(54) СИСТЕМА ДЛЯ УПРАВЛЕНИЯ И КОНТРОЛЯ ПРИВОДА ГРАВИМЕТРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| Устройство для управления приводами гравиметра | 1977 |
|
SU947819A1 |
| Система для управления приводами гравиметра | 1977 |
|
SU1141367A1 |
| Система для управления приводами гравиметра | 1975 |
|
SU658403A1 |
| Телеуправляемый кварцевый гравиметр | 1982 |
|
SU1092455A1 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| ДОННЫЙ ГРАВИМЕТР | 1967 |
|
SU201680A1 |
| Устройство для регулирования облучения | 1988 |
|
SU1612275A1 |
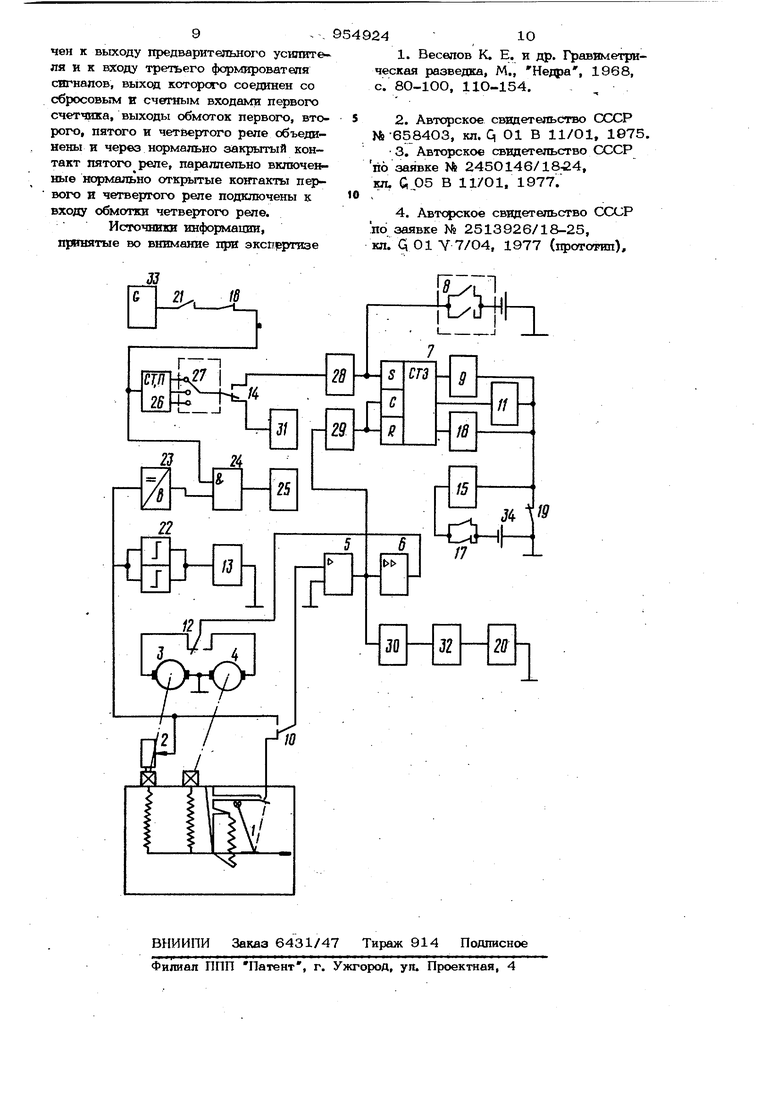
Изобретение относится к автоматизации измерений с гравиметрами, предназначенными для Дискретных набгаодений. Известны rpaamvieTpbi, предназначенны для дискретных наблюдений на суше или на дне меря, которые требуют участие оператора в процессе измерений вручную или на расстоянии управляющего привод ми измерительного и диапазонного устройств гравиметра с последующей визу.альной рещстрашаей резутштатов измерений i л. Недостатком привода гравиметра является визуальная регистрация результатов измерений. Известна система для управления про водами гравиметра, содержащая фотоэлектрический датчик положения маятника, предварительный усилитель, потешщометр ческий датчик угла поворота микрометрического вннта, усилитель мсшшости, два двигателя, валы которых механически соединены с фотоэлектрическим датчиком положения маятника, а вал первого двигателя - с потенпиометрическим датчиком угла поворота микрометрического винта и двумя концевыми выключателями, логические элементы ИЛИ и ЗАПРЕТ, два триггера, два реле, три логических элемента И, цупь-орган. Система работает в соответствии с таблицей иствнноети логики, с автоматической Перестройкой диапазона измерений, совершенно исключает оператора из процесса управления маятником прибора на любой стадии измерений и таким об- . разом исключает субъективные ошибки, неизбежные 1фи ручном шш дистанционном управлении 2 . Рднако логическая схема требу€ т подачи сигналов с нутш-органа, длительность которых должна быть на порядсж меньше времени, необходимого на переключение логических элементов. В противном случае могут появиться ложные дрябатытц ття системы. Кроме того, сИCTOMQ но предусматртшас т спязн п yirpni.iЛО1ШЯ блоком регистрации. Известно устройсЯРхэ для у1фЯЕше1Шя приводакш гравиметра, содержащее коицевып выключат ОЛИ, усилитель мо1цнос;ти, выход которого подключен соответственно через рязмыкающий и зв ыкаюитй контакты реле к первому и второксу двигателям, вход усилителя мохщюсти сое Д1П10Н с входом нуль-органа, выход которого нодключен к первол у входу первого элемента И, второй вход которого соединен с выходом элемента ИЛ1-1, угла поворота микровинта, соединенный с фотоэлектрическим датчиком положения маятника, первый и второй выходы первого триггера соединены соответстве шо с,первыми входа1 щ элемента H/K-i и второго элемента И, к вторым входам которых подключен выход второго триггера, а выход второго элемента И соединен с обмоткой реле. Устройство дополнительно содержит формирователи импульсов по переднему и заднему фронтам, счетчик импульсов и два коммутатора. С помощью этого устройства повьппается быстродействие и надежность . Однако устройство не предусматривает связи и управления блоком регистрации. Наиболее близкой к предлагаемой является система для управления приводами гравиметра, содержащая фотоэлектрически датчик положения маятника, включенный по мостовой схеме, потешшометрическнй датчик угла поворота микрометрического вгагга, два двигателя, первое и второе репе, нуль-орган, предварительный усилитель, усилитель мощности, выход которого через контакты второхх) реле подключен к двигателям, валы которых меха нччески соединены с фотоэлектрическим датчиком гюложения маятника, а вал первого двигателя - с потешшометрическим датчиком угла поворота микровинта и дву мя KOHueBbnvret переключател5тми. Систек а дополнительно содержит тиристорный счетчик со счетным, )тусковым и сбросовым входами