f . ; / / V/ / /
со ел
СО 4 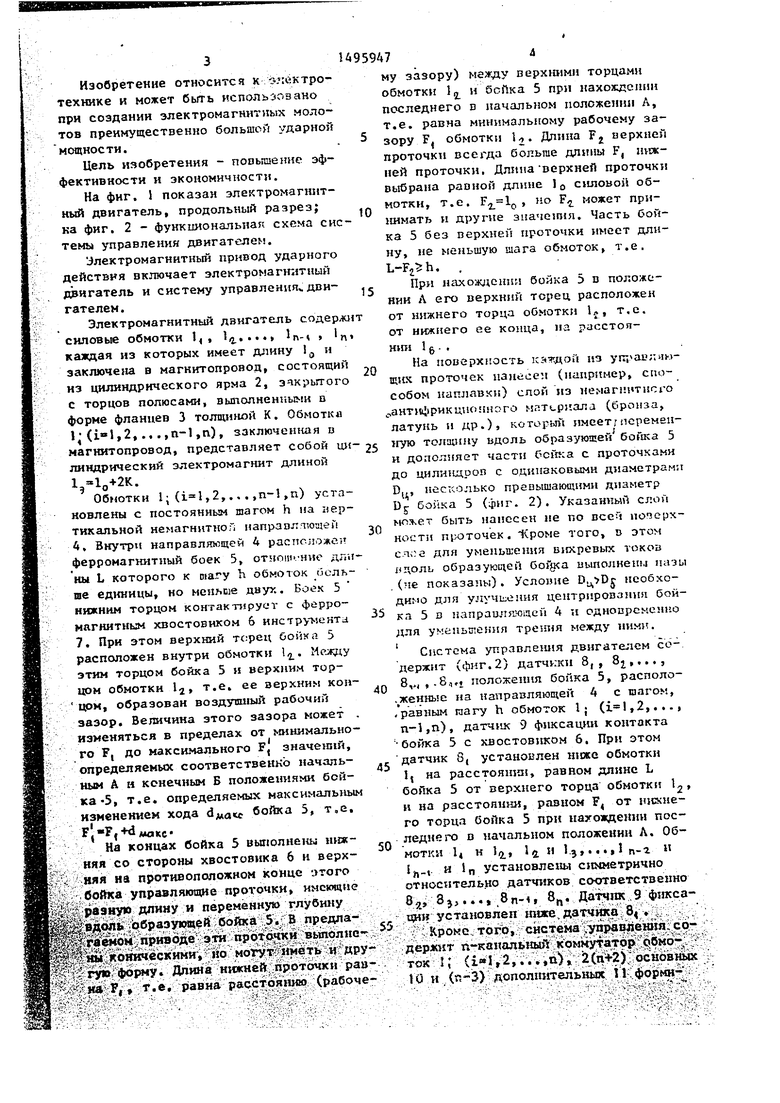



| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Электромагнитный привод ударного действия | 1988 |
|
SU1624653A1 |
| Электромагнитный привод | 1983 |
|
SU1086539A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1982 |
|
SU1053256A1 |
| Электромагнитный привод возвратно-поступательного движения | 1984 |
|
SU1169130A1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Устройство для измерения прочности бетона | 1990 |
|
SU1807392A1 |

Изобретение относится к электротехнике и может быть использовано при создании электромагнитных молотов преимущественно большой мощности. Цель - повышение эффективности и экономичности привода. Он содержит обмотки 11-1N, каждая из которых заключена в цилиндрический магнитопровод.Внутри обмоток размещен боек 5, который нижним торцом контактирует с ферромагнитным хвостовиком 6 инструмента. На концах бойка 5 выполнены нижняя и верхняя конические проточки, которые вместе со схемой управления позволяют осуществить более точное управление подачей импульсов тока в обмотки и, тем самым, повысить точность и плавность регулирования энергии удара. 2 ил.
« 41..,.л-4л-/
fV9.r
Изобретение относится к --- гектро- технике и может быть использовано при создании электромагнитных молотов преимущественно большой ударной мощности.
Цель изобретения - повышение эффективности и экономичности.
На фиг. J показан электромагнитный двигатель, продольный разрез; ка фиг. 2 - функииональнак схема системы управления двигателем.
