1
Изобретение относится к области автоматического управления и может быть использовано в системах автоматического числового программного управления исполнительными органами машин и механизмов, совершающими в процессе работы последовательные прямолинейные перемешения, траектория которых может часто изменяться по технологическим или эксплуатационным соображениям. В частности, предлагаемая система может быть применена для программного управления горнопроходческими комбайнами с рабочим органом избирательного действия, бурильными установками и другими горными машинами и комплексами.
Известна цифроаналоговая система программного управления, в которой управление перемещением управляемого элемента производится по моделирующему принципу, при этом устройство сравнения включено в диагональ мостовых схем, образованных задающими потенциометрами и потенциометрами обратной связи .
Наиболее близким техническим решением к изобретению является система программного управления, содержащая магнитный барабан со считывающими и записывающими головками и шаговым приводом, и считывающий усилитель, вход которого подключен к считывающим головкам, а выход - к первому входу блока сравнения, подсоединенного вторым входом к выходу многоканального цифрового датчика положения исполнительного элемента, а выходом - ко входу блока управления исполнительным элементом {2.
В данной системе фактическое положение исполнительного элемента, информация о котором, представленная в двоичном коде, сравнивается с входной командой, а разница между этими цифровыми входными данными используется для управления перемещением исполнительного элемента в заданную позицию, представленную кодом входной команды.
Применение условного и натурального двоичного кода ограничивается возможностью возникновения значительных ошибок. Для уменьшения последних в других системах этого типа применяется рефлексный двоичный код, в этих случаях для сравнения сигналов о фактическом и заданном положениях управляемого элемента используется промежуточный код. Применение промежуточного кода хотя и решает задачу сравнения входных цифровых данных, однако появляются дополнительные сложности при обслуживании подобных систем, что существенно ограничивает
область их применения, особенно в тяжелых условиях эксплуатации.
Недостатком известных систем является механическая связь между собой круговых потенциометрических датчиков разных разрядов, невозможность непосредственного применения круговых потенциометров и сложность оперативной корректировки заданного положения управляемого элемента. Последнее обусловлено тем, что корректировка производится либо механически вращением вала задатчика программы - сельсина или вращающегося трансформатора, либо разбалансировкой мостовых схем. При разбалансировке корректировка на величину, кратную одной ступени низшего разряда, возможна только в пределах одной ступени более высокого разряда. При необходимости корректировки на большую величину коррекцию необходимо вводить также и в более высокий разряд (канал отсчета). В общем случае коррекцию необходимо вводить отдельно в каждый разряд (канал отсчета). Последнее весьма затрудняет автоматический и дистанционный ввод коррекции в оперативном порядке.
Целью изобретения являются повышение точности работы и расширения области применения системы за счет создания гибкой системы программного управления перемещением управляемого элемента с автоматической записью информации в процессе выполнения образцового цикла управления, в которой фактическое и заданное положения управляемого элемента представлены в виде цифрового кода, а автоматическое управление его перемещением осуществляется по принципу аналоговых следящих систем, позволяющих простыми техническими средствами осуществлять дистанционный или автоматический контроль как величины, так и скорости отработки запрограммированных перемещений, а также системы, допускающей корректировку программы перемещений исполнительного элемента подвижной машины сравнительно простыми средствами, без дополнительных изменений преобразователя код - напряжение или устройства сравнения, а также автоматический (по команде от задатчика направления подвижной машины) или дистанционный (с пульта дистанционного управления) ввод дискретного корректирующего сигнала по одному каналу связи и только в канал точного отсчета преобразователя код - напряжение.
Поставленная цель достигается тем, что в цифроаналоговую систему программного управления, содержащую задатчик программы, первый вход которого соединен с выходом щагового привода, вторые входы- с выходами устройства ввода программы, а выходы - с первыми входами многоканального преобразователя код -
напряжение, подключенного выходами ко входам устройства сравнения, а вторыми входами через преобразователь кода - к выходам многоканального цифрового датчика положения исполнительного элемента, а также усилитель сигналов точного отсчета, выход которого соединен со входами шагового привода и блока управления исполнительным элементом, и усилитель сигналов грубого отсчета, подключенный входом к выходу грубого отсчета устройства сравнения, введены пороговое устройство и клапан, информационный вход которого соединен с выходом точного отсчета устройства сравнения, а выход - со входом усилителя сигналов точного отсчета, подключенным к управляющему входу клапана и через пороговое устройство к выходу грубого отсчета устройства сравнения.
