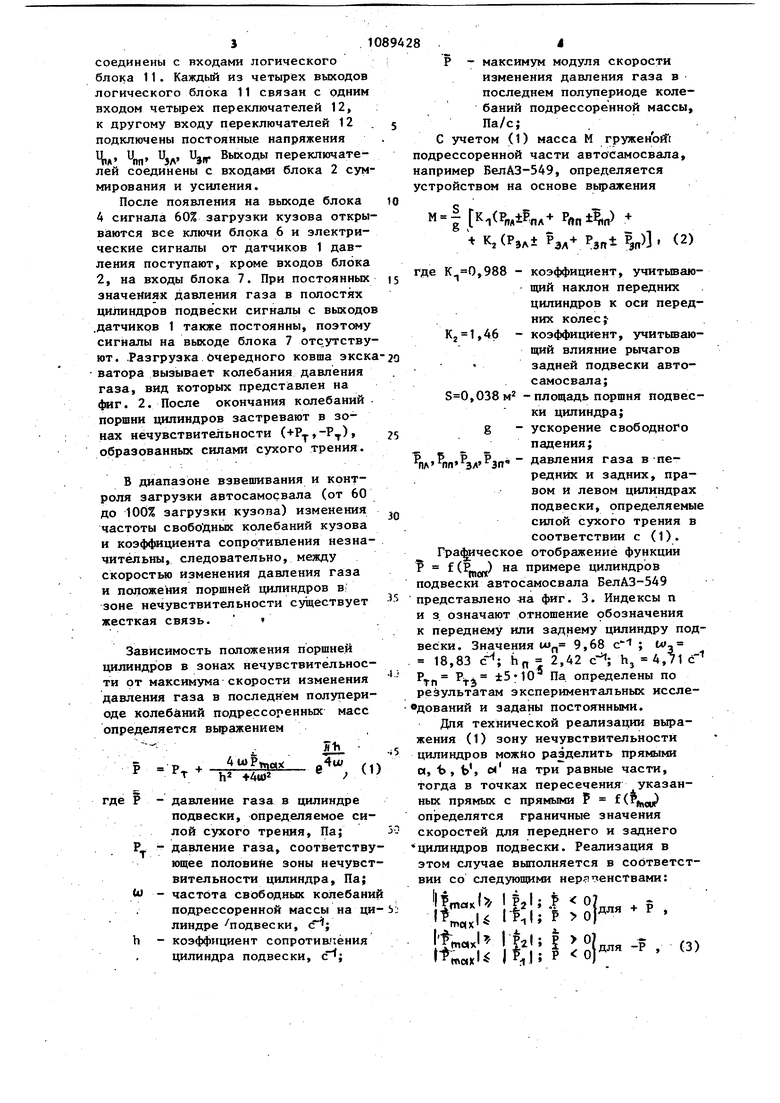
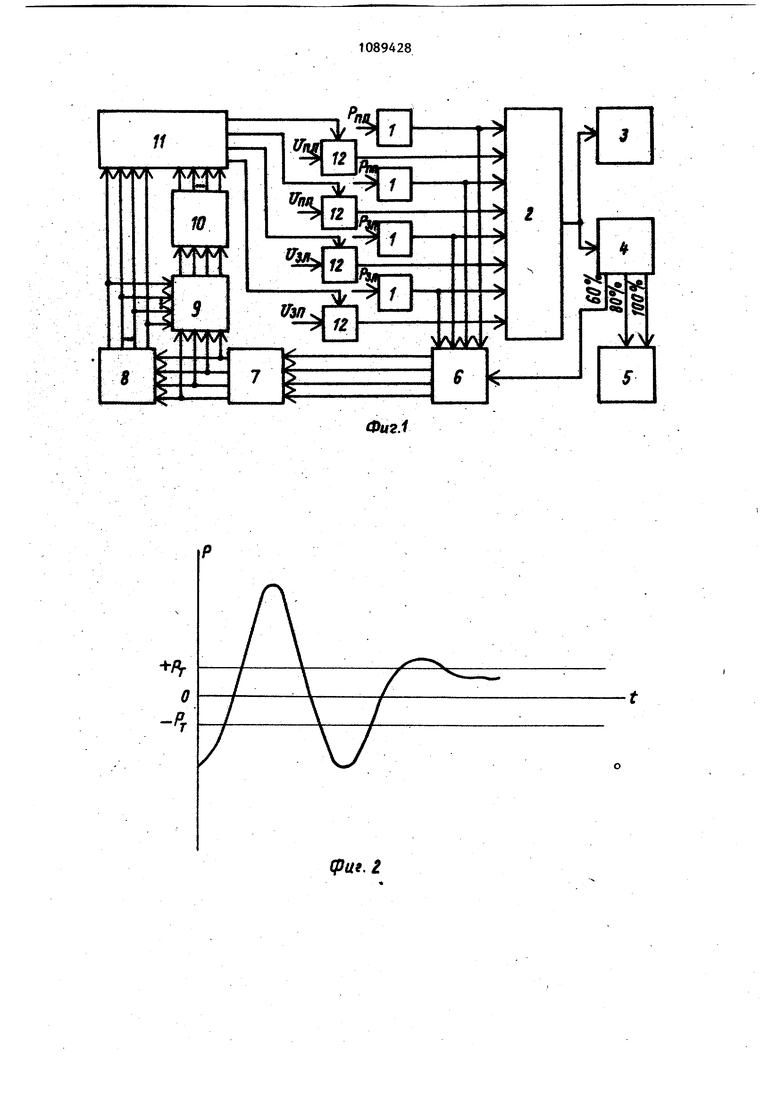
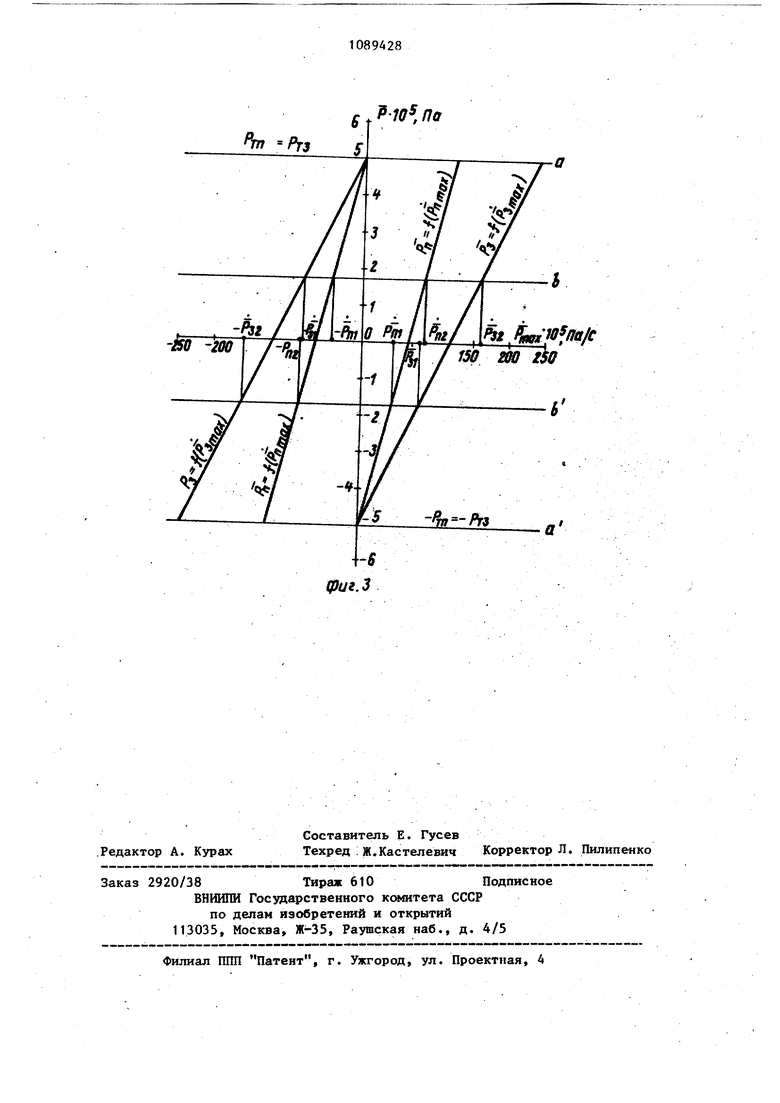
Изобретение относится к весоизмерительной технике и может быть использовано в горной, строительной и других отраслях народного хозяйства для контроля загрузки автосамосвалов и оперативного взвешива|ния грузов, перевозимых автотранспортом. Известно устройство для взвешива ния ц суммирования веса массы, пере возимой в кузове автосамосвала., содержащее датчик давления, соединенный трубопроводом с гидроцилиндром подъема кузова, а также указатель веса Cl 3. Однако устройство обладает низко точностью взвешивания, рбусловленной неоднозначностью координаты центра тяжести груза относительно оси опрокидывания кузова при каждой загрузке автосамосвала. Наиболее близким по технической сущности к изобретению является уст ройство для взвешивания грузов в ку зове большегрузного автосамосвала, содержащее датчики-давления, блок суммирования и усиления, сигнальный блок и выходной прибор, причек| выходы датчиков давления соединены с выходом блока суммирования и усиления, выход которого соединен с входом выходного прибора и сигнального блока С 2 J. Недостаток известного устройства низкая точность взвешивания, обусло ленная сухим трением контактирующих поверхностей поршня в цилиндрах пневмогидроподвесок. Цель изобретения - повьшгение точности взвешивания массы груза за счет снижения погрешности от силы сухого трения в цилиндрах пневмогидроподвесок., Указанная цель достигается тем, что в устройство, содержащее датчик давления, блок суммирования и усиле ния, сигнальный блок и выходной при бор, причем выходы датчиков давления соединены с входами блока сумми рования и усиления, выход которого соединен с входом выходного прибора введены логический блок, блок дифференциаторов, блок компараторов знака скорости, блок амплитудных де текторов, блок компараторов амплиту ды скорости, переключатели, блок ключей и блок пороговых элементов, при этом входы логического блока со динены с выходами блока компараторо знака скорости и блока компараторов амплитуды скорости, а выходы -.