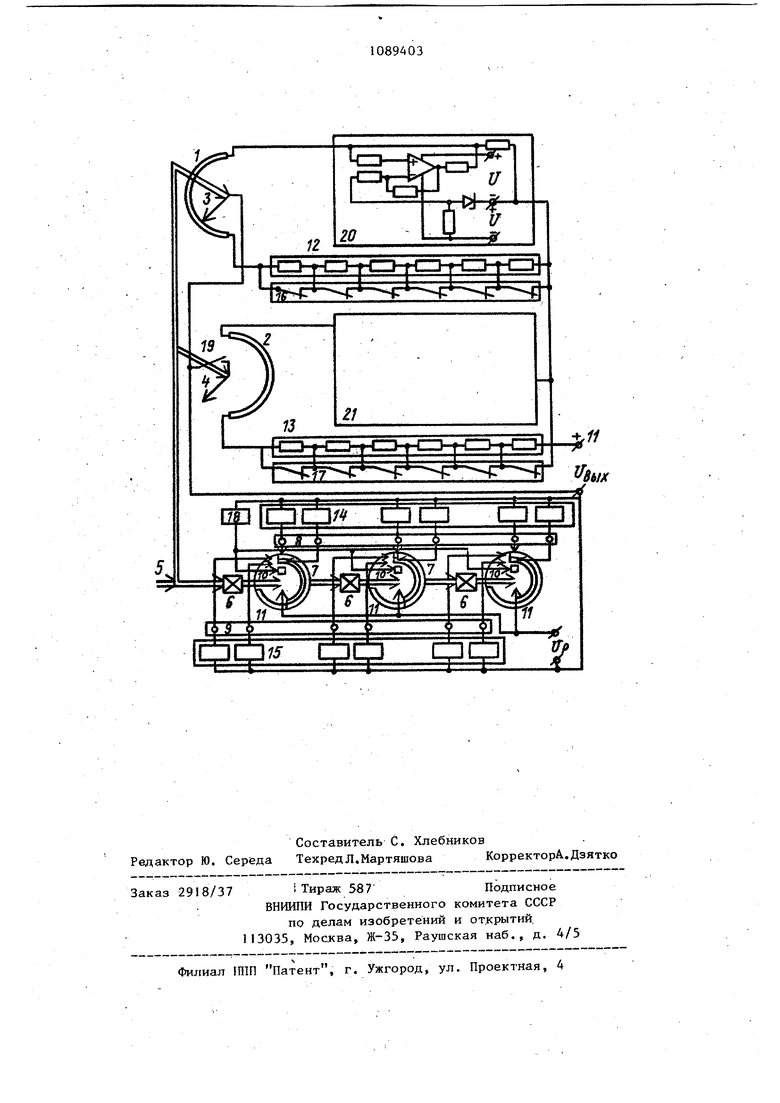
Изобретение относится к автомат ке и предназначено для использован в телемеханических, измерительных и вычислительных системах. Известен многооборотный датчик угла перемещения, содержащий однооборотные потенциометры, резисторы дисковые кодовые преобразователи с блоками щеток, установленные на общей оси, реле и систему коммутации I. Недостатком известного датчика является значительная конструктивная и схемная сложность и малая надежностъ, обусловленная большим кол чеством контактов в магазинах резисторов и системе коммутации. Наиболее близким к предлагаемому является многооборотный датчик угла перемещения, содержащий потенциометры с полукольцовыми обмотками, один вывод каждой из которых соединен с первым выводом соответствующе параллельной цепи, состоящей из включенных последовательно резисторов, оси щеток данных поте1нциометров кинематически связаны с входйой осью датчика и осью многоступенчато го позиционного кодового преобразователя, вывод каждой из первых считывающих щеток которого соединен с первым выводом обмотки соответствую щего коммутирующего реле, питающие щетки данного преобразователя подключены к одному выводу источника питания вывод щетки первого потенциометра является выводом датчика, выводы вторых считывающих щеток мно гоступенчатого позиционного кодовог преобразователя соединены с одним выводом блокирующего реле, другой вывод которой соединен с вторыми выводами обмоток всех коммутирующих реле и другим выводом источника питания Cz. Недостатком указанного датчика также являются недостаточные точность и надежность из-за незначительного числа контактных элементов Цель изобретения - повышение точ Н0СТИ и надежности и упрощение многооборотного датчика угла перемещеУказанная цель достигается тем, что многооборотный датчик угла пере мещения, содержащий потенциометры с полукольцевыми обмотками, один вывод каждой из которых соединен с первым выводом соответствующей параллельной цепи, состоящей из включенных последовательно резисторов, оси щеток данных потенциометров кинематически связаны с входной осью.датчика и осью многоступенчатого позиционного кодового преобразователя, вывод каждой из первых считывающих щеток которого соединен с первым выводом обмотки соответствукяцего коммутирующего реле, питающие щетки данного преобразователя подключены к одному выводу источника питанияу вывод щетки первого потенциометра является выводом датчика, выводы вторых считывающих щеток многоступенчатого позиционного кодового преобразователя соединены с одним выводом обмотки блокирующего реле, другой вывод которой соединен с вторыми выводами обмоток всех коммутирующих реле и другим выводом источника питания, содержит генераторы тока, выход каждого из которых подключен к другому выводу полукольцевой обмотки соответствующего потенциометра, вторые выводы обоих параллельных