и тремя выходами, причем счетный 1зд;од соединен с выходом нульоргана, пусковой вход - с концевыми переключателями, первый выход - с обмоткой первого реле, второй выход - с об моткой вторсго реле, третий выход - с входов Сброс, а выходы фотоэлектркческогх) л потешшометрического датчиков посредг:твом контактов первого реле подклкгнлп-г к 15ХОДУ предварительного усилителя; г.1-гкод которого соединен с вхопамй о 4 :}un.TeJisf мояшости и нуль-органа, что величивает надежиостт работы 4j . . Недостатком этой системы является акже «yrcyrr-i-BHe связи и управления блоом регистрации. Обигнм недостатков. атапогов и прототипа является недостаточно высокая про зводительиость, обусловленная тем, что каждый раз после перестройки диппазона ча данном пункте наблюдеютй в соответствии с тробовалтями методики наблюдений с гравиметрами необходимо повторно 1гооведе1гае наблюдений на предшествующем и затем на данном пункте. Цель Изобретения - обеспечение измеений в автоматическом релог-.-ге и повьппение производительности. Поставлега1ая цель достигается гем, что в систему, содержащую датчик угла поворота микрометрического винта, механически соединенного с первым двигателем и кошхевымЕ выключателями, и датчик положения маятника, контакты концевых выключателей соединены с пусковым входом первого счетчика, ддаа выхода которого соединены с входами обмоток первого и второго реле, выход датчика положения маятника через последовательно соеднногасые нормально закрытый контакт первого реле, предпаритольный усилитель, усилитель мощности и перекидной контакт второго подключен к двнгател5тм, введены два пороговых устройства, преобразователь напряже ше - частота, эле-мент И, второй и третий счетчшш, генератор импульсов, переключатель, три формирователя сигналов, четыре реле, блок отключения, ключ, приче,ч выход датчика угла поворота микрометрического винта соединен через параллель.но включенные пороговые устройства с входом обмотки третьего реле, через преобразователь наттяжеште - чг1стота - с первым входом элемента И и 1ерез но:- мально открытый контакт первого реле - с входом предварительного ускгоггеля, выход элемента И подключен к входу второго счетчика, а второй вход элемента И соединен с входом третьего сче тчика непосре№ственно и через нормально закрытый KOirraKT четвертого реле и нормаш-,но открытый контакт шестого реле - с выходом генератора икшульсов, выходы третьего счетчика чержз переключатель, нормально затдэытый ко5ггакт трет1,его Зреле подключены к входу блока откзпочения и через нормально открытг 1Й контакт третьего реле к входу iiepTicflxj 4)ор- мирователя сигнп юв, рмх(.)д KOTO IOTO подключен к пус;ковому входу первого с-чог-шка, к третьему выходу которого подключен обмотки пятого репе, вход обмотки шестого репе через кточ соединен с выходом второго формироватепя сигналов, вход которого подключен к выходу предварительного усилителя и входу третьего формирователя сигналов, выход которого соедш ен с сбросовым и счетным входами первого счетчика, выходы обмоток первого, второго, пятого ц четвертого реяе объединены и через нормально закрытый контакт пятого реле, параллельно включенные нормально открытые когггакты первого и четвертого репе подключены к входу обмотки четвертого репе. Количество единичных измерений гравиметром, находящимся на дне моря, определяется- конкретными условиями пяблюдений. Включенный на выход предварительного усилителя второй формирователь сигналов контролирует допустимую амплитуду колебаний маятника около нулевого положения. Включенные на выход потенциометрического датчика пороговые устройства отслеживают диапазон измере ний и при достижении, заданного (верхнего или нижнего) порогового уровня вклю чают реле, подготавливающее цепь к перестройке диапазона, которая произойдет по завершении измерений с последующим повторением хщкпа на этом же пункте. На чертеже изображена сисггема для утфавления и контроля привода гравиметра. Система содержит фотоэлектрический датчик 1 положения маятника, например фоторезистор, включенный по мостовой схеме с источником света, потешшометреЕ1чес.