с входами переключателей, выходы последних соединены с входами блока суммирования и усиления, а его выход - с входом блока пороговых элементов, два выхода которого соедине- ны с входами сигнального блока, а третий - с одним из входов блока ключей, четыре других входа блока ключей соединены соответственно с выходами датчиков давления, а выходы блока ключей - с входами блока дифференциаторов, выходы которого соединены с входами блока компараторов знака скорости и блока- амплитудных детекторов, другие входы последнего соединены с выходами блока компараторов знака скорости, .а вы;ходы - с входами блока компараторов амплитуда скорости. На фиг. 1 схематически изображено предлагаемое устройство; на; фиг. 2 - вид колебаний давления газа в цилиндре подвески при разгрузке ковша экскаватора в кузов; на фиг. 3 график зависимости положения йоршня цилиндра подвески в зоне нечувствительности от максимума скорости изменения давления газа в последнем полупериоде колебаний подрессоренных масс автосамосвала. Устройство состоит из четьфех 1 Давления, подсоединенных датчиков полостям цшшцдров подвески и подключенных к входу блока 2 сумю1рования и усиления, вькод которого соединен с выходным прибором 3 и . блоком 4 пороговых элементов. Выходы 80 и 100% загрузки кузова блока 4 пороговых элементов соединены с входами сигнального блока 5, а вькод 60% загрузки кузова - с одним входом блока 6 кпючей. Четыре других входа блока 6 ключей соединены с выходами датчиков 1 давления. Четьфе выхода блока 6 ключей связаны с входами блока 7 дифференциаторов, к выходам которого параллельно подключены входы блока 8 «компараторов знака скорости и блока 9 амплитудных детекторов. Другие входы блока 9 амплитудных детекторов соединень с выходами блока 8 компараторов знака скорости. К выходам блока 9 амплитудных детекторов подключен блок 10 компараторов амплитуды скорости, выходы которого наряду с выходами блока 8 компараторов знака скорости соединены с входами логического блока 11. Каждый из четырех выходов логического блока 11 связан с одним входом