Изобретение относится к электротехнике и может быть использовано при создании электромагнитных мамин ударного действия для разру11ения 1орных пород, забивания свай, возбуждения сейсмоколебаний в верхних слоях земной коры.
Известен электромагнитный привод молота, содержащий электромагни с обмотками первого и обратного хода, внутри которых расположен якорь и индивидуальные датчики, а устройство управления содержит коммутирующий конденсатор и подключенные к обмоткам тиристоры, управляющие электроды которых соединены с индук тивными датчиками С13.
Триггерная схема питания силовых катуыек не позволяет осуществит регулировку длительности силового импульса тока в катуижах, а следовательно, регулировку энергии и частоты ударов.
Наиболее близким к изобретению по технической сущности и достигаемому результату является электроманитный привод, включакиций в себя электромагнитный двигатель с обмотками прямого и обратного хода, внутри которых расположен якорь, имеющи проточку, и двумя индукционными датчиками, и устройство управления, содержащееR-5-триггер, входы которого соединены с датчиками, а выход чере: формирователи и цепи задержки являющиеся задатчиками частоты, связан с R-входами двух других триггеров, а через другие формирователи с 5-входами тех же триггеров, выход которых через усилители могцности связаны о обмотками прямого и обратного хода t2 .
Управление усилителями мощности через задержки, которые выдают сигнлы через определенные промежутки времени, приводит к неустойчивости режима работы молота, выходу из синхронизма при изменении параметров рабочего процесса {сил сопротивления, температуры катушек, угла наклона молота, величины отскока бойка), что снижает стабильность управления молотом.Расположение датчико§ относительно силовых катушек ограничивает максимальную частоту и минимальную эйергию ударов, т.е. ограничивает диапазон регулирования частоты, а следовательно, энергии ударов..
Цель изобретения - повыьзение надежности за счет улучшения стабильности управления и повышение производительности за счет расширения диапазона регулирования частоты.
Поставленная цель достигается тем, что в электромагнитном приводе, содержащем электромагнитный двигатель возвратно-поступательного движения, содержащий обмотки прямого и обратного хода, имеющий проточку ферромагнитный .якорь, расположенный внутри обмоток, и устройство управления, содержащее задат5 чик частоты движения якоря,RS -триггер и усилители мощности, подключенные к обмоткам, проточка на якоре имеет переменную глубину вдоль образующей, устройство управления
10 снабжено двумя компараторами напряжения, тремя элементами НЕ, двумя элементами И и источником опорного напряжения, выход которого соединен с инвертирующим входом вого компаратора, к инвертирующему входу второго компаратора подключен задатчик частоты, к неинвертирующим входам обоих компараторов подключен датчик, выход первого комQ паратора подключен к первому входу Первого элемента И и через элемент НЕ - KR-входу триггера, а выход второго компаратора подключен к З-входу триггера и через элемент НЕjc к первому входу второго элемента И и к второму входу первого элемента И, к третьему входу которого подключен выход триггера, а выход первоге элемента И соединен с входом первого усилителя мощности
и через элемент НЕ - с вторым входом второго элемента И, выход которого подключен к входу второго усилителя мощности.
На фиг,1-4 показаны различные
5 положения якоря относительно датчика в двухобмоточном Электромагнитном двигателе возвратно-поступательного движения на фиг.5 - функциональная схема привода.
0 Электромагнитный привод содержит силовые обмотки прямого 1 и обратного 2 хода, установленные на направляющей 3, внутри которой расположен ферромагнитный якорь 4, на
5 боковой поверхности которого вьшолнена профилированная проточка, состоящая из конической проточки 5, переходящей в цилиндрическую про- точку 6. Задатчик частоты ударов 7
связан с инвертирующим входом компаратора 8, неинв.ертирующий вход которого вместе с неинвертирующим входом компаратора 9 подключен к датчику положения якоря .11, а инвертирующий вход связан с источни ком опорного напряжения 10. Выход компаратора 8 связан с входом элемента 12 НЕ и с R-входом триггера 13, а вьоход компаратора 9 - с входом элемента НЕ 14 и с первым входом
0 элемента И 15. Выход элемента 12 связан с первым входом элемента И 16 и с вторым входом элемента И 15, а выход элемента НЕ 14 - с S-входом триггера 13,.выход которого свя5 эан с третьим входом элемента 15.
Выходы элементов 15 и 16 связаны с усилителями мощности 17 соответственно, катуиек прямого 1 и обратного 2 хода. Выход элемента 15 через элемент 18 связан с. вторым входом элемента 16.
