f Изобретение относится к измерительной технике и может быть использ вано для градуировки образцовых динамометров . Известное устройство для задания силы представляет собой криостат с жидким гелием, в котором размещена центрирующая рамка со сверхпроводящими соленоидами, один из которых жестко связан с поршнем, а другой с цилиндром. При питании соленоидов параллельными токами возникает сила электромагнитного взаимодействия, де ствующая па опорные плиты поршня и цилиндраС1 . Недостатком этого устройства является низкая точность воспроизведения силы. Наиболее близким по технической сущности к предлагаемому является уст ройство для динамической градуировки динамометров, которое имеет-две неподвижные сверхпроводящие обмотки, жестко связанные с корпусом, и подвижную сверхпроводящую обмотку, жестко связанную с силопередающей штангой, причем все обмотки расположены соосно. Силопередающая штанга выведена из гелиевого объема и соединена с градуируемым динамометром, магазин конденсаторов и блок переменных конденсаторов соединены с соответствующ,ими обмотками параллельно и образуют резонансный контур. При пропускании тока по обмоткам от источника питания между подвижной и неподвиж ной обмотками, возникают переменные си лы электромагнитного взаимодействия , которые через силоцередающую штангу действуют на градуируег-шш динамометр. Частота переменных сил равна резонанс ной частоте колебательных контуров, а амплитуда силы пропорциональна квадрату тока, пропускаемому через об обмоткамиС2 . Однако в известном устройстве недостаточная точность воспроизведения сипы зависимости ее от перемеще ния катушек, а также в результате того, что-сила определяется расчетным путем. Цель изобретения - повышение точности воспроизводимых и расширение диапазона задаваемы сил. Поставленная цель достигается тем, что в устройство для градуировки динамометров, содержащее фундамент. 5 силовводящие узлы, две неподвижные и одну подвижную сверхпроводящие обмотки, расположенные вдоль одной оси, и источник питания,введены расположенная соосно первой вторая подвижная обмотка, преобразователь перемещения градуируемого динамометра, сменные упругие элементы, а неподвижные обмотки жестко связаны между собой и соединены с фундаментом через упругие элементы, подвижные обмотки расположены снаружи от неподвижных и связаны с силовводящими узлами, источник питания выполнен управляемым с одним входом и двумя независимыми выходами, вход источника питания соединен с преобразователем перемещения градуируемого динамометра, первый выход источника питания связан с одной из подвижных обмоток и примыкающей к ней неподвижной обмоткой, а второй выход связан с другой подвижной обмоткой и примыкающей к ней неподвижкой, при этом смежные торцы подвижнь1х и неподвижных обмоток вьтолнены в виде идентичных тороидальных поверхностей с одинаковыми радиусами кривизобмотками составляет 0,7-0,8 расстояния между- подвижной и неподвижной обмотками, причем суммарная жесткость упругих элементов равна суммарной жесткости силовводящих узлов и градуируемого динамометра. На чертеже показана схема устройства для градуировки динамометров. В устройстве подвижная обмотка 1 жестко связана с силовводящим узлом 2, а подвижная обмотка 3-е силовводящим узлом 4. Между силовводящими узлами 2 и 4 установлен градуируемый динамометр 5. Подвижные обмотки 1 и 3 через домкрат 6 размещены на основании. Неподвижные обмотки 7 и 8 связаны между собой и основанием упругими элементами 5, жесткость которых равна жесткости силовводящих узлов 2 и 4 и градуируемого .динамометра 5. Расстояние между неподвижными обмотками 7 и 8 составляет 0,7-0,8 расстояния между подвижной и неподвижной обмотками 1,7 и 3,8. Подвижные 1,3 и неподвижные 7,8 обмотки выполнены из сверхпроводников и помещены в индивидуальные криос таты, а смежные торцы подвижных и неподвижных обмоток 1,7 и 3,8 вьтолнены в виде тороидальных поверхностей с одинаковыми радиусами кривизны. Преобразователь 10 перемещения механически связан с градуируемым динамометром 5 и основанием. Выход преобразователя 10 перемещения соединен с входом источника 11 питания. Набор дисков (эталонная мера силы) 12 вместе с силопередающей рамой 13 язан с основанием с помощью домкрата 14.
Устройство работает следующим образом.
При пропускании тока через подвижные 1,3 и неподвижные 7,8 обмотки от источника 11 питания между ними возникает сила электромагнитного взаимодействия, которая подводится через силовводящие узлы 2 и 4 к градуируемому динамометру 5. Во время работы подвижные обмотки 1 и 3 освобождаются от домкратов 6. Для удержания всей системы в исходном положении преобразователь 10 перемещения подает сигнал на вход источника 11 питания . который управляет током в обмотках 1,7 и 3,8. При воспроизведении силы во всем диапазоне между обмотками 1,7 и 3,8 расстояние остает ся практически постоянным, так как деформация силовводящих узлов 2,4 и градуируемого динамометра 5 компенсируется деформацией упругих элементов
Для определения зависимости силы, воспроизводимой установкой, от тока в обмотках 1,3 и 7,8 применяется эталонная мера силы (набор дисков 12). Набор дисков 12 опускается с помощью
домкрата 14 и через силопередающую раму 13 прикладывается к силопередающему цилиндру. Все набора дисков 12 компенсируется силой электромагнитного взаимодействия между обмотками 3 и 8, т.е. увеличением в них тока. При снятии нагрузки набора дисков 12 их вес компенсируется увеличением тока в обмотках 1 и 7. Данная операция повторяется до достижения номинального значения силы воспроизводимой установкой. Уменьшение силы от номинального значения до минимального про,изводится также путем нагружения набора дисков 12 на силопередающий цилиндр 2 но компенсация веса набора дисков 12 производите уменьшением тока в обмотках 1 и 7. При снятии нагрузки от наборадисков 12 компенсация веса производится уменьшением тока в обмотках 3 и 8 и т.д.