четырех переключателей 12, : к другому входу переключателей 12 5 подключены постоянные напряжения 4in зл Э(Г Выходы переключателей соединены с входами блока 2 суммирования и усиления. После появления на вькоде блока ю 4 сигнала 60% загрузки кузова открываются все ключи блока 6 и электрические сигналы от датчиков 1 давления поступают, кроме входов блока 2, на входы блока 7. При постоянных is значениях давления газа в полостях цилиндров подвески сигналы с выходов .датчиков 1 также постоянны, поэтому сигналы на выходе блока 7 отсутствуют. .Разгрузка Очередного ковша экска-20 ватора вызывает колебания давления газа, вид которых представлен на фиг. 2. После окончания колебаний поршни цилиндров застревают в зонах нечувствительности (+Р,-Р), 25 образованных силами сухого трения. В диапазоне взвешивания и контроля загрузки автосамосвала (от 60 до 100% загрузки кузова) изменения частоты свободных колебаний кузова и коэффициента сопротивления незначительны, следовательно, между скоростью изменения давления газа и положения поршней цилиндров в; зоне нечувствительности существует жесткая связь. Зависимость положения поршней цилиндров в зонах нечувствительности от максимума скорости изменения давления газа в последнем полупериоде колебаний подрессоренных масс определяется выражением 4UJP.,o,v 4ш Ь2 +4ш2 где Р - давление газа в цилиндре подвески, определяемое силой сухого трения. Па; 50 Р, - давление газа, соответствующее половийе зоны нечувствительности цилиндра. Па; U) - частота свободных колебаний подрессоренной массы на ци-ь: линдре подвески, h - коэффициент сопротиачёния цилиндра подвески, по на ус гд Р по пр и к ве ре одо же ци я То ны оп ск ци эт ви Р - максимум модуля скорости изменения давления газа в последнем полупериоде колебаний подрессоренной массы. Па/с; С учетом (1) масса М груженой дрессоренной части автосамосвала, пример БелАЗ-549, определяется тройством на основе вьфажения М | PftniV РэлГРзгт1у- К,( е ,988 - коэффициент, учитывающий наклон передних цилиндров к оси передних колес;К2 1,46 - коэффици1ент, учитьшающий влияние рычагов