Электромагнитный привод ударного действия включает электромагнитный двигатель и систему управления., двигателем.
ЭлектромагнитиьиЧ двигатель содерж
п
СИПОВЬе обмотки 1, 1,..., Ift- , 1
каждая из которых имеет длину 1 и заключена в магнктопровод, состоящий из 1дилиидрнческого ярма 2, закрытого с торцов полюсами, вьтолненными о форме фланцев 3 толпи1иой К. Обмотка 1 ( ,2, ., . ,п-1 ,п) , ззключен1шя в
При HiVxoay;cHUM бойка 3 а положении Л его верхний торец расположен от нижнего торца обмотки 1, т.е. от нижнего ее конца, на расстоянии 1 6 .
На поверхг.ость из ущ асляю- щих проточек na)iece:i (например, способом наплавки) спой из иемап итнсго -,ант 11|рикц ю ого маТ(,риапа (бронза, латунь и др.), которьт имеет,мюремеп20
магнитопровод, представляет собой ци- 25 толаушу вдоль образующей бойка 5
лнндрический электромагнит длиной 1,-V2K.
Обмотки 1;(,2,.,.,п-1,п) установлены с постоянным шагом h на лер- тикальной немагнитной направляющей 4. Внутри направлямщей 4 pacnr. ферромагнитный боек 5, отяот -ние длины L которого к шагу h обмоток больше единицы, но менлие двух. Боек 5 нижним торцом контактирует с ферромагнитным хвостовиком 6 инструмента 7. При этом верхний терец бойка 5 расположен внутри обмотки 1. MPJKJW этим торцом бойка 5 и верхним торцом обмотки Ij, т.е. ее верхним кон- нрк, образован воздушный рабочий зазор. Величина этого зазора может изменяться в пределах от минимального Fj до максимального F, значегаШ, определяемых соответствеинЬ начальным А и конечным Б положениями бойка -5, т.е. определяемых максимальным изиенекиеи хода бойк 5, т,е,
F Fj+dMaKC
На концах бойка 5 выполнены нижняя со стороны хвостовика 6 и верхняя на противonопожном конце зтого бойка управляющие проточки, имскчдие
Система управле1шя двигател держит (фиг.2) датчики 8,, 8j, 8,,,.8.,,« положения бойка 5, ра женнь е на направляющей 4 с га равным шагу h обмоток Ij (i, n-1,n), датчик 9 фиксации конт бойка 5 с хвостовиком 6. При э датчик QI установлен ниже обмо Ij на paccTOHHiai, равном длине боГша 5 от верхнего торца обмо и на расстояцни, равном F, от го торца бойка 5 при нахождени леднего в начальном положении моткя 1, и l., l/i и ).)..«tlnlj,,. и r, установлены симметри относительно датчиков со ггветс 8.J, Sj,..., 8п-ь 8,. Датчик 9
разную дпнну и переменную глубину
1вдап1« .образующей бойка 5. В предла-цнв установлен intxe. датчика 8
Jra WiOji приводе эти проточки вьтолно- кояическими, по могут itwetb ГУ, форму. Дпина нижней проточки равна F., т.е. равна расстоянию (рабочеКромс, того, снстема ,упраоле держит п-ка«алькый коммутатор ток 1J (,2,..,,ii), 2 (п+2) о 10 и (п-3) дополнительных И ф
ит
10
U959474
му зазору) между верхш1мн торцами обмотки Ij и бсЛка 5 при нахождении последнего в начальном положении А, т.е. равна минимальному рабочему за- 5 зору F, обмотки Ц Длина F верхней проточки всегда больше длины F, нижней проточки. Длина верхней проточки выбрана paBHof длине Q силовой обмотки, т.е. р2.о ° г может принимать и другие aiiaueimn. Часть бойка 5 без верхней проточки имеет длину, не меньшую шага обмоток, т.е. L-Fj5h. .
При HiVxoay;cHUM бойка 3 а положении Л его верхний торец расположен от нижнего торца обмотки 1, т.е. от нижнего ее конца, на расстоянии 1 6 .
