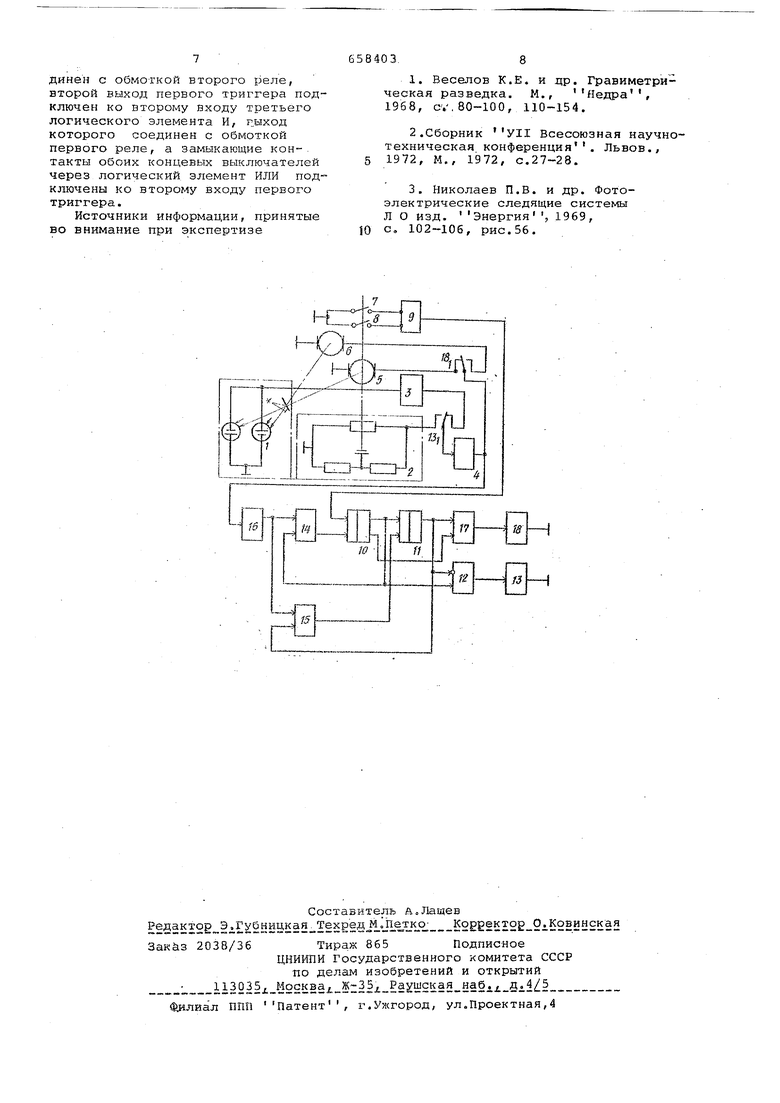
Поставленная цель достигается те что известная система для управления приводами гравиметра дополнительно содержит логические элементы ИЛИ, ЗАПРЕТ, два триггера, два реле три логических элемента И, нуль-орган, ко входу которого через размыкающие контакты первого реле подключена обмотка управления первого двигателя, через замыкающие контакты первого реле - обмотка управления второго двигателя и непосредственно подключен выход усилителя мощности, ко входу которого через размыкающие.контакты второго реле подключен выход предварительного усилителя и через замыкающие контакты второго реле - выход потенциометрического датчика угла поворота микрометрического винта, выход нуль-. органа соединен с первыми, входами первого и второго логических элементов И, выходы которых подключен соответственно к первым входам первого и втЬрого триггеров, 11ервый выход первого триггера соединен с .первым входом логического элемента ЗАПРЕТ и со вторыми входами первого .логического элемента И и второго .триггера, выход.которого подключен -к первому входу третьего логического элемента И и ко вторым в.одам второг логического элемента И и логического элемента ЗАПРЕТ, выход которого соединен с обмоткой второго реле, второ выход первого триггера подключен ко второму входу третьего логического элемента И, выход которого соединен с обмоткой первого реле, а замыкающи контакты обоих концевых выключателей через логический элемент ИЛИ подклю ны ко второму входу первого триггера На чертеже представлена система для управления приводами гравиметра Система включает фотоэлектрический датчик. 1 положения маятника, циометрический датчик 2 угла поворота Микрометрического винта, предварительный усилитель 3, усилитель мощности 4, двигатели 5 и б, установ ленные соответственно на приводах компенсационного и диапазонного устройства. Система содержит концев переключатели 7,8, установленные на приводе компенсационного устройства и включенные на входы логического элемента ИЛИ 9, выход логического элемента ИЛИ подсоединен на второй вход триггера 10, а первый выход триггера 10 соединен со вторым вхо дом триггера 11, с первым входом логического элемента ЗАПРЕТ 12, выход которого соединен с обмоткой реле 13с контактами 13,и со вторым входом логического элемента И 14; первые входы логических элементов И 14и 15 соединены с выходом нуль-орган 16, выходы логических элементов И 14 и 15 включены соответственно на первые входы триггеров 10 и 11, первый выход триггера 11 одновремен но соединен со вторым вкодом логического Элемента И 15, со вторым входом логического элемента ЗАПРЕТ 12 и с первым входом логического элемента И 17, выход которого включен на обмотку реле 18 (с контактами ), второй вход логического элеме та И 17 соединен со вторым выходом триггера 10, Система работает следующим o6paj3OM, За нормальное,исходное положение принимаем такое, когда маятник гравиметра находится не в горизонталь ном (не в нулевом) положении, ко мо жет быть выведен в горизонт приводо компенсационного устройства. В этом случае система работает на привод компенсационного устройства (см.таблицу истинности логики, положение 1) , Сигнал от фотоэлектрического датчика 1 поступает соответственно через контакты реле 13 и 18 (обмотки которых при этом находятся в обесточенном состоянии} к предварительному усилителю 3 и к усилителю мощности 4. От усилителя мощности сигнал поступает на двигатель 5. С целью исключения ложного срабатывания рале 13 и 18 при сбое триггеров 10 и 11 логический элемент И 17 и логический элемент ЗАПРЕТ 12 выдают сигналы срабатывания только при единственном значении таблицы истинности логики, В случае выхода компенсационного устройства из диапазона срабатывает один из концевых переключателей 7,8 и через логический элемент ИЛИ 9 опрокидывает триггер 10 в положение 1-0„ Код 1 с первого выхода триггера 10 поступает на вход логического элемента ЗАПРЕТ 12, вызывая срабатывание реле 13, контакты 13 которого включают потенциометрический датчик 2, на, вход усилителя мощности 4. Одновременно код 1 поступает на вход логического элемента И 14,(см.