Задатчик 7 включает в себя источник 19 опорного напряжения и под ключенный к нему потенциометр 20, с помощью которого можно изменять величину напряжения, снимаемого с задатчика 7 в пределах от минимального значения (несколько большего опорного напряжения источника 10) до максимального (несколько меньшего максимального сигнала датчика 11). Датчик 11 трансформаторноiго типа имеет разомкнутый магнитопровод, который замыкается якорем 4 При этом образуется воздушный зазор между магнитопроводом датчика 11 и якорем 4, величина которого изменяется при движении якоря от максимального значения, соответствующего исходному состоянию якоря 4, т.е. замыканию магнитопровода датчика 11, той частью боковой поверхности якоря 4, которая имеет цилиндрическую проточку 6 (фиг.1), до минимального, соответствующего замыкания магнитопровода датчика 11 той частью боковой поверхности якоря 4, которая не имеет профилированной проточки (фиг.З и 4). Соответственно изменяется и величина выходного сигнала датчика 11 от минимального до максимального значения, т.е. с уменьшением величины упомянутого воздушного зазора сигнал датчика-11 увеличивается и наоборот. Следует отметить, что сигнал датчика 11 при любом значении воздушного зазора всегда имеет положительное значение, а минимальное его значение всегда несколько меньше величины опорного напряжения источника 10. Якорь 4 в конце прямого (рабочего) хода наносит удар по инструменту 21, находяшемуся .в направляющей 3 . .
Привод работает следующим обра зом.
В начале цикла якорь 4 находится в левом (нижнем при вертикальном расположении машины) крайнем положении (фиг.1). магнитопровод датчика- 11 замыкается той частью якоря 4, которая имеет цилиндрическую прогочку 6. В этом случае сигнал датчика 11 несколько меньше опорного напряжения источника 10. Поэтому на выходе компаратора 9, а значит и на первом вхо-. да элемента 15, появляется сигнал О, который, инзертируясь в элементе 14, поступает наR -вход триггера 13 и переводит его в состояни О. Сигнал на выходе элемента 15, инвертируясь в элементе 18, поступает на второй вход элемента 16. В это время сигнал датчика 11 меньше напряжения, подаваемого с задатчика 7 на инвертирующий вход компаратора 8. Поэтому на вьтходе последнего появляется сигнал
который ,инвертируясь в элементе 12, поступает через открытый элемент 16 на усилитель мощности 17 и включает катушку 2 обратного хода. Якорь 4
0 начинает втягиваться этой катушкой. С этого момента магнитопровод датчика 11 начинает замыкаться той частью якоря 4, которая-имеет коническую проточку 5. Это приводит к умень5шению воздушного зазора между магнитапроводом датчика 11 и якорем 4 и к увеличению сигнала, снимаемого с датчика 11. Величина сигнала датчика 11, увеличиваясь по мере
0 перемещения якоря 4, в начале превышает опорное напряжение источника 10, что приводит к появлению на выходе компаратора 9, а значит и на первом входе элемента 15,
5 сигнала 1,который|Инвертируясь в элементе 14, снимает cR-входа триггера 13 сигнал , а затем превышает и напряжение задатчика 7 (фиг.2), После этого на выходе ком0паратора 8 и на S-входе триггера 13 появляется сигнал 1 .Последний переход в состояние 1,что влечет за собой появление сигнала 1 на третьем входе элемента 15. Од5новременно, снимаются сигналы с.первого входа элемента 16, с второго входа элемента 15, и катумка 2 обратного хода выключается, а якорь 4 продолжает движение вверх по инер0ции до полной остановки в крайнем верхнем положении (фиг.4). После этого под действием собственного в.еса якорь 4 начинает движение вниз, совершая-прямой (рабочий) ход, при этом сигнал датчика 11, уменычаясь,
5 становится меньше напряжапия задатчика 7.Начиная с этого момента, на Бькоде компаратора 8 появляется сигнал О, который, инвертируясь в элементе 12, поступает через откры0тый элемент 15 на усилитель мощности 17 и включает катуьчку 1 прямого- хода. Якорь 4 начинает втягиваться этой катушкой. Происходит дальшейшее уменьшение сигнала датчика 11.