С помощью эталонной меры силы имеется возможность определить зависимость силы, воспроизводимой установкой от измеряемого тока в обмотках с погрешностью не более 0,003%, а также определить гистерезис установки. Таким образом, зная экспериментальную зависимость силы от тока, в дальнейшем по показаниям тока возможно определять силу, воспроизводимую установкой, с погрешностью не более 0,01%.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической градуировки динамометров | 1982 |
|
SU1067379A1 |
| Способ градуировки динамометров | 1987 |
|
SU1432360A1 |
| Способ градуировки динамометров | 1988 |
|
SU1645864A1 |
| Устройство для градуировки динамометров | 1982 |
|
SU1027552A1 |
| Устройство для градуировки динамометров | 1981 |
|
SU970155A1 |
| Устройство для динамической градуировки динамометров малых сил | 1985 |
|
SU1267188A1 |
| Способ измерения силы | 1989 |
|
SU1622782A1 |
| Способ динамической градуировки динамометра | 1988 |
|
SU1610335A2 |
| Устройство для градуировки измерительных преобразователей ударных ускорений | 1982 |
|
SU1064205A1 |
| Способ динамической градуировки динамометра | 1985 |
|
SU1276932A1 |
УСТРОЙСТВО ДЛЯ ГРДЦУИРОВКИ ДИНАМОМЕТРОВ, содержащее фундамент, силонводящие узлы, две неподвижные и одну подвижную сверхпроводящие обмотки, расположенные вдоль одной оси, и источник питания, отличающееся тем, что, с целью расширения диапазона и повьппения то ности задания сил, в него введены расположённая соосно первой вторая подвижная обмотка, преобразователь перемещения градуируемого динамомет ра, сменные упругие элементы, непод вижные обмотки жестко связаны между лг- -П собой и соединены с фундаментом через упругие элементы, подвижные обмотки расположены снаружи от неподвижных и связаны с силОБВОДЯЩИМИ узлами, источник питания выполнен управляемым с одним входом и двумя независимыми выходами, вход источника питания соединен с преобразователем перемещения градуируемого динамометра, первый выход источника питания связан с одной из подвижных обмоток и примьжающей к ней неподвижной обмоткой, а второй выход связан с другой подвижной обмоткой и примыкающей к ней неподвижной, при этом смежные торцы подвижных и неподвижных обмоток выполнены в виде идентичных тороидальных поверхностей с одинаковыми радиусами кривизны, а расстояние между неподвижными обмотками составляет 0,7-0,8 расстояния между подвижной и неподвижной обмотками, причем суммарная жесткость упругих элементов равна суммарной жесткости силовводящих узлов и градируемого динамометра.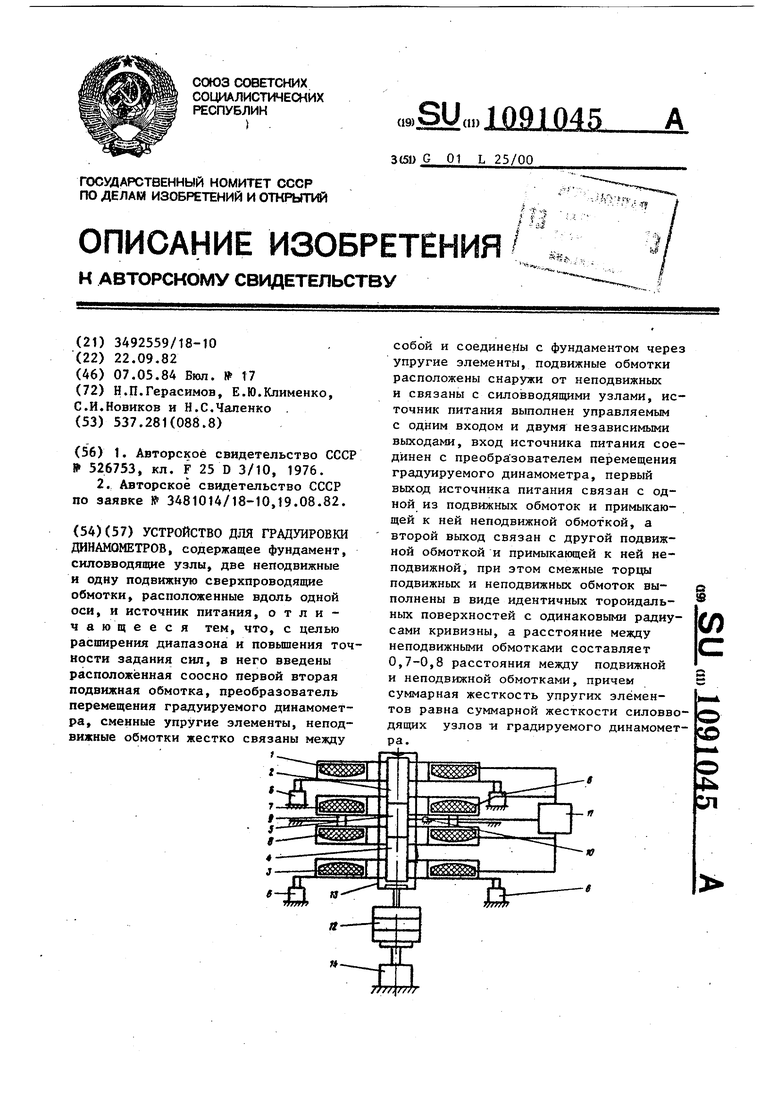
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Низкотемпературный пресс | 1974 |
|
SU526753A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3481014/18-10,19.08.82. | |||