На поверхг.ость из ущ асляю- щих проточек na)iece:i (например, способом наплавки) спой из иемап итнсго -,ант 11|рикц ю ого маТ(,риапа (бронза, латунь и др.), которьт имеет,мюремеп15
20
и дополняет части бойка с проточками до цилиндроп с одинаковыми диаметрам: Вц, несколько превышающими диаметр Dg- 6oi iKa
0
0
5 (фиг. 2). Указанный слой быть нанесен не по всей почсрх- ности проточек. Кроме того, о этом слог для уменьшения вихревых токов вдоль образующей боГ{ка выполнены пазы .(не показаны). Условие D. необходимо для улуч1;:оиия цвнтрирования бой- 5 кп 5 в напраштпкяцей 4 и однопрсменпо для уменьшения трения между HUMVt.
Система управле1шя двигателем содержит (фиг.2) датчики 8,, 8j,..., 8,,,.8.,,« положения бойка 5, располо- женнь е на направляющей 4 с гаагом, равным шагу h обмоток Ij (i,2,..., n-1,n), датчик 9 фиксации контакта бойка 5 с хвостовиком 6. При этом датчик QI установлен ниже обмотки Ij на paccTOHHiai, равном длине L боГша 5 от верхнего торца обмотки l и на расстояцни, равном F, от шскне- го торца бойка 5 при нахождении последнего в начальном положении Л. 06- моткя 1, и l., l/i и ).)..«tlni lj,,. и r, установлены симметрично относительно датчиков со ггветственно 8.J, Sj,..., 8п-ь 8,. Датчик 9 ф1жса5
0
цнв установлен intxe. датчика 8
цнв установлен intxe. датчика 8
Кромс, того, снстема ,упраоления. содержит п-ка«алькый коммутатор обмо- ток 1J (,2,..,,ii), 2 (п+2) основных 10 и (п-3) дополнительных И форьт5 U959A7
рователей коротких импульсов, п эле- .
ментов НЕ 12, 2(п-1) двухвходовых элементов И 13, (п+2) первис 14 (п+1) вторых I5 и (п-3) допол1штель- ных 16 компараторов напряжения и источник опорного напряжения UQ.
Каждый канал коммутатора подключен к питахяцему выпрямителю и„, и содерНекнвертирующие входы всех компараторов 14, кроме компаратора 14-дат чика 8 4, связаны с реэистора ш 18 и 19, а неинвертирующий вход компара тора 14 датчика 8 - с подвижным кон тактом потенциометра 20.
Нешшертирующие входы компараторо 15 датчиков 8j, 8},..., 8.2, 81,.,
жит последовательно соединенный с об- д связаны сподз1Ш1 ым контактом потеи4
, 1 .i
У ifc
моткой 1, (,2,,. .п) силовой ключ 17, ( ,2,., .,п) с входам отпирания и запирания.
Источник опорного напряжения подключен к электр1тческой цепи, состоящей из последовательного соединения первого 18, второго 19 резисторов н параллельно соединенных между собой первого 20, второго 21 я третьего 22 потенциометров и образующей вместе с ним эадатчик энергии ударов. Каждый из входов отпирания ключей 17 и 17 связан с выходом одного элемента И 13, а каждый из входов отпирания ключей t7, П,..., Мп- 17 связан с выходами двух элементов И 13. Кроме того, вход отпирания ключа 17 через формирователь 10 связан с датчиком 9 фиксации.
Датчик 8, подключен, к инвертирующему входу своего компаратора 14. Каждый из датчиков 8i, 8ц, 8 , 8,2 подключен к инвертирующим входам своих компараторов 14 и 15, а кааадый из датчиков 8,..., - к инаертирующим входам компараторов 14 и 15 и дополнительного компаратора 16.
Выходы всех компараторов 1А через формирователи )0 связаны с входами запирания всех ключей 17; ( ,2, } ...,п). Кроме того, каждый из --ппсо- дов компараторов 14 датчиков Б,..., 8 через элемент .НЕ 12 связан с первыми входами двух элементов И I3 кличей, 17 и H i, 17з и П,..., 17п-г и 7п., , 17п, и 17„ соответственно, а каждый из выходов компараторов 14 датчиков 8 и 8, через элемент НЕ 12 - с первыми входами , элементов И }3 ключей 17 и 17,.