задней подвески автосамосвала;,038 м - площадь поршня подвески цилиндра; g - ускорение свободного падения; давления газа в передних и задних, правом и левом цилиндрах подвески, определяемые силой сухого трения в соответствии с (1). Гра ческое отображение функции f (Р..,д,.) на примере цилиндров двески автосамосвала БелАЗ-549 едставлено -на фиг. 3. Индексы п 3. означают отношение обозначения переднему или заднему цилиндру подбки. Значения , 9,68 18,83 hn 2,42 h 4,1l с л, - - - 9 3 ±5 10 Па определены по зультатам экспериментальных исслеваний и заданы постоянными. Дпя технической реализации вырания (1) зону нечувствительности линдров можно разделить прямыми Ъ, Ъ, на три равные части. гда в точках пересечения указанх прямых с прямыми Р ( ределятся граничные значения оростей для переднего и заднего линдров подвески. Реализация в ом случае выполняется в соответсти со следующими нер : енсГвами: для + Р llr для -Р I PI I ,х РгпРи| 0 или P 0 для P Техническую реализацию неравенств (3) выполняют блоки 6 - 12. При разгрузке очередного ковша после 60% загрузки кузова возникают колебания подрессоренных масс и на входе блока 7 появляются сигналы, пррпорциональные скорости изменения давления газа в цилиндрах подвески. 9 запоминает максимум скоростей как положительного, так и отрицательного знака. Блок 8 управляет сбросом детекторов блока 9 при наличии нескольких колебаний массы подрессоренной части. Так при нарастании скорости положительного знака до нуля сбрасываются детекторы отрицательных значений скорости и наоборот. После окончания последнего колебания (сигналы с выхода блока 7 становятся равными нулю) компараторы блока 8 из-за гистерезиса не переключаются. В результате на выходе блока 8 образуются сигналы, информирую1цие о знаке скорости изменения давлений газа в цилиндрах подвески (Р 0 ипи Р 0 в последнем полупериоде колебаний подрессоренных масс, а на и 1ходе Iблока 9 - сигналы, пропорциональные максимуму модуля скорости колебаний. Компараторы блока 10 настраиваютграничньшиначе соответствии с ниями скоростей t, , Р„2 . ъг Р (фиг. 3). Из