таблицу истинностилогики, положение 11). После вывода компенсационного устройства в среднее положение нуль-орган 16 выдает сигнал на вход логического элемента И 14, который возвращает триггер 10 в исходное положение 0-1, что приводит к отключению обмотки реле 13, контакты 13 которого при этом вновь подключают предварительный усилитель 3 фотоэлектрического датчика 1 на вход усилителя мощности 4 и вызывает срабатывание триггера 11 в положение 1-0. Код 1 с первого выхода триггера 11 поступает на вход логического элемента И 17, открывая его и вызывая срабатывание реле 18 контакты 18 которого подключают двигатель 6 привода диапазонного устройства на выход усилителя мощности 4, одновременно код 1. поступает на вход логического элемента И 15. После вывода маятника в горизонт приводом диапазонного устройства нуль-орган 16 выдает сигнал на вход логического элемента И 15, который возвращает триггер 11 в положение 1-0, выключая обмотку реле 18, контакты 18 которого подключают двигатель 5 на выход усилителя мощности 4. Таким образом, система оказывается приведенной в нормальное исходное положение. 1аблица истинности логики
658403 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления приводами гравиметра | 1977 |
|
SU1141367A1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| Устройство для управления приводами гравиметра | 1977 |
|
SU947819A1 |
| Система для управления и контроля привода гравиметра | 1980 |
|
SU954924A1 |
| Устройство для приведения в действие трамвайной стрелки с поезда | 2002 |
|
RU2224675C2 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ТРАМВАЙНОЙ СТРЕЛКИ С ПОЕЗДА | 2001 |
|
RU2191715C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПЕРЕВОДА ТРАМВАЙНОЙ СТРЕЛКИ | 2000 |
|
RU2191126C2 |
| Реверсивный позиционный электропривод | 1990 |
|
SU1810975A1 |
управления приводами компенсационно и диапазонного устройств исключает оператора вообще из процесса управления маятником прибора на любой стадии измерений и таким образом исключает субъективные ошибки, неизбежные при ручном или дистанцио ном управлении. Кроме того, система для управления приводами гравиметра исключает необходимость кабельной связи при наблюдениях с донными гра виметрами, а также позволяет использовать гравиметры при работе в труд доступных районах. Формула изобретения Система для управления приводами гравиметра, содержащая фотоэлектрический датчик положения маятника, вы ход которого подключен ко входу предварительного усилителя, потенциометрический датчик угла поворота микрометрического винта, усилитель мощности, два двигателя, валы которых механически соединены с фотоэлек трическим датчиком положения маятника, а вал первого двигателя - с потенциометрическим летчиком угла поворота микрометрического винта и двумя концевыми выключателями,о т л с целью повышения точности системы, она содержит логические элементы ИЛИ, ЗАПРЕТ, два триггера, два реле, три логических элемента И, нуль-орган, ко входу которого через размыкающие контакты первого реле подключена обмотка управления первого двигателя, через замыкающие контакты первого реле - обмотка управления второго двигателя и непосредственно подключен выход усилителя мощности, ко входу которого через размыкающие контакты второго реле подключен выход предварительногоусилителя и через замыкающие контакты второго реле выход потенциометрического датчика угла поворота микрометрического винта, выход нуль-органа соединен с первыми входами первого и второго логических элементов И, выходы которых подключены соответственно к первым входам первого и второго триггеров, первый выход первого триггера соединен с первым входом логическо-. го элемента ЗАПРЕТ и со вторыми входами первого логического элемента И и второго триггера, выход которого, подключен к первому входу третьего логического элемента И и ко вторым входам второго логического элемента И и логического элемента ЗАПРЕТ, выход которого сОединен с обмоткой второго ifJejie, второй выход первого триггера подключен ко второму входу третьего логического элемента И, гыход которого соединен с обмоткой первого реле, а замыкающие кон-, такты обоих концевых выключателей через логический элемент ИЛИ подключены ко второму входу первого триггера.
Источники информации, принятые во внимание при экспертизе