Выходы компараторов 15 датчиков 85,,8з...,8п.1,8 пи через формирователи 10 связаны с вторыми входами элементов И 13 ключей 17, 174,..., 17„„ , 7п соответственно, а выходы компараторов 15 датчиков 8п и 8 П4«:через формирователи 20 связаны : с вторыми входами других элементов И ) 3 соотвегственяо I,t, и 57 юоочей.
циометра 21. Неиняертирующие входы компараторов 15 датчиков 8, 8
пи
и
8п4.г также неинвертирующие входы всех дополнительных компараторов 16
{5 связаны с подв11Ж {ым контактом потенциометра 22.
Выходы компараторов 16 датчиков соответственно 8 и 8 через формиро ватели 11 связаны с вторыми входами
20 элементов И 13.ключей 16 и 17, а выходы компараторов 16 датчиков 8, Sg.. .., 8 п., соответстве1шо через формирователи 11 - с вторыми входами других элементов И 13 ключей
25 18, 17„,...,7п., соответственно.
Датчики 8, ,8,.. .,8ц«;2 чдентичны и представляют собой датчики трансфо маторного типа с разомкнутым магни30 топроводом, каждый из которых вьадает сигнал у Qпри иахо:1Пвнии бойка 5 вне зоны этого датчика, j - при замьаса НИИ его магнитопролода как нижним, так и верхним кондом бойка 5, U ,с при замыкании его магаитопровода частью бойка 5, не имеющей проточек, ц и - при замыкании его магнитопровода нижней и верхней конической частью этого бойка. При этом
40 т.е. величина сигнала 0 каждого из упомянутых датчиков зависит от величины воздушного зазора между магнитопроводом датчика и конической часть бойка 5 и изменяется при движении
45 бойка в указанных пределах. Длнтелькость сигнала U(равна времени замы- кания магнитопровода датчика 8i (i . 1,2,,..,п+1,п+2) частью бойка 5 без проточек.
50
Кроме того, при замыкании магни
топровода каждого из датчиков 8, . (,3,.. .«п,) частью бойка 5
как имеющей проточку,::так и ие инеп- 55 щей ее, на выходе соответствующего
элемента НЕ 7 появляется, сигнал 1, Длительность этого сигнала
рааиа времени прохожд ния1 войхв 5 -
ч.
в зоне датчика,,M .v .1
- - / .
Некнвертирующие входы всех компараторов 14, кроме компаратора 14-датчика 8 4, связаны с реэистора ш 18 и 19, а неинвертирующий вход компаратора 14 датчика 8 - с подвижным контактом потенциометра 20.
Нешшертирующие входы компараторов 15 датчиков 8j, 8},..., 8.2, 81,.,
циометра 21. Неиняертирующие входы компараторов 15 датчиков 8, 8
пи
и
8п4.г также неинвертирующие входы всех дополнительных компараторов 16
{5 связаны с подв11Ж {ым контактом потенциометра 22.
Выходы компараторов 16 датчиков соответственно 8 и 8 через формирователи 11 связаны с вторыми входами
20 элементов И 13.ключей 16 и 17, а выходы компараторов 16 датчиков 8, Sg.. .., 8 п., соответстве1шо через формирователи 11 - с вторыми входами других элементов И 13 ключей
25 18, 17„,...,7п., соответственно.
Датчики 8, ,8,.. .,8ц«;2 чдентичны и представляют собой датчики трансформаторного типа с разомкнутым магни30 топроводом, каждый из которых вьадает сигнал у Qпри иахо:1Пвнии бойка 5 вне зоны этого датчика, j - при замьаса- НИИ его магнитопролода как нижним, так и верхним кондом бойка 5, U ,с при замыкании его магаитопровода частью бойка 5, не имеющей проточек, ц и - при замыкании его магнитопровода нижней и верхней конической частью этого бойка. При этом
40 т.е. величина сигнала 0 каждого из упомянутых датчиков зависит от величины воздушного зазора между магнитопроводом датчика и конической часть бойка 5 и изменяется при движении
45 бойка в указанных пределах. Длнтель кость сигнала U(равна времени замы- кания магнитопровода датчика 8i (i . 1,2,,..,п+1,п+2) частью бойка 5 без проточек.