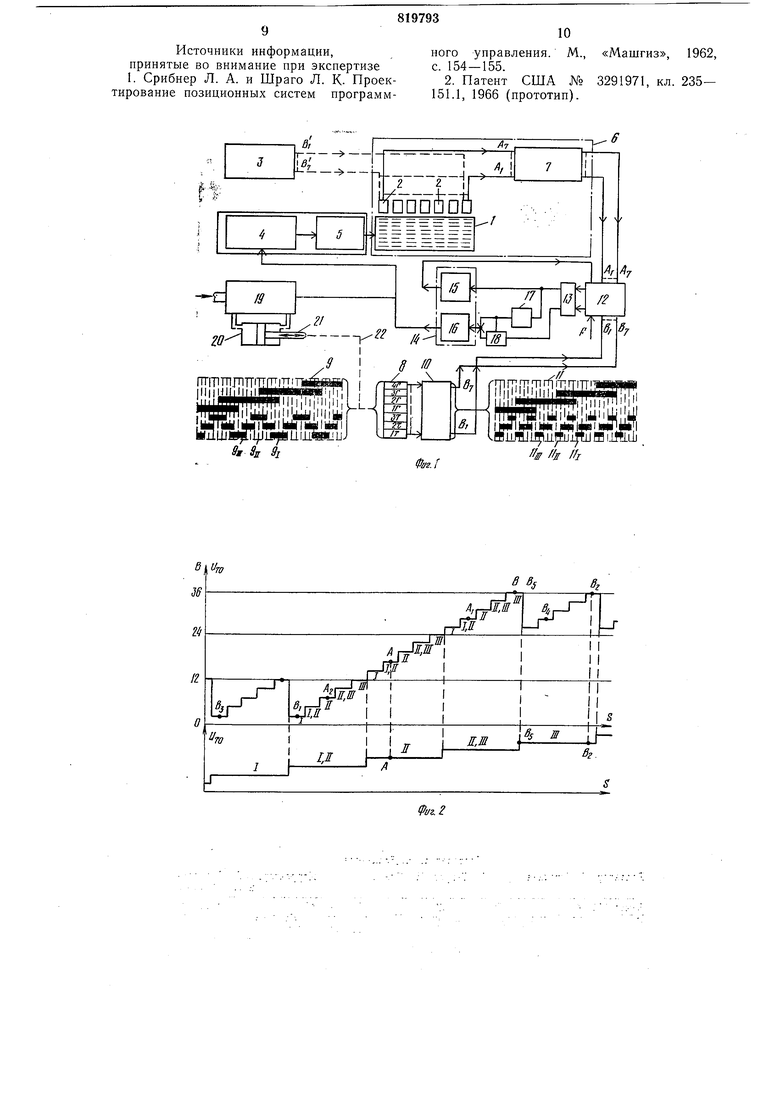
На фиг. 1 представлена структурная схема системы; на фиг. 2 - диаграмма его работы.
На чертежах обозначены магнитный барабан 1 со считывающими и записывающими головками 2, устройство ввода программы 3, блок управления 4, щаговый двигатель 5, задатчик программы 6, состоящий из барабана 1, головок 2 и усилителей считывания 7, многоканальный цифровой датчик положения 8 исполнительного элемента с кодовой маской 9, преобразователь кода 10 с кодовой маской 11, многоканальный преобразователь код - напряжение 12, устройство сравнения 13, блок усилителей 14, состоящий из усилителей сигналов грубого 15 и точного 16 отсчета, пороговое устройство 17, клапан 18 и блок управления 19 исполнительным элементом 20 со штоком 21, соединенным связью 22 с датчиком 8, причем блок 4 и двигатель 5 образуют шаговый привод 23.
На фиг. 2 показана иллюстрация процесса изменения электрического напряжения на выходах каналов грубого (t/r. о) и точного (t/T. о) отсчета преобразователя 12 в процессе перемещения (S) исполнительного элемента 20. Цифрами I, II, III указаны контакты реле преобразователя 10, которые замкнуты на данном участке характеристики.
Барабан 1 предназначен для записи на него дискретных магнитных меток. Головки 2, число которых равно числу разрядов применяемого в системе цифрового двоичного кода, обеспечивают запись и считывание с барабана 1 магнитных меток. Устройство ввоДа программ 3 предназначено для подачи электрического импульса записи в соответствующие обмотки головки 2. Блок 4 служит для кратковременного включения двигателя 5 с целью поворота барабана 1 на один шаг. Обмотки считывания магнитных головок соединены со входом усилителей считывания 7 с выходными реле, предназначенными для усиления электрического сигнала, снимаемого с выхода магнитных головок при наличии магнитной метки. Преобразование датчиком 8 осуществляется с помощью электрических контактов систем гпубого и точного отсчетов 1Г... 4Г и IT... ЗТ, диаграмма срабатываний которых представлена кодовой маской 9.
