Изобретение относится к подъемнотранспортному оборудованию и может быть использовано для управления эле тромагнитными кранами, предназначенными для взвешивания и дозирования ферромагнитных материалов, например компонентов шихты, загружаемых в пла вильные агрегаты. Известно устройство для управлени электромагнитным краном, содержащее датчик наличия ферромагнитного материала, подаслюченный к входу порогового элемента и установленный на грузоподъемном электромагните, обмот ка которого через электрический ключ соединена с источником питания, и блок определения включенного состояния электромагнита, вход которого со единен с выходом порогового элемента П . Недостатком данного устройства яв ляется то, что ток подается в обмотк электромагнита после соприкосновения его с поверхностью ферромагнитного материала, причем момент касани оп- ределяется визуально крановщиком. Эт приводит к увеличению времени посадк грузоподъемного электромагнита на фе ромагнитный материал, а следовательн к снижению производительности крана. Цель изобретения - повьпиение производительности крана за счет уменьшения времени посадки грузоподъемног электромагнита на ферромагнитный материал, , Указанная цель достигается тем, что в устройстве для управления элек тромагнитным краном, содержащем датчик наличия ферромагнитного материала, подключеншз1Й к входу порогового-, элемента и установленный на грузоподъемном электромагните, обмотка ко торого через электрический ключ соед нена с источником питания, и блок определения включенного состояния гр зоподъемного электромагнита, вход . которого соединен с выходом порогово го элемента, управляющий вход элект, рического ключа соединен с выходом порогового элемента, датчик наличия ферромагнитного материала представляет собой электромагниты с броневыми магнитопроводами, закрепленными на грузоподъемном электромагните по его периметру и включенными парал лельно друг другу в плечо электрического моста, измерительная диагональ которого подключена к входу выходного усилителя- датчика, а блок определения включенного состояния, грузоподъемного электромагнита выполнен в виде схемы задержки, выход которой связан с схемой управления краном. На чертеже изображена функциональная схема устройства для управления Электромагнитным краном. Грузоподъемный электромагнит 1 подвешен на тросе к крановой тележке 2 с приводом 3 подъема и блоком 4 управления. Для измерения массы набранного электромагнитом 1 ферромагнитного материала служит датчик.5 массы, выход которого подключен через измерительный усилитель 6 и аналого-цифровой преобразователь 7 к микропроцессору 8. Программа дозирования устанавливается в блоке 9 задания и через коммутатор 10 вводится в микропроцессор 8, выход которого связан с тиристорным регулятором I1 тока. По периметру грузоподъемного электромагнита размещены электромагниты 12, выполненные с броневым магнитопроводом датчика наличия ферромагнитного материала. Обмотки электромагнитов 12 соединены параллельно и включены в плечо электрического моста. Выходной сигнал с измерительной диагонали моста, характеризуюпщй ферромагнитного материала под электромагнитом I, подается через усилитель 13 и пороговый элемент 4 на электрический ключ i5, первый выход которого подключен к тиристорному регулятору П, а второй выход к блоку 4 управления приводом 3 подъема через элемент 16 задержки.. Обмотки электромагнитов 12 соединены параллельно для того, чтобы обеспечить поступление сигнала о наличии ферромагнитного материала под грузоподъемным электромагнитом I независимо от рельефа материала. Устройство для управления электромагнитным краном работает следующим образом. Крановая тележка 2 с грузоподъемным электромагнитом 1 перемещается к бункеру с ферромагнитным материалом. Остановка тележки 2 над бункером производится по сигналу от njrreBoго выключателя (не показан) . После остановки тележки 2 от блока 4 управления подается сигнал на привод 3
одъема и электромагнит 1 опускается вниз, причем обмотка электромагниа 1 обесточена. Поскольку поверхости ферромагнитного материала не-, овная, то по достижении зЛектромаг- 5 итом 1 расстоя :.- I, соответствующего порогу чувствительности электромагнитов 12 датчика наличия ферро- магнитного материала, сопротивление по крайней мере одного из них изме- 10 нится, нарушится баланс электраческого моста; и на его измерительной диагонали появится сигнал, свидетельствующий о наличии ферромагнитного материала под электромагнитом 1. 15 Этот сигнал поступает через усилитель 13 и пороговый элемент 14 на электрический ключ 15, который включает тиристорный регулятор 11 тока, и в обмотку электромагнита 1 подает- 20 ся ток в момент достижения электромагнитом расстояния до материала, когда возможен его набор-. Кроме того, электрический ключ 15 через элемент 16 задержки подает сигнал на блок 25 4 .управления и привод 3 подъема отключается. Ферромагнитный материал притягивается к электромагниту 1, после чего по сигналу от блока 4 управления включается привод 3 подъема ЗО и электромагнит 1 поднимается на некот торую высоту для определения массы
набранного материала. Выходной сиг-, нал датчика 5 массы, пропорциональный количеству материала на электромагни-,с те 1, поступает через усилитель 6 и аналого-цифровой преобразователь 7 на микропроцессор 8, управляющий процессом дозирования. В микропроцессор 8 от блока9 задания программы через коммутатор 10 вводят заданные значения доз компонентов шихты. Набор дозы каждого компонента производится за один или несколько приемов в зависимости от величины дозы и грузоподъемности электромагнита 1. С помощью микропроцессора 8 запоминается фактически набранное количество материала в данном цикле дозирования, сравнивается с заданием, вычисляется погрешность данного цикла дозирования и корректируется задание на набор следуняцей дозы с- учетом погрешности предыдущего цикла дозирования..Кроме того, с помощью микропроцессора осуществляется сброс излишка материала в каждом цикле дозирования путем уменьшения тока электромагнита 1. После определения массы набранного материала снова включается привод 3, а затем и привод перемещения крановой-тележки 2. Электромагнит 1 перемещается к загрузочной емкости, куда материал ссьшается после отключения питания. Последующие циклы набора дозирования и транспортировки ферромагнитных материалов повторяются аналогично.
