IsD СЛ СЛ Ю
Изобретение относится к измерительной технике и может быть применено, для градуировки динамометров
Известно устройство, содержащее основание, штангу, траверсы с уста новленными на них мерами силы t.l,2
Однако известное устройство не позволяет получить непре ялвное значение воспроизводимой cHijjbi, а диапазон воспроизведения недоста;точен из-за веса штанги.
На{ более близким к предлагаемому является устройство, содержащее оснвание, расположенное на регулируемых опорах, привод, механизм вращения с валом, на котором расположена платформа, при зтом ось вала расположена параллельно основанию, датчик угд поворота вала, меру силы, устанаёленную на платформе, систему тяг, при помсици которых градуируемый динамометр соединяется с силовой осью мери силы; 2.
Однако указанное устройство характеризуется недостаточной точноетью определения изменяющегося угла между платформой и горизонталью, наличием упругих дефснэмаций в тросе соединяющем меру силы и градуируемый динамометр.
Цельизобретения - повышение точности и расширение диапазона в сторону малых сил устройства для градуировки динамометров.
Указанная цель достигается тем, что устройство для градуировки динамометров, содержащее основание, расположенное на регулируемых по высоте опорах, привод/ механизм вращения, на валу которого установлена основная платформа, дatчик угла поворота вала, образцовую меру силы и Фиксатор для установки градуируемого динамометра, снабжено дополнительной платформой с реверсивным механизмом поворота в подшипниках, соединенным с механизмом вращения редуктором с коэффициентом редукции равным единице, ось вала механизма вращения расположена под углсяи 45° к основанию, а основная платформа под углом к оси вала, подшипники установлены на основной платформе так, что их оси паргшлельны ее плоскости, при этом на доиолнитель: ной платформе установлены аэростати ческие пода1ипники, охватывающие выполненную в виде цилиндра Образцовую меру СИЛЫ, снабженную захватом для градуируемого динамс «етра/ Прй;чем ось образцовой мерыСИЛЫ параллельна плоскости дополнительной платфо5 вы, а фиксатор связан с дополнительной платформой.
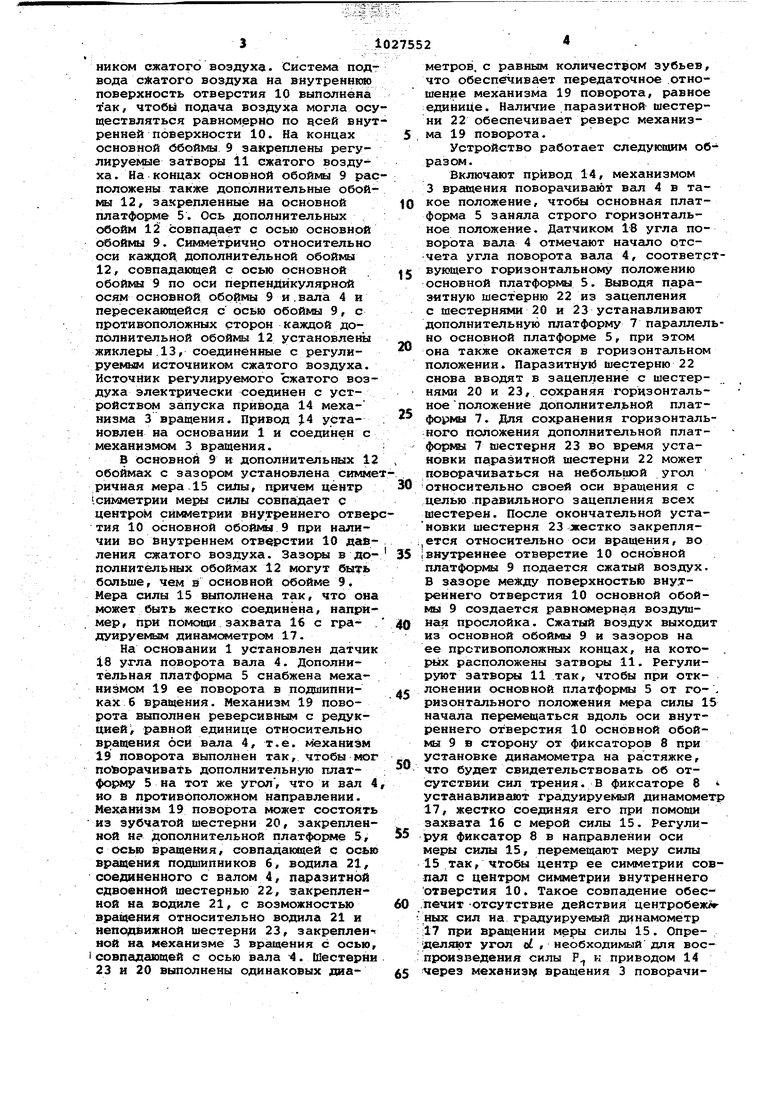
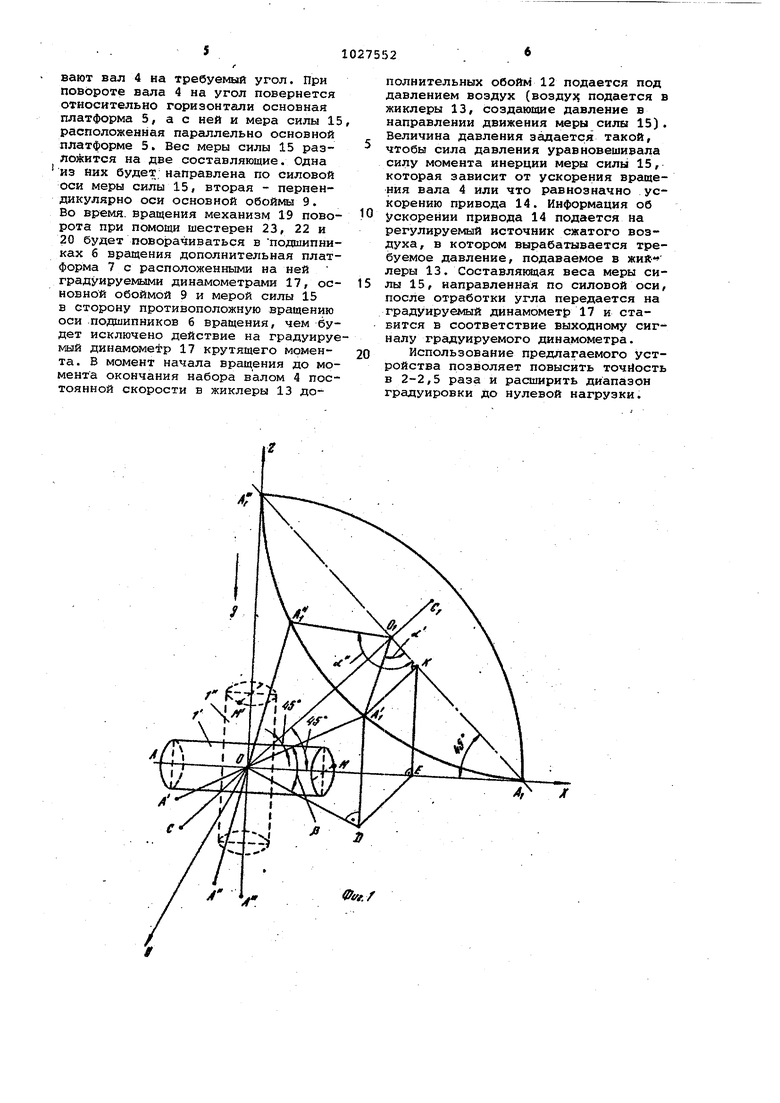
На фиг. 1 представлена схема перемещения меры силы устройства в пространстве относительно горизонтального положения/ на фиг. 2 - схе- ма предлагаемого устройства.
Устройство позволяет осуществлять перемещен11е силовой оси меры силы по конической поверхности конуса враще5 ния с углом при основании 45°и основанием, расположенным под углом 45 к горизонтали.