Выходной сигнал датчика 8 представляет собой цифровой двоичный код, в котором кодовые комбинации каждого канала отсчета содержат максимум две единицы в соседних разрядах, при этом число разрядов кода соответствует числу контактов датчика, а их замкнутое или разомкнутое состояние определяет соответственно условную «1 или условный «О двоичного кода. Преобразователь 10 предназначен для реверса кода канала точного отсчета (при наличии двух единиц в коде канала грубого отсчета) датчика 8 и преобразования его в вид, представленный маской 11. Преобразователь 12 выполнен в виде двух делителей напряжения (отдельно для каждого канала отсчета) с числом ступеней по числу разрядов цифрового кода каждого канала отсчета. К узловым точкам делителей через одинаковые сопротивления подсоединены одни выводы контактов реле преобразователя 10 и усилителей 7, вторые выводы которых соответственно их принадлежности устройствам и каналам отсчета соединены вместе и образуют выходы преобразователя 12 в каналах грубого и точного отсчета. Последовательно с делителем напряжения канала точного отсчета с двух сторон подключены два одинаковых делителя, величина ступеней которых равна или кратна одной ступени делителя грубого отсчета. Узловые точки этих делителей образуют дополнительные входы ппеобразователя 12. Устройство сравнения 13 предназначено для сравнения (отдельно в каждом канале отсчета) напряжений, соответствующих фактическому и заданному положениям управляемого элемента, и формирования в каждом канале отсчета сигналов рассогласования, величина и фаза которых характеризует величину и направление необходимого перемещения управляемого элемента. Блок 14 снабжен усилителями 15 и 16 Сфазочувствительными трехпозиционными, настроенными таким образом, что каждый из них срабатывает при входном напряжении, равном одной ступени напряжения, снимаемого с соответствующего делителя.
Устройство 17 выполнено в виде дополнительного фазочувствительного трехпозиционного усилителя, имеет чувствительность в два раза ниже чувствительности усилителя 15 и настроено таким образом, что срабатывает при входном напряжении, равном или больщем, чем напряжение, снимаемое с двух ступеней делителя грубого отсчета преобразователя 12.
Кодовая маска 9 и электрическая схема соединений контактов датчика 8 выполнены таким образом, что фактическое положение элемента 20 в системах грубого и точного отсчета представляется с помощью рефлексного двоичного кода, содержащего одну, максимум две единицы в соседних разрядах. При этом началу каждой зоны канала грубого отсчета соответствует единица в высщем или низщем разряде рефлексного кода канала точного отсчета. Система работает следующим образом. Перед началом воспроизведения с помощью устройства 3 (дистанционно или
автоматически) барабан 1 задатчика 6 устанавливается в исходное положение. Допустим, что на этом щаге барабана записана кодовая комбинация llni маски 11, соответствующая заданному положению
элемента 21. Па выходе обмоток считывания головок 2, под которыми имеются метки, появляется сигнал, поступающий на вход усилителей 7, включая выходные реле усилителей. Включившись, эти реле по каналу At-A замыкают свои контакты в преобразователе 12, на задающих частях делителей каналов грубого и точного отсчета которого появляются напряжения, соответствующие позиции UHI элемента 21
(точка А на фиг. 2). Предположим, что управляемый элемент находится в положении 9 маски 9. В этом положении замкнуты контакты IT, 2Г, и ЗГ датчика 8, код канала точного отсчета среверсирован согласно диаграмме маски. По каналу Si-BV реле преобразователя 10 замыкают свои контакты в преобразователе 12, на отрабатывающих частях делителей каналов грубого и точного отсчета которого появляется напряжение, соответствующее позиции III управляемого элемента (точка В на фиг. 2). Так как в канале грубого отсчета существует напряжение рассогласоВания величиной в одну ступень, то срабатывает усилитель 15. Сигнал с его выхода поступает на вход преобразователя 12 и воздействует на него таким образом, что для питания отрабатывающей части делителя напряжения точного отсчета используется верхняя треть напряжения питания делителя точного отсчета. Например, при напряжении питания делителя 36 В для питания отрабатывающей части будет использован диапазон напряжения 24-
36 В. Если бы управляемый элемент перемещался в точку А из позиции, соответствующей точке Si, то сработало бы противоположное плечо усилителя 15, сигнал его выхода поступал бы на вход преобразователя 12 и воздействовал на него таким образом, что для питания отрабатывающей части делителя точного отсчета использовался бы диапазон напряжения О-12S. В то же время напряжение питания задающей части этого же делителя в любом случае находится в диапазоне 12-24В. Так как напряжение срабатывания устройства 17 равно по величине двум ступеням напряжения, снимаемого с делителя грубого отсчета, то он не сработает и на управляющем входе клапана 18 сигнал будет отсутствовать, разрешая прохождение сигнала рассогласования с делителя точного отсчета на вход усилителя 16, который, включившись, подает напряжение на одну из обмоток электрогидрозолотника блока 19 и на вход привода 23, в котором подготавливается к срабатыванию блок 4 и двигатель 5. В данном случае электрогидрозолотник, включившись, соединяет левую полость гидроцилиндра элемента 20 с напорной магистралью, и шток 21 начинает перемешаться вправо. При перемеш,ении элемента 21 из позиции, соответствуюшей точке В в точку А, согласование поступает .сначала в канал грубого отсчета, усилитель 15 отключается, его воздействие на преобразователь 12 прекращается, и напряжение питания отрабатываюш,ей части делителя точного отсчета переходит в диапазон 12- 24 В. Но до тех пор, пока управляемый элемент не достигнет заданной позиции, сушествует рассогласование в канале точного отсчета. Описанный выше способ подключения выхода усилителя 15 позволяет в пределах трех ступеней цифрового кода канала грубого отсчета в области записанной позиции элемента преобразовать периодическую ступенчатую характеристику канала точного отсчета в непрерывную ступенчатую (см. фиг. 2). Последнее позволяет корректировать заданное положение управляемого элемента в этих же пределах путем разбалансировки делителя точного отсчета по команде F, поступаюш,ей на вход преобразователя 12.