50
Кроме того, при замыкании магни
топровода каждого из датчиков 8, . (,3,.. .«п,) частью бойка 5
как имеющей проточку,::так и ие инеп- 55 щей ее, на выходе соответствующего
элемента НЕ 7 появляется, сигнал 1, Длительность этого сигнала
рааиа времени прохожд ния1 войхв 5 -
ч.
в зоне датчика,,M .v .1
- - / .
Сигналы идо, Uj),,, ид всегда
имеют положительные значения, причем -
:
с помощью потенциометров 20-22 можно изменять величину напряжений 26 27 подаваемых соответственно на неинвертирующий вход компаратора 14 датчика 8,, на неинвер- тирующие входы компараторов 15 датчиков 82,, 8з,.,., 8п-г 8.1 и на неинвертирующие входы остальных компараторов 15 и 16 в пределах от UQ до Ufl, и тем самым, производить по- зиционное (т.е, по положению бойка) управление включением и отключегшем обмоток.
Привод работает следующим образом Например, в исходном состоятш устройства боек 5 занимает начальное положение А (фиг. 2). Находясь в это положении, боек 5 замьхает магнито- проводы датчиков 8, 8 и 9. После замыкания выключателем 23 цепи пита- НИИ и датчика 9 сигнал, снимаемый с этого датчика через связанный с ним формирователь 10, поступает на вход отпярания ключа 1l н отпирает
его. По обмотке начинает протекать 30 F и достигает конца этой сГ моткн.
ток и боек 5 начинает втягиваться этой обмоткой.
С этого момента магнитопровсд датчика 8. начинает замыкаться ч«с- тью бойка 5, имеющей нилэпоо проточку. По мер втягивания бойка 5 ригнзл U, датчика 8 начинает уменьшаться и при определенном положеюти переднего торца бойка 5 внутри рабочего зазора обмотки 2, становится меньше напряжения . Это приводит к появлеиню на выходе компаратора 14, связанного с этим датчиком, сигнала I, который после формирователя 10 в виде
35
40
3 этот момент происходит размыкание магиитоаровода датчика 8 и уменьшс- 1ше его сигнала от , до . Это приводит к псяплению на выходе компаратора 14, св 7занного с этим датчиком, сигнала 1, которьпЧ после формирователя 10 в виде короткого импульса поступает на входы запирани ключей 17; (,2,.,..п-1,п). Ключ 17J запирается и обмотка 1 отключается, а Соек 5 продолжает двигаться .по инерции.
Двигаясь по инерции, боек 5 верхней кoиичe - :oй проточкой замыкает короткого импульса поступает на вхо- . магкитспронс, датчика 8 и описанные ды запирания ключей 17 (,2,.,,, процессы повто;.-ются. п-:1,п). Ключ 17 запирается и обмот-Продолжая свис движение вверх,
ка IQI отключается. При этом оставиая- ся энергия магнитного поля обмотки Г рассеивается о разрядной цепи, подключенной параллельно этой обмотке, а боек 5 продолжает двигаться вверх по инерции iразрядные испи не показаны).
Двигаясь по инерции, Воек 5 верхней конической проточкой замыкает
50
55
..магш1тЪпровод; атчика-8,, при этом
вУ(Гсигн я увеличивается от U до
иЛ что влечет Ъа собой появ-псние
как под действием электромагнитных сил, действукжц1х последовательно со стороны остившихся обмоток, так н по инерции в промежутках отсутствия наз в: нньпс сил, боек 5 достигает своего крайнего верхнего положения и останавливается, заканч1Ш а я обратный (холостой) .ход. Затем под действием силы тяжести боек 3 начинает до исешш обратную сторону,.совершая прямой (рабочий) ход и с опр&деле гного ио- моггга времсш боек 5 начинает замы,
5
IA959478
, на выходе компаратора 14, связанного с этим датчиком сигнала О, гсаторый, инвертирупсь 8 элементе НЕ Я 2, поступает на первые входы элементоп 13 и
Ь
ключей М и 17э, а затем боек 5 начинает замыкать нагнитопровод датчика 8j споей частью, имеющей нижнюю коническую проточку. В это время боек 5 внедряется в обмотку Ц на глубину не меньшую, чем Cg (фнг. 2), а, начинал с глубины внедрения , сигнал Uj датчика 8.. начинает уменьшаться и при определенном положении пег- реднего по ходу движения торца бойка 5 внутри рабочего зазора о:5мотки Ij становится меньше напряжения Ujg,3то приводит к появлешт на выходе, компаратора 15, связанного с датчиком iiiii
сигнала
., . , который, пройдя через свой формирователь 10 и открытый элемеит Н 13, в виде короткого им- пульса поступает на вход отпирании ключа ITj. Послёд1;ий отпирается, по обмотке и боек обмоткоГ.