На фиг. 1 силовая ось А-А меры ы 1 расположена под углом 45
силы 1 расположена под углом к оси С-С
вала механизма вращения. Ось С-С вала расположена под углом 45° к горизонтальной плоскости. ХОУ. При вращении оси С-С силовая ось А-А меры силы образует конус врае щения с высотой 0-0 , расположенной под углом 45° к горизонтальной плоскости ХОУ. Вершина конуса находится в точке О, в основании конуса - окружность с центром 0, плоскость которой перпендикулярна
0-0-, и расположена под углом к плоскости ХОУ. При повороте оси С-С вала- на угол , ось А-А меры силы l займет положение А-А,
при повороте на угол положение
. По силовой оси меры силы 1 будет действовать сила, равная Рд P(u, К Д р- угол между силовой осью j и горизонтальной плоскостью ХОУ, т.е. проекцией оси А-А на плоскость ХОУ. При перемещении силовой силы по конической поверхности силоJ вая ось будет образовывать с горизонталью угол (ь, соответствующий
5 гкэвороту оси вала. Тогда на градуируемый динамометр удет действовать
сила F
P(.sin
При изменении
угла oi. от О до 18 что соответствует положению силовой оси А-А и А-А, , сила F изменится от О
, fnJlCi I . п . п J J ДО
максимального значения, равного Р.Устройство для градуировки динамометров содержит основание 1, расположенное на регулируемых опорах 2. На основании 1 установлен механизм 3вращения с валом 4, oci котоIрого образует с основанием 1 угол 45. На валу 4 механизма 3 вращения под углом 45 к его оси закреплена основная платформа 5. На последней установлены подшипники 6 вращения, ось вращения которых параллельна . платформе 5 и пересекается с осью вала 4 под углом 45°. В подашпниках б вращения параллельно их.оси установлена дополнительная платформа 7, на которой размещен регулируемый фиксатор 8 для установки градуируемого динамометра. .На дополнительной платформе 7 установ1лена также основная обойма 9, в которой выполнено сквозное внутреннее отверстие 10, у которого ось совпадает с осью подшипников 6 вращения, центр симметрии совпадает с осью вала 4, а внут ренняя поверхность соединена с источНИКОМ сжатого воздуха. Система под вода сжатого воздуха на внутреннюю поверхность отверстия 10 выполнена так, чтобы подача воздуха могла осу ществляться равномерно по щсей внут ренней поверхности 10. На концах основной дбоймы 9 закреплены регулируемые затворы 11 сжатого воздуха . На концах основной обойма 9 рас положены также дополнительные обоймы 12, закрепленные йа основной платформе 5. Ось дополнительных обойм 12 совпадает с осью основной обоймы 9. Симметрично относительно оси каждой, дополнительной обоймы 12, совпадакяцей с осью основной обоймы 9 по оси перпендикулярной осям основной обойгмы 9 и.вала 4 и пересекакицейся с осью обоймы 9, с противоположных рторон каждой дополнительной обоймы 12 установле1ш жиклеры 13, соединенные с регулируемым источником сжатого воздуха. Источник регулируемого сжатого воздуха электрически соединен с устройством запуска привода 14 механизма 3 вращения. Привод }.4 установлен на основании 1 и соединен с механизме 3 вращения. : В ОСНОВНОЙ 9 и дополнительщлх 12 обоймах с зазорс 4 установлена симме ричная мера.15 силы, причем центр симметрии меры силы совпадает с центром симметрии внутреннего отвер тия 10 основной 9 при наличии во внутреннем отв @рстии 10 давления сжатого воздуха. Зазоры в дополнительных обоймах 12 могут быть больше, чем в основной обойме 9. Мера силы 15 выполнена так, что она может дть жестко соединена, например, при помощи захвата 16 с градуируемым динамсилетром 17. На основании 1 установлен датчик 18угла поворота вала 4. Дополнительная платформа 5 снабжена механизмом 19 ее поворота в подааипниках 6 вращения. Механизм 19 поворота выполнен реверсивным с редукцией равной единице относительно вращения оси вала 4, т.е. механизм 19поворота выполнен так, чтобы мог поворачивать дополнительную платформу 5 на тот же угол , что и вал 4 но в противоположном направлении. Механизм 19 поворота может состоять из зубчатой шестерни 20, закрепленной не дополнительной платформе 5, с осью вращения, совпадающей с осью вращения подшипников 6, водила 21, соединенного с валом 4, паразитной сдвоенной шестернью 22, закрепленной на водиле 21, с возможностью вращения относительно водила 21 и неподвижной шестерни 23, закрепленной на механизме 3 вращения с осью совпадающей с осью вала . Шестерни 23 и 20 выполнены одинаковых диаметров, с равным количеством зубьев, что обеспечивает передаточное отношение механизма 19 поворота, равное единице. Наличие паразитной шестерни 22 обеспечивает реверс механизма 19 поворота. Устройство работает следуюсдам образом. Включают привод 14, механизмом 3 вращения поворачива бт вал 4 в такое положение, чтобы основная платформа 5 заняла строго горизонтальное положение. Датчиком 18 угла поворота вала 4 отмечают начало отсчета угла поворота вала 4, соответствукяцего горизонтальному положению основной платфорьвл 5. Выводя паразитную шестерню 22 из зацепления с шестернями 20 и 23 устанавливают дополнительную платформу 7 параллельно основной платформе 5, при этом она также окажется в горизонтальном положении. Паразитнуй шестерню 22 снова вводят в зацепление с шестернями 20 и 23,. сохраняя горизонтальное положение дополнител.