трех компараторов, подключеннЕлх к выходу каждого амплитудного детектора, один настраивается на срабатывание при скорости близ-4о кой к нулю, второй - на срабатывание 1 ,0 8« например, при скорости Р,, третий при скорости п2 f-P, В результате после окончания колебаний на выходе блока to образуется информация в виде электрических сигналов о том, в какой из трех частей зон нечувствительности остановились поршни цилиндров подвески. Блок 11 на основании сигналов с блоков 8 и 10 реализует неравенства (3) и вырабатывает сигналы,управляющие переключателями 12. Так, например, если для всех щшиндров реализовано первое неравенство, то на выходе блока 12 появятся сигналы, по которым переключатели 12 подключат на вход блока 2 напряжения UJP положительного знака. При реализации, например, третьего неравенства сигналы t: блока 11 будут такими, чтобы подключились напряжения Ufiiv- Ujfi отрицательного знака и Т.д. Значения ILf Цц, выбираются пропорциональными значениями Р и могут быть заданы постоянными и равHU m, например 2/3 Pf, Тогда при реализа1даи неравенств (3) как бы в три раза уменьшается зона нечувствительности каждого Щ1линдра подвески и, соответственно, в три раза повышается точность контроля загрузки автосамосвала. Использование предлагаемого устрой ства для взвешивания грузов в кузове большегрузного автосамосвала позволцу повысить точность взвешивания перевозимого груза за счет снижения погрешности от сил сухого трения в цилиндрах пнёвмогйдроподвесок.
Фиг.1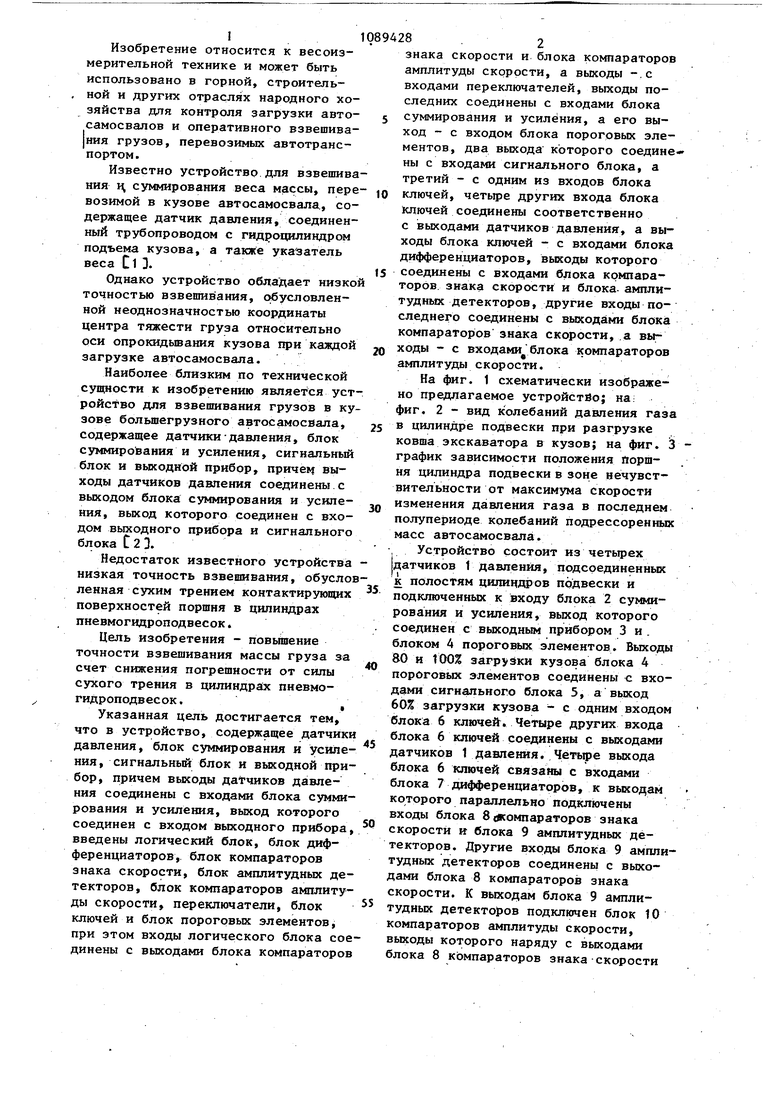
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания груза в автосамосвале | 1984 |
|
SU1190203A1 |
| УСТРОЙСТВО КОНТРОЛЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО САМОСВАЛОМ, И ПОДВЕСКИ КАРЬЕРНОГО САМОСВАЛА | 2005 |
|
RU2311620C2 |
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |
| Устройство для снижения остаточных сварочных напряжений | 1977 |
|
SU673997A1 |
| Способ контроля массы груза и устройство для его осуществления | 1988 |
|
SU1550328A1 |
| Устройство для измерения напряженности магнитных полей в дефектоскопии | 1986 |