В случае корректировки заданной позиции управляемого элемента 21 из точки А в точку AI (Az) и перемешении последнего в заданную точку из точки В (Bi) процесс управления п.еремеш;ением происходит аналогично описанному (см. фиг. 2). Если же перемешение исполнительного элемента происходит из точки BZ (Ss), то в зонах выходной характеристики канала грубого отсчета, соседних с зоной, в которую скорректировано положение элемента, может наступить согласование и даже реверс сигнала рассогласования в канале точного отсчета. Например, при движении в скорректированную точку Ai из точки В может поступить согласование при достижении управляемым элементом позиции 64. Для устранения ошибки в этом случае сигнал рассогласования в канале грубого отсчета, равный по величине двум ступеням напряжения, снимаемого с делителя грубого отсчета (так как была записана точка А), включает устройство 17, которое, воздействуя одновременно на вход усилителя 16 и
управляюш,ий вход клапана 18, запреш,ает прохо кдение сигнала рассогласования каиала точного отсчета на вход усилителя 16, но одновременно включает этот же усилитель таким образом, что он управляет перемещением исполнительного элемента 20 до момента отключения устройства 17 (точка В.5 фиг. 2). Начиная с этого момента, клапан 18 начинает пропускать сигнал рассогласования точного отсчета, и управление перемещением протекает по вышеописанному принципу до остановки управляемого элемента в скорректированной точке AI. В этот момент магнитный барабан перемещается на один шаг по команде, поступающей с усилителя 16 на блок 4 и далее на шаговый двигатель 5. На выходе задатчика 6 появляется сигнал, соответствующий следующему запрограммированному положению управляемого, элемента. Это перемещение отрабатывается описанным выше образом
Предложенная система позволяет оперативно вводить сигнал коррекции от задатчика направления подвил :ной машины или с пульта управления, позволяющий скорректировать заданное положение управляемого, элемента в диапазоне трех ступеней канала грубого отсчета. При корректировке на большую величину целесообразно записать новую программу перемещений.
Формула изобретения
Цифроаналоговая система программного управления, содержащая задатчик программы, первый вход которого соединен с выходом щагового привода, вторые входы- с выходами устройства ввода программы, а выходы - с первыми входами многоканального преобразователя код - напряжение, подключенного выходами ко входам устройства сравнения, а вторыми входами через преобразователь кода-к выходам многоканального цифрового датчика положения исполнительного элемента, а также усилитель сигналов точного отсчета, выход которого соединеи со входами щагового привода и блока управления исполнительным элементом, и усилитель сигналов грубого отсчета, подключенный входом к выходу грубого отсчета устройства сравнения, отличающаяся тем, что, с целью расщирения области применения и повышения точности работы системы, в нее введены пороговое устройство и клапан, информационный вход которого соединен с выходом точного отсчета устройства сравнения, а выход - со входом усилителя сигналов точного отсчета, подключенным к управляющему входу клапана и через пороговое устройство к выходу грубого отсчета устройства сравнения. Источники информации, принятые во внимание при экспертизе 1. Срибнер Л. А. и Шраго Л. К. Проектирование позиционных систем программ M IJkHJ4lUwi
ILwii jipiJTjj Я 1Жш fl ifi
г.1 ного управления. М., «Машгиз, 1962, с. 154-155. 2. Патент США № 3291971, кл. 235- 151.1, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Двухотсчетный преобразователь синусно-косинусно-модулированных сигналов переменного тока в код | 1985 |
|
SU1283969A1 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| Двухотсчетный преобразователь угол - код | 1986 |
|
SU1496606A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