ьной платфорьал 7. Для сохранения горизонтального положения дополнительной платформы 7 шестерня 23 во время установки паразитной шестерни 22 может поворачиваться на небольшой угол относительно своей оси вращения с целью .правильного зацепления всех шестерен. После окончательной установки шестерня 23 жестко закрепля,ется относительно оси вращения, во jвнутреннее отверстие 10 основной платформы 9 подается сжатый воздух. В зазоре между поверхностью внутреннего отверстия 10 основной обоймы 9 создается равнс 1ерная воздушная прослойка. Сжатый воздух выходит из основной обоймы 9 и зазоров на ее противоположных концах, на кото- . рых расположены затворы 11. Регулируют затвори 11 так, чтобы при отклонении основной платформы 5 от го- . ризонтального положения мера силы 15 начала перемещаться вдоль оси внутреннего отверстия 10 основной обоймы 9 в сторону от фиксаторов 8 при установке динамометра на растяжке, что будет свидетельствовать об отсутствии сил трения. В фиксаторе 8 устанавливают градуируемый динс1мометр 17, жестко соединяя его при помощи захвата 16 с мерой силы 15. Регулируя фиксатор 8 в направлении оси меры силы 15, перемещают меру силы 15 так, центр ее симметрии совпал с центром сикшетрии внутреннего отверстия 10. Такое совпадение обеспечит -отсутствие действия центробеж/г ных сил иа градуируемый динамометр ;17 при вращении меры силы 15. Определяют угол oL , необходимый для воспроизведения силы Р к приводом 14 через механиз14 вращения 3 поворачи1вают вал 4 на требуемый угол. При повороте вала 4 на угол повернется относительно горизонтали платформа 5, а с ней и мера силы 15 Неположенная параллельно основной платформе 5. Вес меры силы 15 разло йтся на две оставляющие Одна из них будет., направлена по силовой оси меры силы 15, пикулярно оси основной обоймы у. и BpeL вращения механизм 19 поворота при помоши шестерен 23, Jj и 20 будет поворачиваться в подшипниках б вращения дополнительная платформа 7 с расположенными на ней градуируемЕлми динамометрами ос новной обоймой 9 и мерой силы 15 в сторону противоположную вращению оси подшипников 6 вращения, чем бу де исключено действие на градуируе мый динамоме±р 17 крутящего момента В момент начала вращения до мо мента окончания набора валом 4 пос тоянной скорости в жиклеры 13 до2олнительных обоим- 12 авлением воздух ( Г иклеры 13, создающие давление в направлении движения «Рь. величина давления задается такой, Йобы сил давления уравновешивала силу момента инерции меры 15, ГилГч о . .. буемое давление, подаваемое в жи«- леры 13. составляющая веса меры си лы 15, направленная по силовой оси, nocJeотработки угла передается на гпадуируемлй динамометр 17 и ста в соответствие выходному сигналу градуируемого динамометра. использование предлагаемого уст ройства позволяет повысить точность в 2-2,5 раза и расширить диапазон градуировки до нулевой нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для градуировки универсальных динамометров | 1983 |
|
SU1112246A1 |
| Устройство для динамической градуировки динамометров малых сил | 1985 |
|
SU1267188A1 |
| Устройство для градуировки динамометров | 1983 |
|
SU1149131A1 |
| Устройство для градуировки силовоспроизводящей машины с наклонной плоскостью | 1984 |
|
SU1312420A1 |
| Устройство для градуировки динамометров | 1981 |
|
SU970155A1 |
| Установка для градуировкиАКСЕлЕРОМЕТРОВ | 1979 |
|
SU853557A1 |
| Способ градуировки динамометров | 1988 |
|
SU1645864A1 |
| Устройство для измерения силы | 1982 |
|
SU1024753A1 |
| Устройство для градуировки измерительных преобразователей переменного давления | 1986 |
|
SU1392410A2 |
| Устройство для градуировки динамометров | 1982 |
|
SU1091045A1 |
УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ ДИНАМОМЕТРОВ, содержащее основание, расположенное на регулйруекнх по высоте опорах, привод, механизм вращения , на Всшу которого установлена основная платформа, датчик угла поворота вала, образцовую меру силы и фиксатор для установки градуируемого динамометра, о т л и -ч а ю щ ё е с я тем, что, с целью повы- : шения точности градуировки и расши1рёния диапазона задаваемых сил, оно снабжено дополнительной платформой с реверсивным механизмом поворота в подшипниках, соединенным с механизмом вращения редуктором с коэффициентом редукции, равным единице, ось вала механизма вращения расположена под углом 45 к основанию, а основная платформа.- под углом :45 к оси вала, подцшпники установлены на основной платформе так, что их оси параллельны ее плоскости, при этом на дополнительной платформе установлены аэростатические подшипники, охватывающие выполненную в виде цилиндра образцовую меру силы, снабженную захватом для градуируемого динамометра, причем ось образцовой меры силы параллельна плос-{ кости дополнительной платформы, а фиксатор связан с дополнительной Ш1атфо Жой.
Л
%«/
ff/ff VC/fTOV/fOyrff
fw/mfto vc/f. fJf/ff ftfffl9rfflfff ff «v УЧУ Vf.Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU236075A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Текстильная промьшшеннбсть, 1970, 8j с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| J | |||