По мере втяпшання боек 5 проходит оставшуюся часть рабочего за .юра
5 начинает протекать ток 5 втягиваться этой
5
0
3 этот момент происходит размыкание магиитоаровода датчика 8 и уменьшс- 1ше его сигнала от , до . Это приводит к псяплению на выходе компаратора 14, св 7занного с этим датчиком, сигнала 1, которьпЧ после формирователя 10 в виде короткого импульса поступает на входы запирания ключей 17; (,2,.,..п-1,п). Ключ 17J запирается и обмотка 1 отключается, а Соек 5 продолжает двигаться .по инерции.
Двигаясь по инерции, боек 5 верхней кoиичe - :oй проточкой замыкает . магкитспронс, датчика 8 и описанные процессы повто;.-ются. Продолжая свис движение вверх,
0
5
как под действием электромагнитных сил, действукжц1х последовательно со стороны остившихся обмоток, так н по инерции в промежутках отсутствия наз- в: нньпс сил, боек 5 достигает своего крайнего верхнего положения и останавливается, заканч1Ш а я обратный (холостой) .ход. Затем под действием силы тяжести боек 3 начинает до исешш обратную сторону,.совершая прямой (рабочий) ход и с опр&деле гного ио- моггга времсш боек 5 начинает замы9Й95947
кать магвитолровод датчика 3,, своей частью, имеющей oepxiooio (заднюю по ходу движения) коническую проточку (положеш1е бойка 5 обЬзначено через В, фиг. 2). Начиная с этого момента, сигнал датчика 8v,.i уменьшается и при определенном положении переднего (по ходу движения) торца бойка 5 внутри рабочего зазора обмотки 1„ становится меньше напряжения о приводит к появлению на выходе компаратора 15, связанного с датчиком сигнала , который, пройдя через свой формиро- патель 10 и открытый второй элемент И 13, в короткого импульса поступает на вход отпирания ляюча 17),. Иоследни отпирается, по обмотке 1,
Для изме:1еи 5п моментов отклгочелил цбмотки 1 при холостом ходе бойка 5 включения осталь а.(х обмоток при холостом ходе бойка 5 и включения всех
обмоток 1; (,2,,..,п-1,п) при рабочем ходе этого бойка достаточно изменять напряжения U 26 i7 соответственно.
Выполнение н предлагаемом приводе управляющих проточек переменной глубины, его снабжение упомянутыми дополнительиьпчи функциональными элементами, а также выполнение иных
5 связей как между дополнительными функциональными э..омеитами, так и функциональными элементами, имевпги- мися в приподе, позволяет осуществить более точное (позиционное) уп10
точность и плавность регулирования энергии удара при одновременном рас- 25 ширении диапазона {зменения энерпг, удара практически от нуля и до максимального значения-.
Формула
3 обретения
30
начинает протекать ток и боек 5 начи- 2Q равлеиие подачеГ 1 мпульсов тока в иает втягюзаться этой обмоткой.обмотки внутри рабочего зазора кажПо мере втягивания боек 5 проходит до из ни:, и, те.м самым, повысить оставшуюся часть рабочего зазора F п достигает конца этой обмотки. В момент происходит размыкание магиитопровода датчика 8 г vt-ieHb- шение erj сигнала от , до Uj, . Это приводит к появле}оио на выходе .чомпаратора 14, связанного с этим .илт шком, сигнала , которыГ- после (формирователя IG ; вгле короткого имиульсц поступает на входы запирания ключей 17 (,2,,,.,п-1,п). Ключ 17 запирается и обмотка 1,, отключается, а боек 5 продолжает двигаться вниз по инйрции и под действием силы тяжести.