цепей соединены с общей шиной датчика, размыкающий контакт каждого из коммутирующих реле включен параллельно соответствующему резистору первой и второй параллельной цепей, и замыкающий контакт блокирующего реле включен между выводами щеток обоих потенциометров. На чертеже представлена принципиальная электрическая схема предлагаемого датчика. Мнсгооборотный датчик угла перемещения содержит два потенциометра с полукольцевыми обмотками 1 и 2 и щетками 3 и 4, оси которых кинематически связаны с входной осью датчика 5 и через редукторы 6 - с осями кодирующих дисков 7 многоступенчатого позиционного кодового преобразователя (например, 3-х ступенчатого), блоками первых считывающих щеток 8 и 9 (щеток объема данных), вторыми считывающими щетками 10 и питающими щетками 1 Т цепи включенных последовательно резисторов. (управляемые многорегистровые магазины цифровых резисторов) 12 и 13; коммутирующие реле (по числу резисторных регистров) с обмотками 14 и 15 и размыкающими контактами 16 и 17 (в регистрах магазинов резисторов 12 и 13 соответственно), блокирующее реле с оботкой 18 и замыкающим контактом 19 110 и генераторы тока 20 н 21. Двухсекционный интерполирующий потенциометр 1 и 2 предназначен для однознач ного преобразования угловых или линейных перемеи1ений исполнительных органов машин в опорциональные им электрические сигналы. Управляемые магазины резисторов 12 и 13 предназначены для последовательного формирования в пределах.каждого из интерполирующих .участков расчетных опорных напряжений. Многоступенчатый позиционный кодовый преобразова ;Тель 7 вместе с коммутирующими реле 114 и 15 управляет сопротивлением управляемых магазинов резисторов 12 и 13 в соответствии с поворотом вход ной оси датчика 5. Генераторы тока 20 и 21 поддерживают постоянную величину тока в обмотках потенциометров 1 и 2 и резисторах многорегистровых магазинов 12 и 13 благодаря чему на обмотках потенциометра 1 и 2-поддерживается постоянное падение напряжения, а потенциал между первыми (нижними по схеме) выводами потенциометров и общим проводом зависит от величины сопротивления соответствующего магазина резисторов 12 или 13. Датчик работает следующим образом При повороте входной оси 5 датчика поворачиваются щетки 3 и 4 потенциометров 1 и 2 осуществляя скользя щий контакт и съем напряжения с обмо ток. При этом через редукторы 6 поворачиваются диски 7 многоступенчато го позиционного кодового преобразова теля. При повороте оси 5 от О до 90 обмотки 14 коммутирующих реле, подключенные к выходам блока 8 щеток съема данных, отключены от источник питающего напряжения Up следовательно, резисторы многоразрядного магазина I2 зашунтированы контактами 16 этих реле. Потенциал первого (ниж него по схеме) вывода обмотки потен .