кий датчик 2 угла поворота микрометрического вшгга, например многообоpoi-ный потенциометр, первый двигатель 3, второй двигатель 4, предварительный усилитель 5, усилитель мощности 6, первый счетчик 7, концевые выюпочатевш 8, первое репе 9 с контактами 10, второе репе 11 с контактами 12, третье репе 13 с контактами 14, четвертое реле 15 с контактами 16 и 17, пятое реле 18 с контактами 19, шестое рсяе 2О с ков тактамн 21, пороговые устройства 22, преобразователь 23 напряжение - частота, элемент И 24, второй счетчик 25, третий счетчик 26, переключатель 27, формирователи 28-30 сигналов, блок 31 отключения, ключ 32, генератор 33 импульсов, КОНТР кт 34 первого репе. Система работает следующии образом. В ИСХОД1ЮМ положении измерительное устройство находится в рабочем диапазоне, ко шевые выключатели 8 разомкнуты и пороговые устройства 22 пе достигли уровней срабатывания, реле 9, 11, 18 и 15 обесточены. Сигнал рассогттасования с фотоэлектрического датчика 1 чд)ез нормально закрытые контакты 1О, реле 9 поступает на предварительный усипитвпь 5, затем на усилитель 6 мсящгости и через нормально закрытые контакты 12, реле 11 на двигатель 3. Двигатель через измерительный привод вьтодит маятшпс в нулевое положение и система продолжает работать в режиме непрерывного слежешЕя, что приводит к срабаггываншо форьягроватепя 30 сигналов, включению транз1 сторного ключа 32, реле 20 и замыканию нормально открытых контактов 21 в выходной цепи генератора 33 импульсов. В то же время информационный сигнал с потенциометрического датчика 2 поступает на вход преобразователя 23 глпря;кение - частота, с выхода которого в виде соответствующей, частоты подается через элемент И 24 на пятиразрядный счетчик 25. Тактирование элемента И 24 производится генератором 33, при этом количество измерений определяется счетчиком 26. По оконча- . НИИ регистоашш необходимого количества измерений со счетчика 26 через переключатель 27 и нор ально закрытые контакты 14 реле 13 поступает положитель.ны и импульс в блок 31 отключения системы. Если в процессе измерений амплитуда колебаний маятника превысит допустимую величину, ффмирователь 30 выключит ключ 32 и реле20 через контакты 21 отключит генератор 33 импутпзсов от элемергга И 24, тто приведет к прекращению регистрации. При достижении сигналом с потенциометрического датчика 2 верхнего или нижнего порогового уровня происходит срабатывание соответствующего порогового устройства и включение репе 13, нормально открытые контакты 14 которого подключают через переключатель 27 выход счетчика 26 на вход формирователя 28, в прсоеосе изм фений находящегося в ждущем режиме. По окончании регкстртош сигнал со счетчика 26 включает через формиюватель 28 тиристорный счетчик 7, с первого выхода которого поступает питание на реле 9, что вызывает переключение контактов 10 с фотоэлектрического датика 1 на потенгшометрический датчик 2 Jt вютючетзде контактов 17 в цели реле .:, которое блоюфуется ко1ггактами 17 и выключает цепь генератора 33 импульсов контактами 16, что приводит к прекрйцезппо регистрации измерений im врекет перестройки диапазона. В это время caiTHon рассотасования поступает с датЧ гка 2 черео предвар11тепт- }оый усилитель 5 и усилител, МОЩНОСТИ Q на ДБ11гател1 3 из ерительного привода, вьтодяпщй датчик 2 в середтгу диолазона измерений. В момент достижения этого положе1ПГЯ с выхода усилителя 5 на вход формирователя 29 поступает сИ1нал в виде меандры, что приводит к его срабатыванию и переключенто счетчика 7 по счетному входу. Это нызьтает включеше реле 11 и выключение реле 9, при этом происходит переключение кош-актов 12 на двигатетвэ 4 диапазонно1х привода. возвращение ко1ггактов Ю с подключением фотоэлектрического датчика 1 и выключезше контактов 34 в цепи обмот-ки реле 15. Начинается процесс вывода маятгагка в нулевое положение двигателем 4 через диапазонный привод с управ пешгем от фотоэлектрического датчика 1. Пр выводе маятника в