Двигаясь вниз, боек 5 нижней частью, имеющей котгческую проточку, замыкает магнитопровод датчика В и описанные процессы повторяются с той лишь разницей, что ключи I7j (i n-I,n-2,...,2,). отпираются через другие (вторые) элементы И 13, которые пе использовались при холостом ходе бойка 5, а сигналы на отпирание оставиихся обмоток 1, (, п-4, . ..,2,1), С шмаемые с датчиков 8,,, , 8 jj.j,.,, ,8;. ,8, соответственно, фор35
40
Злектрохагиит лый иринод ударного дейстыиг., ик.ьючаюций электромагнитны двигатель, солер:«;аа11й п силовых обмо ток устаноплониых с постоя1П1Ым шагом иа немагнитной напразляюссй, внутри которой расположен ферромагни ный боек, отношение длниы которого к шагу обмоток больше единицы, но меньше двух и упирающийся торцом в хвостовик рабочего тела, при этом
ч другой его торец расположен внутри второй cHii jy обмотки, боек на концах выполнен с управляюгднми проточками, причем верхняя проточка выполнена д5 длиной больше нижней, и систему управления двигателем, содержащую () датчиков положения бойка, рас- полож.оняых на направляющей с шагом, равпьпч шагу обмоток, датчик фикса- Utm контакта с хвостовиком рабочего тела, при этом первый датчик положения уста1;оэлсн ниже нижней обмотки, коммутатор с п каналами, каждый из которых подключен к питающему выпрямителю и содержит последователь но соединенный с оСмоткой;силовой 1слюч с входами отпирания и запирания а также 2 (п+2) формирователей йм пул ьсоз, п элементов НЕ, 2 (п-1) двух
мируются соответствующими дополнитель--р. компараторами 16 и формирователями 11 .
Продолжая свое движение, боек 5 п конце рабочего хода наносит удар по хвостовику 6 инструмента 7, про- с нзиодя при этом,полезную работу, слова замыкает ндгнитопровод датчика 9 фикс;ации и описа шый цикл работы уст- ройства повторяется. .
д5
Для изме:1еи 5п моментов отклгочелил цбмотки 1 при холостом ходе бойка 5, включения осталь а.(х обмоток при холостом ходе бойка 5 и включения всех
обмоток 1; (,2,,..,п-1,п) при рабочем ходе этого бойка достаточно изменять напряжения U 26 i7 соответственно.
Выполнение н предлагаемом приводе управляющих проточек переменной глубины, его снабжение упомянутыми дополнительиьпчи функциональными элементами, а также выполнение иных
связей как между дополнительными функциональными э..омеитами, так и функциональными элементами, имевпги- мися в приподе, позволяет осуществить более точное (позиционное) уп
точность и плавность регулирования энергии удара при одновременном рас- ширении диапазона {зменения энерпг, удара практически от нуля и до максимального значения-.
до из ни:, и, те.м самым, повысить
Формула
3 обретения
до из ни:, и, те.м самым, повысить
до из ни:, и, те.м самым, повысить
5
0
р.
с
Злектрохагиит лый иринод ударного дейстыиг., ик.ьючаюций электромагнитный двигатель, солер:«;аа11й п силовых обмоток устаноплониых с постоя1П1Ым шагом иа немагнитной напразляюссй, внутри которой расположен ферромагнитный боек, отношение длниы которого к шагу обмоток больше единицы, но меньше двух и упирающийся торцом в хвостовик рабочего тела, при этом
ч другой его торец расположен внутри второй cHii jy обмотки, боек на концах выполнен с управляюгднми проточками, причем верхняя проточка выполнена 5 длиной больше нижней, и систему управления двигателем, содержащую () датчиков положения бойка, рас- полож.оняых на направляющей с шагом, равпьпч шагу обмоток, датчик фикса- Utm контакта с хвостовиком рабочего тела, при этом первый датчик положения уста1;оэлсн ниже нижней обмотки, коммутатор с п каналами, каждый из которых подключен к питающему выпрямителю и содержит последовательно соединенный с оСмоткой;силовой 1слюч с входами отпирания и запирания, а также 2 (п+2) формирователей йм пул ьсоз, п элементов НЕ, 2 (п-1) двух
И1495947
аходовьпс элементов И, п+2 перимх и п+1 вторых компараторов напряжения и источник опорного напрянсения, каждый из входов отпирания 1-го и 2-го, ключей связан с выходом одного элемента И, кроме того, вход отпнраш1л 2-го ключа через формирователь импульсов связан с датчиком фиксации контакта бойка с хвостовиком рабочего
10
т
тела, а каждый из нходон отпирания остальных ключей связан с выходами двух элементов И, первый датчик.