|
SU1383194A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2000 |
|
RU2184992C1 |
| СИСТЕМА РЕГИСТРАЦИИ И КОНТРОЛЯ РЕЙСОВ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2586860C2 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2244341C2 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2003 |
|
RU2249252C2 |
УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ В КУЗОВЕ ЮЛЫПЕГРУЗНОГО АВТОСАМОСВАЛА, содержащее датчидси давления, блок суммирования и усиления, сигнальный блок и выхбдной прибор, причем выходы датчиков давления соединены с входами блока суммирования и усиления, выход которого соединен с входом выходного прибора, отличающееся тем, что, с целью повышения точности взвеши- вания массы груза за счет снижения погрешности от сип сухого трения в 1щлиндрах пневмогидроподвесок, в него введены логический блок, блок дифференциаторов, блок компараторов знака скорости, блок амплитудных детекторов, блок компараторов амплитуды скорости, переключатели, блок ключей и блок пороговых элементов, причем входы логического блока соединены с выходами блока кс тараторов знака скорости н блока компараторов амплитуды скЪрости, а выходы - с входами переключателей, выходы которых соединены с входами блока суммирования и усиления, а его выход соединен с входом блока пороговых элементов, два выхода которого соединены с входами сигнального блока, а третий - с одним из входов блока ключей, четыре других входа блойа ключей соединены соответственно с выходами датчиков давления, а выходы блока ключей - с входами блока дифференциаторов, выходы которого соединены с входами блока компараторов знака скорости и блока амплитудных детекторов, другие входы блока амплитудО 00 ных детекторов соединены с выходами блока компараторов знака скорости, со а выходы - с входами блока компара4 торов амплитуды скорости. ND 00
(pui.Z
PW -РТЗ
фиг. 3
g P-W,no
t ofaa/c
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для взвешивания грузов в кузове большегрузного автосамосвала | 1975 |
|
SU527601A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