нулевое положени сигнал в виде меандры с выхода усилителя 5 поступает на вход формирователя 29, что приводит к его срабатыванию и переключе1тю счетчика 7 по сбросовому входу. В этом случае включается реле 18, размыкая и замыкаянормально закрытые контакты 19с кратковременной задержкой, что привод1тт к обесточиванию счетчика 7, реле 9, 11, 18 и 15и возвращешпо системы в исходное положение При больших градиентах ускорений силы тяжести возможен прямой выход измерительного устройства из диапазона с переходом порогового уровня и срабатыванием соответствующего концевого выключателя 8 При этом через соответствующий концевой выключатель поступает положительный потенциал на пусковой чВХОД счетчика .7 и начинается процесс перестройки диапазона по вьпыеописанному алгоритму,, начиная с момента срабатывания формирователя 28. Расчетная ожвдаемая экономическая эффективность от внедрения системы управления приводами гравтяметра и регист рации при работах как в области шельфа так и на дне глубокого моря за шестимесячный морской период работ с.одним экз€ мт1Ля- Х)М автоматического морского гравиметра соеганит около 30 тыс. руб. Внедрение предлагаемой системы полностью исключает оператора из процесса управле1П1я приводакга гравиметра njipoцесса измерений, повьппает точность и производительность измерений. Формула и 3 о бретения Система для управлениями контроля привода гравиметра, содержащая датчик угла поворота микрометрического винта, механически соединенного с первым двигателем и концевыми выключателями, и датчик положения маятника, контакты концевых выключателей соединены с пусковым входом первого счетчика, два выхода которого соединены с входами обмоток первого и второго реле, выход датчика положения маятшпса через последовательно соединенные нормально закрытый контакт первого реле, предварительный усилитель, усилитель мощности и перекидной контакт второго рел-е подключен к двигателям, отличающаяся тем-, что, с целью ловьпиения точности системы, в нее введены два пороговых устройства, преобразователь напряжениечастота, элемент И, второй и третий счетчики, генератор импульсов, переключатель, три формирователя сигналов, четыре реле, блок отключения, ключ, причем выход датчика угла поворота микрометрического винта соединен через параллельно включенные пороговые устройства с входом обмотки третьего реле, через преобразователь напряжение - частота - с первым входом элемента И и через нормально открытый контакт первого репе - с входом предварительного усилителя, выход элемента И подключен к входу второго счетчика, а второй вход элемента И соединен с входом третьего счетчика непосредственно и через нормально закрытый контакт четвертого реле и нормально открытый контакт щестого реле - с выходом Генератора импульсов, выходы третьего счетчика через переключатель, нормально закрытый контакт третьего реле подключены к входу .блока отключения и через нормально открытый контакт третьего реле к входу первого формирователя сигналов, выход KOTOpoixi подключен к пусковому входу первого счетчика, к третьему выходу которого подколочен вход обмотки пятого реле, вход обмотки шестого рэле через ключ соединен с выходом второго формирователя сигналов, вход которого подключен к выходу предварительного усилителя и к входу третьего формирователя сигналов, выход которого соединен со сбросовым и счетным входами первого счетчика, выходы обмоток первого, второго, пятого и четвертого реле объединены и через нормально закрытый контакт пятого реле, параллельно включенные нормально открытые контакты первого и четвертого реле подключены к входу обмоткн четвертого реле. Источники информации, пр1таятые во внимание при экспертизе 2410 1. Веселов К. Е. и др. Гравиметрическая разведка, М., Недра, 1968, с. 80-100, 11О-154. 2. Авторское свидетельство СССР №658403, кл. Q 01 В 11/01, 1075. 3. Авторское свидетельство СССР lib заявке I 2450146/18 24, кл, G.P5 В 1 I/O 1. 1977. 4. Авторское свидетельство СССР по заявке № 2513926/18-25, кл. aolY7/04, 1977 (прсуготип).