5 Наконец, в момент нанесения удара якорем 4 по инструменту 21 в конце прямого хода (фиг.1) магнитопровод датчика 11 снова замыкается той частью якоря 4, которая -5меет цилинд0рическую проточку 6. Сигнал датчика 11 снова становится несколько - меньше опорного напряжения источника 10 и описанные процессы повторяются. Для изменения энергии и часто5 ты ударов достаточно потенциомет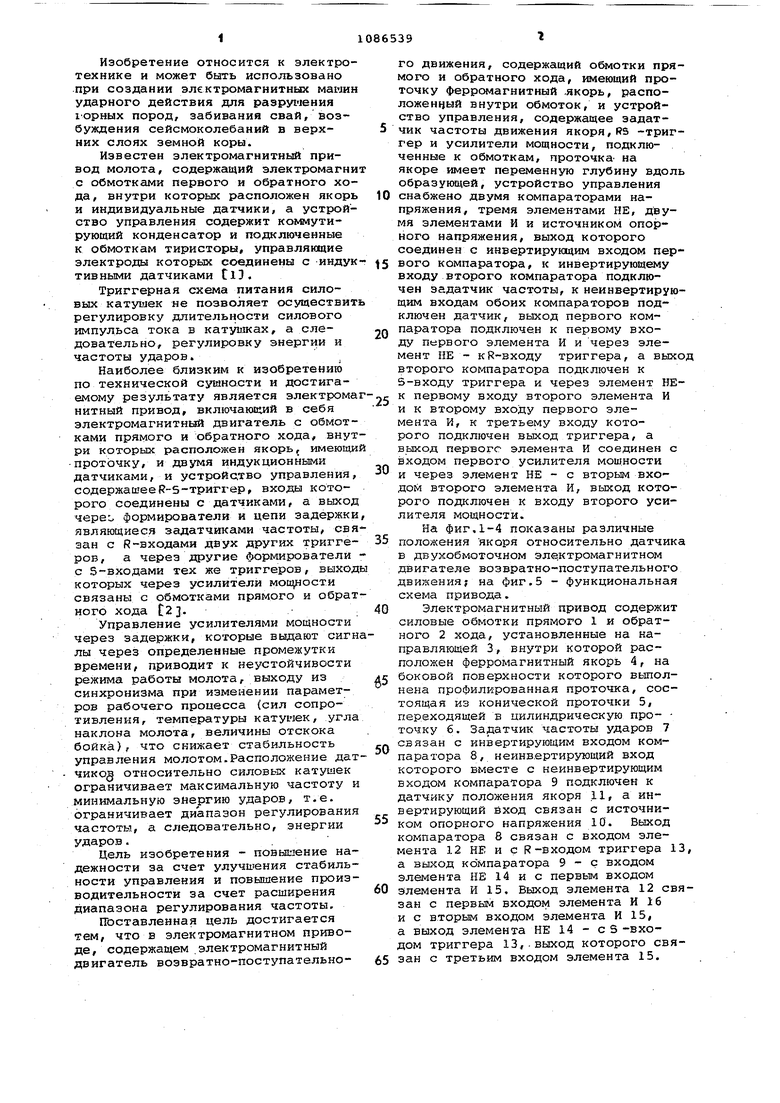

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод возвратно-поступательного движения | 1984 |
|
SU1169130A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Устройство для управления электромагнитом | 1988 |
|
SU1511772A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Электромагнитный привод ударного действия | 1987 |
|
SU1495947A1 |
| Электромагнит с форсировкой | 1988 |
|
SU1607022A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1989 |
|
SU1731018A1 |
| Устройство для контроля работы электромагнита | 1988 |
|
SU1522160A1 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| Устройство для контроля электромагнита | 1982 |
|
SU1111135A1 |
ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД, содержащий электромагнитный двигатель возвратно-поступательного движения, содержащий обмотки прямого н обратного хода, имеющий про точку ферромагнитный якорь, расположенный внутри обмоток, и устройство управления, содержащее эадатч частоты движения якоря, RS -триггер и усилители мощности, подключенные к обмоткам, отличающийс тем, что, с целью повшчения надежности за счет улучшения стабильнос ти управления и повы1ения производительности за счет расширения диапазона регулирования частоты, проточка на якоре имеет переменную глубину вдоль образующей, устройство управления снабжено двумя компараторами напряжения, тремя элементами НЕ, двумя элементами И и источниХом опорного напряжения, выход которого соединен с инвертирующим входом первого компаратора, к инвертирующему входу второго компаратора подключен задатчик частоты, к неинвертируюцим входам обоих компараторов подключен датчик, выход первого компаратора подключен к первому входу первого элемента И и через элемент НЕ к R-входу триггера, а выход второго компаратора подключен к 5-входу триггера и через элемент НЕ - к первому входу второго элемента И и к второму входу первого элемента И, к третьему входу которого подключен выход триггера, а выход первого элемента И соединен с входом первого усилителя мощности и через элемент RE - с вторым входсм второго элемента И, выход которого подключен к входу второго усилителя мощности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромагнитный молот | 1970 |
|
SU497405A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Малов А.Т | |||
| и др | |||
| Электромагнитные молоты, Новосибирск, Нау, 1979, с.176-181. | |||