положения иод;с1аочен к инвертирующему входу 1-го компаратора, а каждый из 5 остальных датчиков положения подключен к инвертирующим входам 1-го и 2-го компараторов, выходы всех первых компараторов через формирователи импульсов связаны с ВХОД1МИ запира1шя 20 всех ключей, а выходы первых компараторов 3-го.., датчиков элемент RE связаны с первыми входами дв/х элементов И соответсгвенио 2-го и 3-го, .,,,(n-l)-ro, п-го ключей, выходы первых компараторов Я-го и (п+1)-го датчиков через элементы НЕ связаны, с первыми входами элементов И соответственно 1-го и п-го кпсочей, выходы вторых компараторов 2-гс, . , ., (п.-1)-го датчиков через формиро а о- ли импульсов связаны с ыторымл ми элементов И соотв тсгие1шо З -го,
,..,П-ГО ключей, выходы ВТОРЬ Х КОМ-параторов .ь-го, (п+1)-го, (п+2)-:-о датчиков через формирователи импульсов связаны с вторь ми входами других элементов И соответственно (п-2)-го, (п-1)-го7 п-го ключей, отличающийся тем, что, с целью повы- иення эффективности и экономичности, система управления снабжена (п-З)-ми допслнит(:льными компараторами напряжения (1-3)мя дополнительными формирователями импульсов и электрической цепью, состоящей из последо- . бойка.
вательно го резис ных перв тенциоме источник этом неи В.1х комп тора 1-г вым и пт 3,...,(п инвертир тельного сход 1-г подключе потенцио вторых K датчиков тактом 2 тирующие
параторо входы вс ров соед 25 третьего и 2-го д ссответ через д Импульс 30 эленент
2-го клю
(п-З)-г Ьсотрет длч чнко нирс(зат ми вход ве астие кроме т бойка в вдоль о ность к магнитн ла, доп точхами 45 диаметр
35
40
12
0
5 0
вательного соед1шения перлого, второго резисторов и параллельно соедшсен- ных первого, второго и третьего потенциометров, к которой подключен источник опорного напряжения, при этом неинвертирующие входы всех пер- В.1х компараторов, кроме 1-го компаратора 1-го датчика, соединены с первым и пторьэ резисторами, каждый из 3,...,(п-1)-го датчиков подключен к инвертирующему входу одного дополнительного компаратора, иеинпертируощий сход 1-го компаратора 1-го датчика подключен к подвижному контакту 1-го потенциометра, неинаертирующие нходы вторых KOhfnapaTopoB 2, . .., (п-1 )-го датчиков соединены с подунасльи контактом 2-го потешднометра, номнвор- тирующие входы остальных вторых -лон 520
бойка.
параторов, а такхг иеиивертирующие входы всех дополнительных комтрс.то- ров соединены с подвижным контактом 25 третьего потенциометра, П 4ходы 1-го и 2-го дополнительных компараторов ссответстпеино 3-го и 4-го датчихо з через дополнительные фop sИFOвaтeл5 Импульсов связаны с вторыми входами 30 эленентоп И соответстоеино 1-го и
2-го ключей, а вькоды 3-го
(п-З)-го дополпительшлх компаратороо Ьсотретстаепно 5-го,,.,, (п-|)-го длч чнкоп через дополилтельные фор- нирс(затоли импульсон спязаны с ыторы ми входами других элементон И соот- ве астиен.чо 3-го, . . ., (п-З)-го 1а1ючей, кроме того, управляющие проточки бойка выполнены переменной глубины вдоль образующей бойка и на поверхность каждой из н;« нанесен слой ие- магнитного антифр 1кциошюго материала, дополля;лщего части бойка с про- точхами до цилзиодров с одинаковыми 45 диаметрами, превмиающими диаметр
35
40
rHiИ

| Авторское «свидетельство СССР 5432679, кп | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| t | |||