циометра 1 равен относительно общего провода датчика. Щетка 4 отключена от выхода, так как на блокировочное реле 18 не подается питающее напряжение через дополнитель ные щетки 10. При повороте оси 5 на угол 90 ai 180 поступает напряжение с кодирующего диска 7 младшего разряд через первые щетки блока 9 съема да ных и вторую считын;№ |цую шетку 10 а обмотку реле младшего разряда лока I реле 15 и обмотку блокируюего реле 18. В результате в цепь бмотки потенциометра 2 включится езистор младщего разряда магазина 13, равный по величине сопротивле- |t ию обмоток потенциометров 1 и 2, замкнется контакт 19 блокирующего еле 18, подключая щетку 4 потен- . иометра 2 к выходной цепи датчика, ак как щетка 4 потенциометра 2 ри повороте оси 5 в пределах от О о 180 не контактирует с обмоткой отенциометра 2, то напряжение на ыводе датчика равно нгшряжению, нимаемому щеткой 3 с обмотки поенциометра I. Это напряжение равно U .-„о оС где R - сопротивление обмотки потенциометров I и 2 (Ом); 3 - ток rta выходе генератора тока 20 и 21 А); оС - угол поворота оси 5 датчика (град.). При повороте оси 5 датчика на угол 0 180 щетка 4 потенциометра 2 входит в контактирование с первым (нижним по схеме) выводом обмотки 2 потенциометра, и щетка 3 с вторым (верхним по схеме } выводом обмотки I. потенциометра. Так как сопротивление резистора младшего разряда магазина 13 резисторов равно R, то потенциалы обоих щеток теоретически равны и равны U КЗ. При дальнейшем повороте оси 5 щетка 3 сходит с обмотки 1 потенциометра, а щетка 4 скользит по обмотке 2 потенциометра, осуществляя преобразование угла поворота оси 5 в выходные напряжения U, . При повороте оси 5 на угол oL 270 с кодирующего диска 7 младщего разряда кодового преобразователя поступает напряжение на обмотку реле младшего разряда блока 14 коммутирующих реле через блок 8 щеток съема данных, размыкающий контакт которого включает в цепь обмотки 1 потенциометра резистор младшего разряда магазина резисторов.12, Величина этого резистора равна 2R, т.е. потенциал первого (нижнего по схеме) вывода обмотки 2 потенциометра становится равным и 2RJ. При повороте оси 5 на угол оС 360° щетка 3 потенциометра 1 входит в контактирование с первым (нижним по схпме) выводом обмотки 1 потенциометра, а щетка 4 - с вторым (верхним по схеме) выводом обмотки потенциометра, потенциал которого также равен U 2RJ. Таким образом, при подготовке цепей потенциометров заранее (пёреклочение резисторов магазинов 12 и 13 в моменты времени когда соответствующие щетки не контактируют со своими обмотками) и при выравнивании потенциалов соответствукщих точек обмоток потенциометров может осуществляться непрерывный съем сигнала., .пропорционального углу поворота оси 5 датчика.
При дальнейшем повороте оси 5 происходит включение в цепь обмоток резисторов следующих разрядов магазинов 12 и 13 сопротивлений . соответствующих углу поворота оси 5, что позволяет снимать с этих обмото потенциал, соответствующий углу поворота оси 5 более 360 .