Таким образом, применение предлагаемого ус7ройства позволяет автоматически отключать привод механизма подъема при взаимодействии электромагнита и ферромагнитного материала, что повышает производительность крана.
11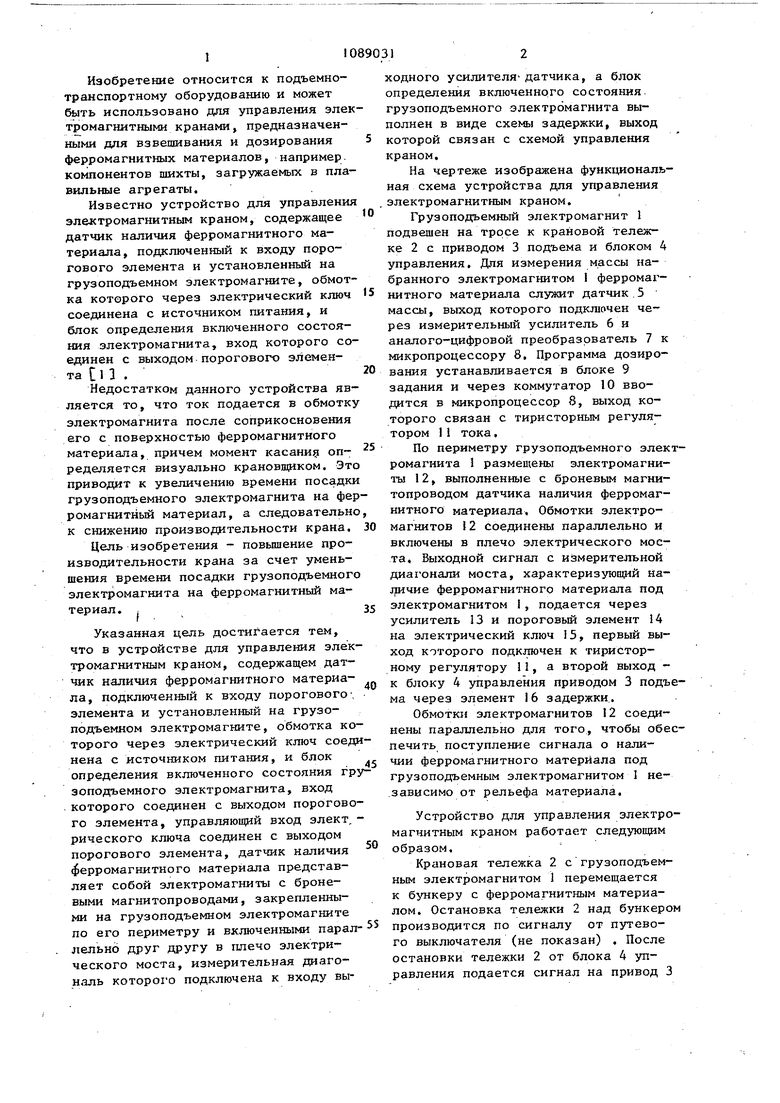

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2001 |
|
RU2220900C2 |
| Устройство для весового дозирования кусковых ферромагнитных материалов | 1988 |
|
SU1606875A1 |
| Крановое массоизмерительное устройство | 1983 |
|
SU1143987A1 |
| Способ определения координат мостового крана | 2021 |
|
RU2767796C1 |
| УСТРОЙСТВО ДЛЯ НАБОРА И ДОЗИРОВАНИЯ МЕТАЛЛИЧЕСКИХ КОМПОНЕНТОВ | 1967 |
|
SU194348A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| Устройство для контроля параметров ферромагнитных изделий | 1985 |
|
SU1298626A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ КРАТКОВРЕМЕННОГО ОБРЫВА ФАЗЫ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ ЭЛЕКТРОПРИВОДА ПРИ СОХРАНЕНИИ РАБОТОСПОСОБНОСТИ И УПРАВЛЯЕМОСТИ ПРИВОДА НА ВРЕМЯ ОБРЫВА | 2016 |
|
RU2631054C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ МАГНИТНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2186381C1 |
| Устройство для управления электромагнитным приводом вибрационного питателя | 1979 |
|
SU783936A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КРАНОМ, содержащее датчик наличия ферромагнитного материала, подключенный к входупорогового элемента и установленный на гру- зоподъемном электромагните, обмотка которого через электрический ключ сое динена с источником питания, и блок определений включенного состояния грузоподъемного электромагнита, вход которого соединен с выходом порогового элемента, отличающееся тем, что, с целью повышения производительности крана за счет уменьщения . времени посадки грузоподъемного электромагнита на ферромагнитный материал, управляющий вход электрического ключа соединен с выходом порогового элемента, датчик наличия ферромагнитного материала представляет собой электромагниты с броневыми магнитопроводами, закрепленными на грузоподъемном электромагните по его периметру и включенными параллельно друг другу в плечо электрического моста, i измерительная диагональ которого подключена к входу выходного усилителя датчика, а блок определения включенного состояния грузоподъемного электромагнита выполнен в виде схемы задержки, выход которой связан с схемой управления краном.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Воздушный доводчик | 1988 |
|
SU1596179A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