При соотношении величин сопротивлений резисторов соседних регистров каждого магазина резисторов как 2:1, общее сопротивление резисторов, включенных в цепь обмоток 2
второго потенциометра, равно Rj R(2n - 1), где п - номер текущего оборота оси 5 датчика. Для создания N оборотного потенциометра R2 то1л - R(2N -1), при этом ), где К - количество разрядов в магазине резисторов 13, отсюда К 1, т.е. для создания аналога 32-оборотного потенциометра требуется 6-ти разрядный магазин 13 резисторов. При этом напряжение на выходе, снимаемое с потенциометра. 2, равно
lfeb,xmc,x IR(2N-1) ч-R 2NR1. При использовании потенциометров с погрешностью по линейное™ обобщая нелинейность будет т.е. получен аналог многооборотного потенциометра со сколь угодно высокой линейностью.
Предлагаемый датчик по сравнению с прототипом, принятым за базовый объект, позволяет упростить схему, уменьшить количество контактов в каждом регистре магазинов резисторов с шести до одного и повысить надежность при повышении точности (падение напряжения на контактах снижено в 3 раза).


| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГОВЫЙ ИНТЕРПОЛИРУЮЩИЙ ДАТЧИК ОБРАТНОЙ СВЯЗИ | 1973 |
|
SU383002A1 |
| Преобразователь перемещения в код | 1978 |
|
SU752433A1 |
| Цифро-аналоговая система программногоупРАВлЕНия | 1977 |
|
SU819793A1 |
| Интегрирующий реверсивный привод | 1979 |
|
SU811287A1 |
| ПРЕОБРАЗОВАТЕЛЬ КОДА В УГЛОВОЕ (ЛИНЕЙНОЕ) ПОЛОЖЕНИЕ | 1962 |
|
SU150307A1 |
| ПРОГРАММИРУЮЩЕЕ УСТРОЙСТВО | 1968 |
|
SU206890A1 |
| Бесконтактное кодоимпульсное телеизмерительное устройство | 1960 |
|
SU147117A1 |
| Преобразователь код-аналог | 1973 |
|
SU487459A1 |
| Электромеханическое устройство для возведения в квадрат | 1950 |
|
SU98500A1 |
| Устройство для дистанционного управления и защиты мобильного электроагрегата | 1974 |
|
SU517109A1 |
МНОГООБОРОТНЫЙ ДАТЧИК УГЛА ПЕРЕМЕЩЕНИЯ, содержащий потенцио метры с полукольцевыми обмотками, один вывод каждого из которых соединен с первым выводом соответствующей параллельной цепи, состоящей из включенных последовательно резисторов, оси щеток данных потенциометров кинематически связаны с входной осью датчика и осью многоступенчатого позиционного,кодового преобразователя, вывод каждой из первых считывающих щеток которого соединен. с первым выводом обмотки соответствующего коммутирующего реле, питающие.щетки данного преобразователя подключены к одному выводу источника питания, вывод щетки первого потенциометра является выводом датчика, выводы вторых считывакицих щеток многоступенчатого позиционного кодового преобразователя соединены с одним выводом обмотки блокирующего реле, другой вывод которой соединен с вторыми выводами обмоток всех коммутирующих реле и другим выводом источника питания, отличающий с я тем, что, с целью повыi шения точности и надежности и упрощения датчика, он содержит генера(Л торы тока, выход каждого из которых подключен к другому выводу полукольцевой обмотки соотретствующего потенциометра, вторые выводы обоих параллельных цепей соединеныс общей шиной датчика, раз№ 1кающий контакт каждого из коммутирующих реле . включен параллельно соответствующе00 со му резистору первой и второй параллельной цепей, а замыкающий контакт 4 блокирующего реле включен между выводами щеток обоих потенциометров. О со
| I | |||
| АНАЛОГОВЫЙ ИНТЕРПОЛИРУЮЩИЙ ДАТЧИК ОБРАТНОЙ СВЯЗИ | 0 |
|
SU383002A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Плоский Ю.И., Рази А.А | |||
| Универсальный датчик обратной связи систем программного управления машин | |||
| - Производственно-технический бюллетень | |||
| Технология авиационного приборо- и агperатостроения, 1981, № 3, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
